 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Social Triad model of Human-Robot Interaction
Aug 08, 2023Despite the increasing interest in trust in human-robot interaction (HRI), there is still relatively little exploration of trust as a social construct in HRI. We propose that integration of useful models of human-human trust from psychology, highlight a potentially overlooked aspect of trust in HRI: a robot's apparent trustworthiness may indirectly relate to the user's relationship with, and opinion of, the individual or organisation deploying the robot. Our Social Triad for HRI model (User, Robot, Deployer), identifies areas for consideration in co-creating trustworthy robotics.
When Robots Interact with Groups, Where Does the Trust Reside?
Aug 28, 2022As robots are introduced to more and more complex scenarios, the issues of trust become more complex as various groups, peoples, and entities begin to interact with a deployed robot. This short paper explores a few scenarios in which the trust of the robot may come into conflict between one (or more) entities or groups that the robot is required to deal with. We also present a scenario concerning the idea of repairing trust through a possible apology.
Impact of robot responsiveness and adult involvement on children's social behaviours in human-robot interaction
Jun 20, 2016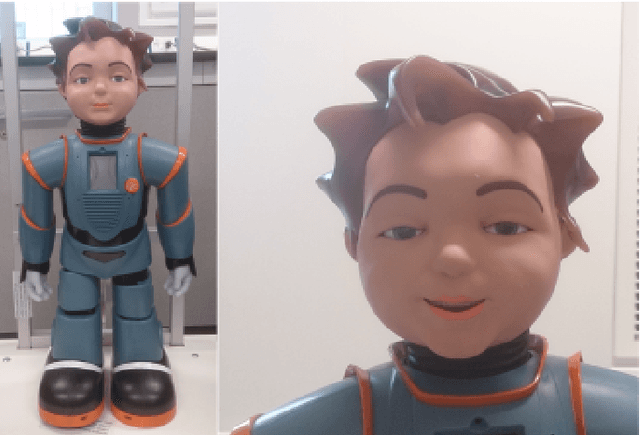
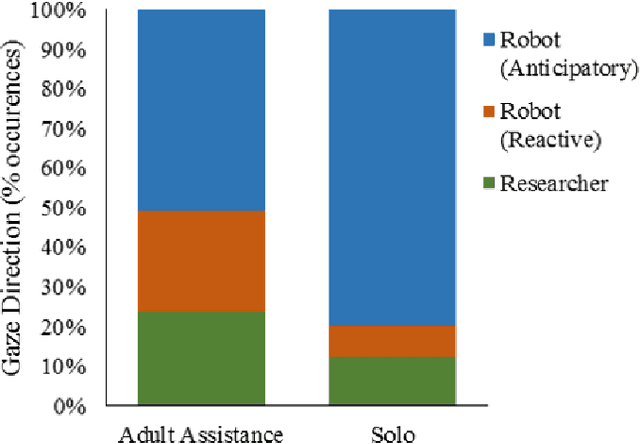
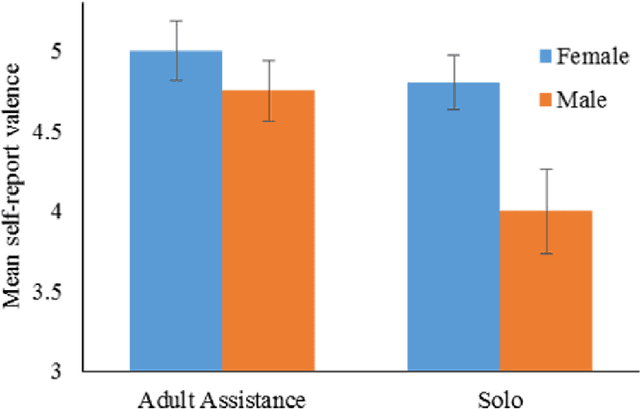
A key challenge in developing engaging social robots is creating convincing, autonomous and responsive agents, which users perceive, and treat, as social beings. As a part of the collaborative project: Expressive Agents for Symbiotic Education and Learning (EASEL), this study examines the impact of autonomous response to children's speech, by the humanoid robot Zeno, on their interactions with it as a social entity. Results indicate that robot autonomy and adult assistance during HRI can substantially influence children's behaviour during interaction and their affect after. Children working with a fully-autonomous, responsive robot demonstrated greater physical activity following robot instruction than those working with a less responsive robot, which required adult assistance to interact with. During dialogue with the robot, children working with the fully-autonomous robot also looked towards the robot in anticipation of its vocalisations on more occasions. In contrast, a less responsive robot, requiring adult assistance to interact with, led to greater self-report positive affect and more occasions of children looking to the robot in response to its vocalisations. We discuss the broader implications of these findings in terms of anthropomorphism of social robots and in relation to the overall project strategy to further the understanding of how interactions with social robots could lead to task-appropriate symbiotic relationships.
Robot-stated limitations but not intentions promote user assistance
Jun 08, 2016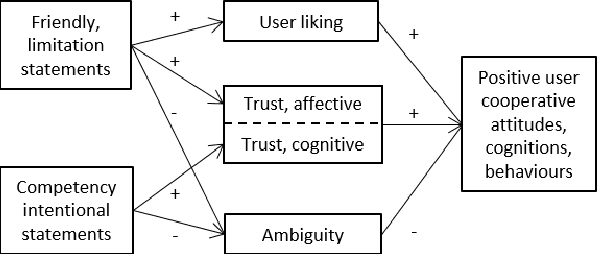
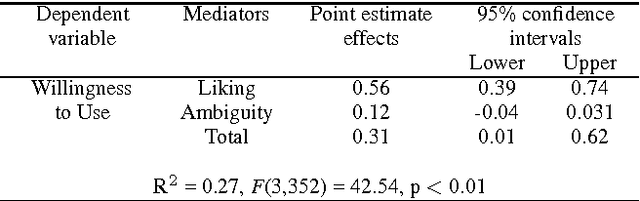
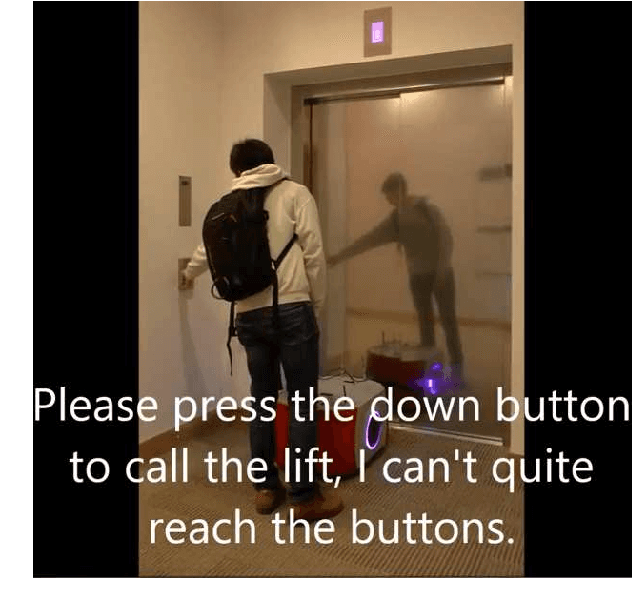
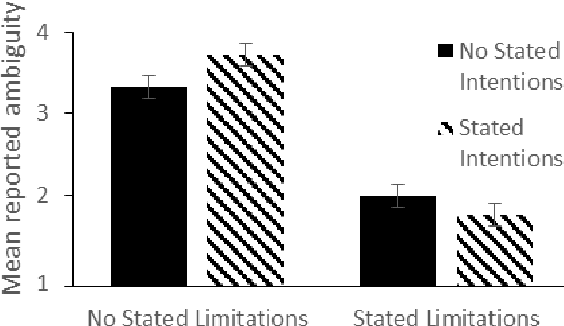
Human-Robot-Interaction (HRI) research is typically built around the premise that the robot serves to assist a human in achieving a human-led goal or shared task. However, there are many circumstances during HRI in which a robot may need the assistance of a human in shared tasks or to achieve goals. We use the ROBO-GUIDE model as a case study, and insights from social psychology, to examine how a robot's personality can impact on user cooperation. A study of 364 participants indicates that individuals may prefer to use likable social robots ahead of those designed to appear more capable; this outcome reflects known social decisions in human interpersonal relationships. This work further demonstrates the value of social psychology in developing social robots and exploring HRI.