 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntroducing Graph Learning over Polytopic Uncertain Graph
Apr 12, 2024This extended abstract introduces a class of graph learning applicable to cases where the underlying graph has polytopic uncertainty, i.e., the graph is not exactly known, but its parameters or properties vary within a known range. By incorporating this assumption that the graph lies in a polytopic set into two established graph learning frameworks, we find that our approach yields better results with less computation.
Greedy Synthesis of Event- and Self-Triggered Controls with Control Lyapunov-Barrier Function
Feb 24, 2023



This paper addresses the co-design problem of control inputs and execution decisions for event- and self-triggered controls subject to constraints given by the control Lyapunov function and control barrier function. The proposed approach computes the control input in a way that allows for longer inter-execution intervals, which distinguishes it from many existing event- and self-triggered controllers or control Lyapunov-barrier function controllers. The proposed approach guarantees lower bounds on the minimum inter-execution times. The effectiveness of the proposed approach is demonstrated and compared with existing approaches using a numerical example.
Neural Controller Synthesis for Signal Temporal Logic Specifications Using Encoder-Decoder Structured Networks
Dec 10, 2022



In this paper, we propose a control synthesis method for signal temporal logic (STL) specifications with neural networks (NNs). Most of the previous works consider training a controller for only a given STL specification. These approaches, however, require retraining the NN controller if a new specification arises and needs to be satisfied, which results in large consumption of memory and inefficient training. To tackle this problem, we propose to construct NN controllers by introducing encoder-decoder structured NNs with an attention mechanism. The encoder takes an STL formula as input and encodes it into an appropriate vector, and the decoder outputs control signals that will meet the given specification. As the encoder, we consider three NN structures: sequential, tree-structured, and graph-structured NNs. All the model parameters are trained in an end-to-end manner to maximize the expected robustness that is known to be a quantitative semantics of STL formulae. We compare the control performances attained by the above NN structures through a numerical experiment of the path planning problem, showing the efficacy of the proposed approach.
Towards Better Adaptive Systems by Combining MAPE, Control Theory, and Machine Learning
Mar 19, 2021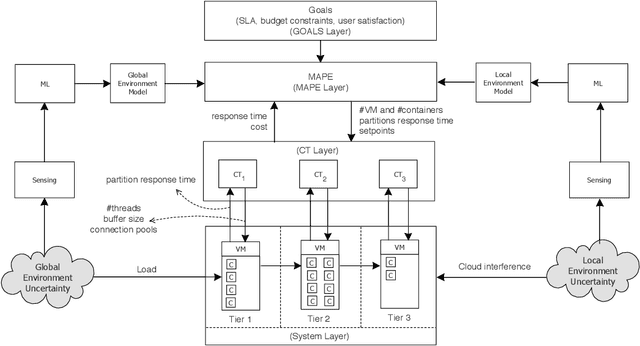


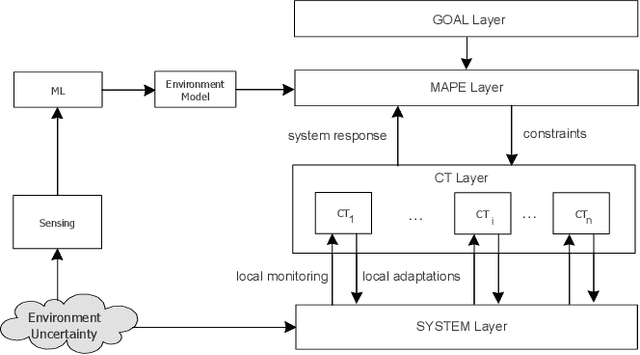
Two established approaches to engineer adaptive systems are architecture-based adaptation that uses a Monitor-Analysis-Planning-Executing (MAPE) loop that reasons over architectural models (aka Knowledge) to make adaptation decisions, and control-based adaptation that relies on principles of control theory (CT) to realize adaptation. Recently, we also observe a rapidly growing interest in applying machine learning (ML) to support different adaptation mechanisms. While MAPE and CT have particular characteristics and strengths to be applied independently, in this paper, we are concerned with the question of how these approaches are related with one another and whether combining them and supporting them with ML can produce better adaptive systems. We motivate the combined use of different adaptation approaches using a scenario of a cloud-based enterprise system and illustrate the analysis when combining the different approaches. To conclude, we offer a set of open questions for further research in this interesting area.
Model predictive approach to integrated path planning and tracking for autonomous vehicles
May 09, 2019
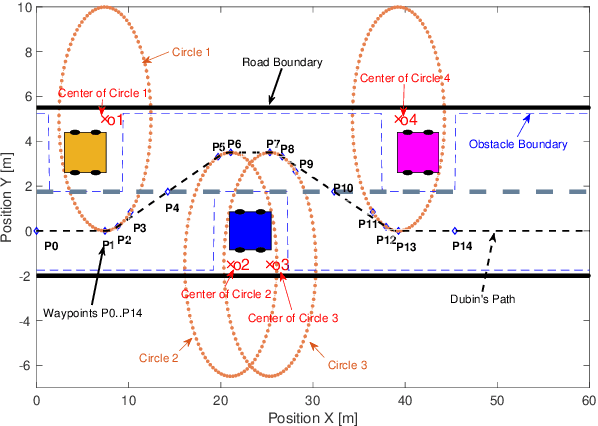
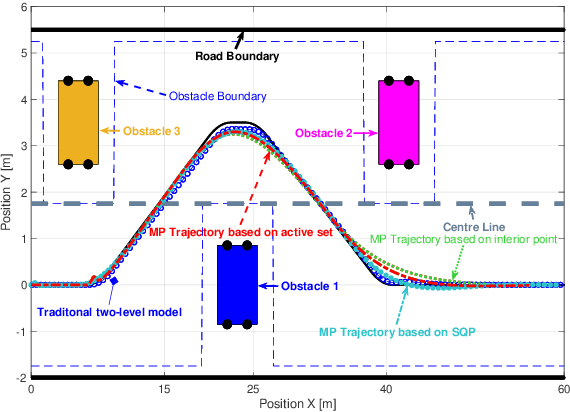
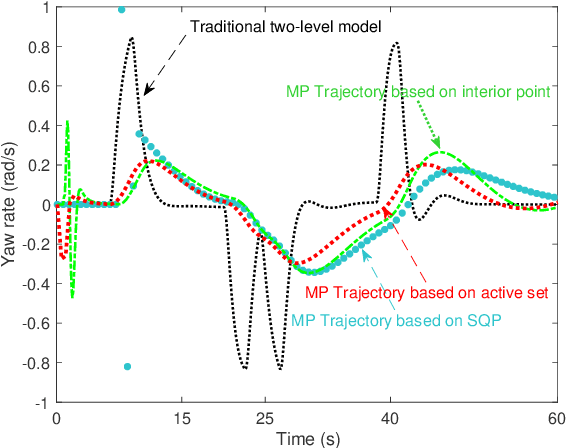
In the path planning problem of autonomous application, the existing studies separately consider the path planning and trajectory tracking control of the autonomous vehicle and few of them have integrated the trajectory planning and trajectory control together. To fill in this research gap, this study proposes an integrated trajectory planning and trajectory control method. This paper also studies the collision avoidance problem of autonomous by considering static and dynamic obstacles. Simulation results have been presented to show the effectiveness of the proposed control method.