 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Social Triad model of Human-Robot Interaction
Aug 08, 2023Despite the increasing interest in trust in human-robot interaction (HRI), there is still relatively little exploration of trust as a social construct in HRI. We propose that integration of useful models of human-human trust from psychology, highlight a potentially overlooked aspect of trust in HRI: a robot's apparent trustworthiness may indirectly relate to the user's relationship with, and opinion of, the individual or organisation deploying the robot. Our Social Triad for HRI model (User, Robot, Deployer), identifies areas for consideration in co-creating trustworthy robotics.
Verified Synthesis of Optimal Safety Controllers for Human-Robot Collaboration
Jun 11, 2021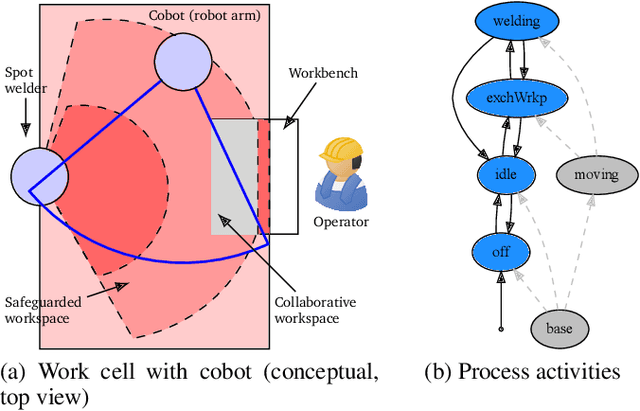
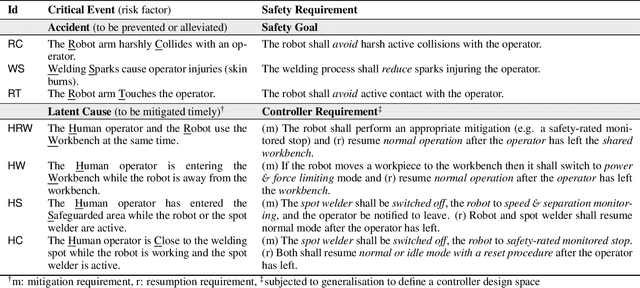
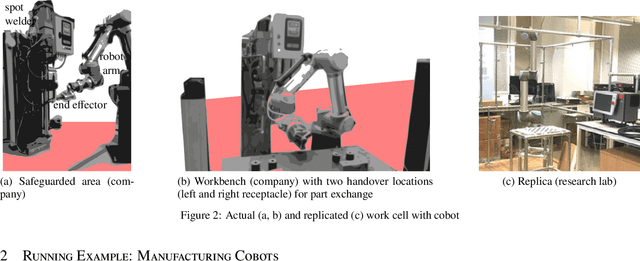
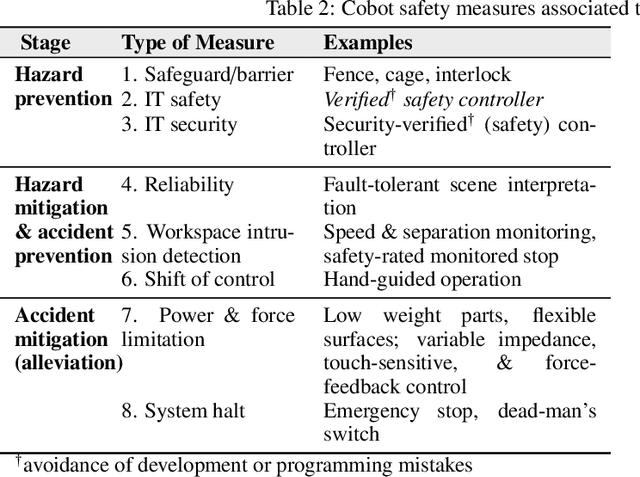
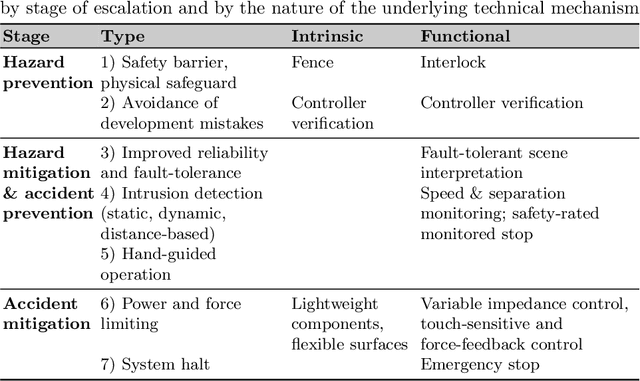
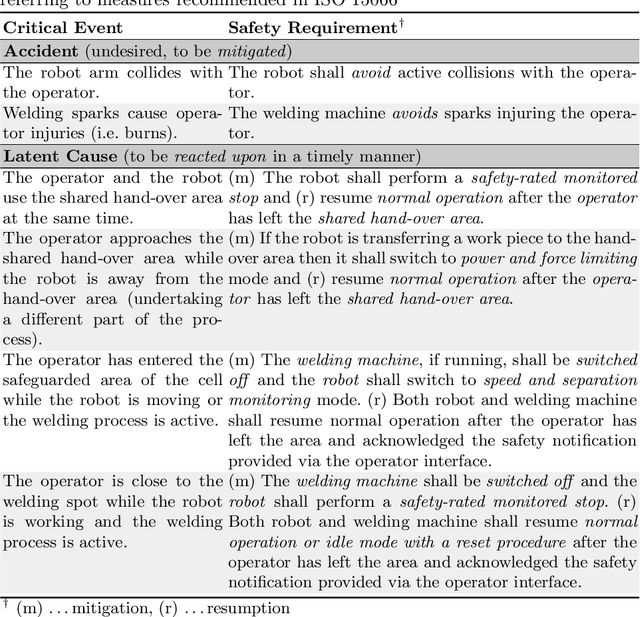
We present a tool-supported approach for the synthesis, verification and validation of the control software responsible for the safety of the human-robot interaction in manufacturing processes that use collaborative robots. In human-robot collaboration, software-based safety controllers are used to improve operational safety, e.g., by triggering shutdown mechanisms or emergency stops to avoid accidents. Complex robotic tasks and increasingly close human-robot interaction pose new challenges to controller developers and certification authorities. Key among these challenges is the need to assure the correctness of safety controllers under explicit (and preferably weak) assumptions. Our controller synthesis, verification and validation approach is informed by the process, risk analysis, and relevant safety regulations for the target application. Controllers are selected from a design space of feasible controllers according to a set of optimality criteria, are formally verified against correctness criteria, and are translated into executable code and validated in a digital twin. The resulting controller can detect the occurrence of hazards, move the process into a safe state, and, in certain circumstances, return the process to an operational state from which it can resume its original task. We show the effectiveness of our software engineering approach through a case study involving the development of a safety controller for a manufacturing work cell equipped with a collaborative robot.
Challenges in the Safety-Security Co-Assurance of Collaborative Industrial Robots
Jul 17, 2020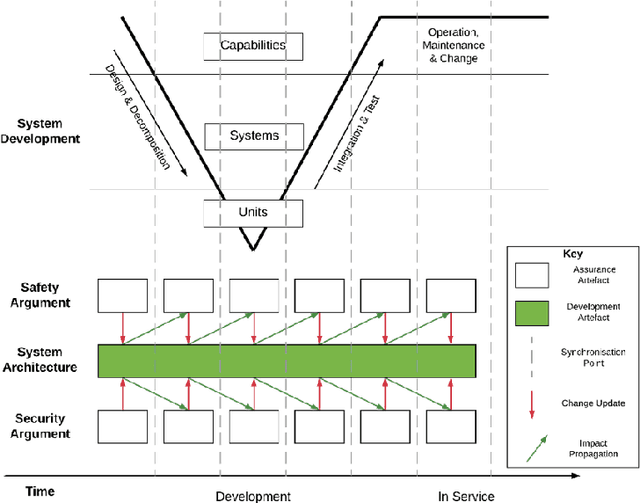
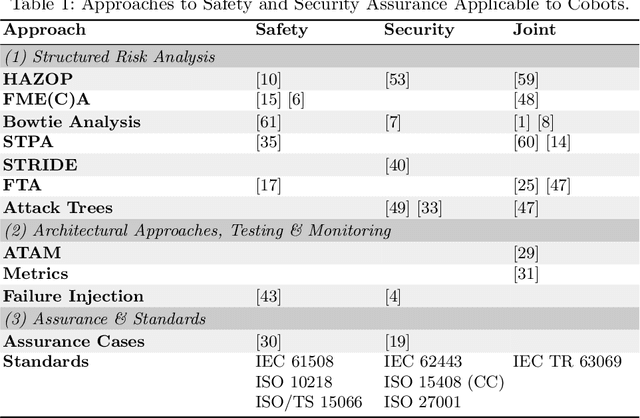
The coordinated assurance of interrelated critical properties, such as system safety and cyber-security, is one of the toughest challenges in critical systems engineering. In this chapter, we summarise approaches to the coordinated assurance of safety and security. Then, we highlight the state of the art and recent challenges in human-robot collaboration in manufacturing both from a safety and security perspective. We conclude with a list of procedural and technological issues to be tackled in the coordinated assurance of collaborative industrial robots.
Deep Learning Inference in Facebook Data Centers: Characterization, Performance Optimizations and Hardware Implications
Nov 29, 2018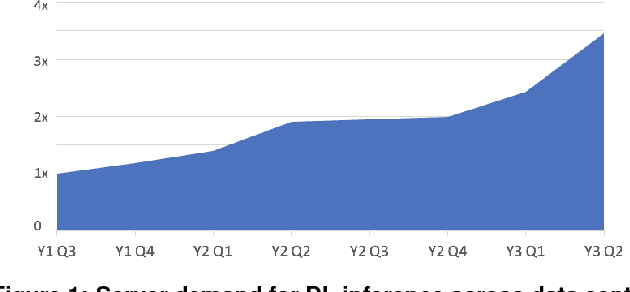
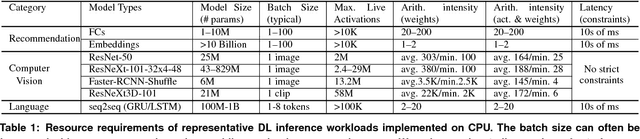
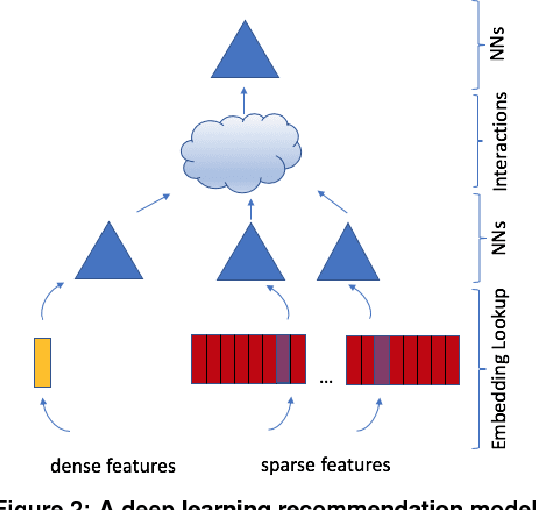
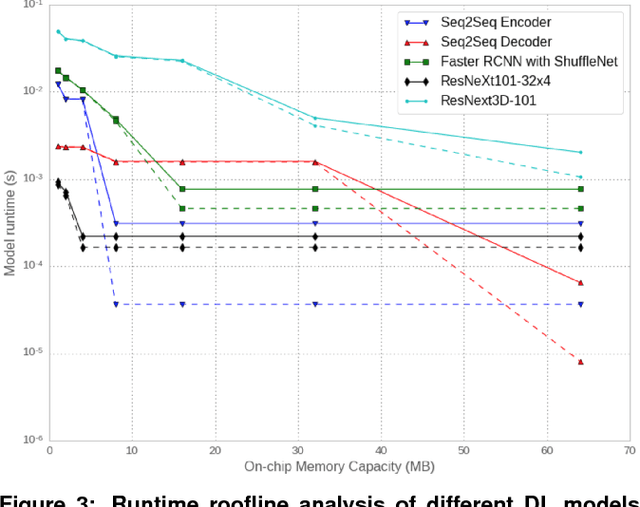
The application of deep learning techniques resulted in remarkable improvement of machine learning models. In this paper provides detailed characterizations of deep learning models used in many Facebook social network services. We present computational characteristics of our models, describe high performance optimizations targeting existing systems, point out their limitations and make suggestions for the future general-purpose/accelerated inference hardware. Also, we highlight the need for better co-design of algorithms, numerics and computing platforms to address the challenges of workloads often run in data centers.
Robot-stated limitations but not intentions promote user assistance
Jun 08, 2016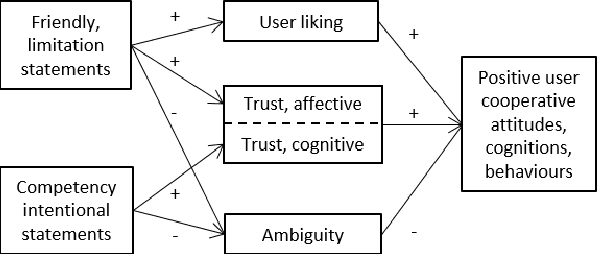
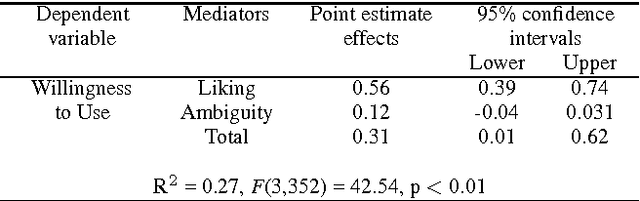
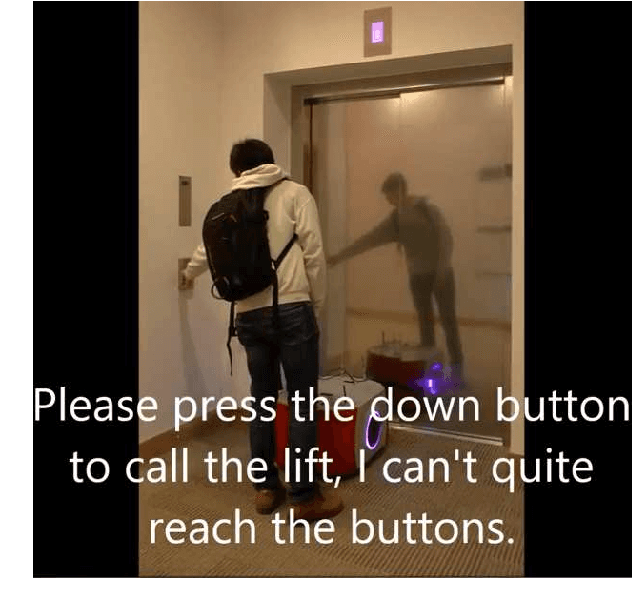
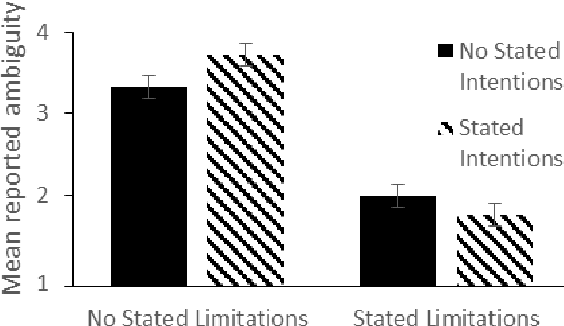
Human-Robot-Interaction (HRI) research is typically built around the premise that the robot serves to assist a human in achieving a human-led goal or shared task. However, there are many circumstances during HRI in which a robot may need the assistance of a human in shared tasks or to achieve goals. We use the ROBO-GUIDE model as a case study, and insights from social psychology, to examine how a robot's personality can impact on user cooperation. A study of 364 participants indicates that individuals may prefer to use likable social robots ahead of those designed to appear more capable; this outcome reflects known social decisions in human interpersonal relationships. This work further demonstrates the value of social psychology in developing social robots and exploring HRI.