 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCausal Explanations from the Geometric Properties of ReLU Neural Networks
May 11, 2026Neural networks have proved an effective means of learning control policies for autonomous systems, but these learned policies are difficult to understand due to the black-box nature of neural networks. This lack of interpretability makes safety assurance for such autonomous systems challenging. The fields of eXplainable Artificial Intelligence (XAI) and eXplainable Reinforcement Learning (XRL) aim to interpret the decision making processes of neural networks and autonomous agents, respectively. In particular, work on causal explanations aims to provide "why" and "why not" explanations for why a model made a given decision. However, most of the work on explainability to date utilises a distilled version of the original model. While this distilled policy is interpretable, it necessarily degrades in performance significantly when compared to the original model, and is not guaranteed to be an accurate reflection of the decision making processes in the original model and as such cannot be used to guarantee its safety. Recent work on understanding the geometry of ReLU neural networks shows that a ReLU network corresponds to a piecewise linear function divided into regions defined by an n-dimensional convex polytope. Through this lens, a neural network can be understood as dividing the input space into distinct regions which apply a single linear function for each output neuron. We show that this geometric representation can be used to generate causal explanations for the network's behaviour similar to previous work, but which extracts rules directly from the geometry of Neural Networks with the ReLU activation function, and is therefore an accurate reflection of the network's behaviour.
SCALOFT: An Initial Approach for Situation Coverage-Based Safety Analysis of an Autonomous Aerial Drone in a Mine Environment
May 27, 2025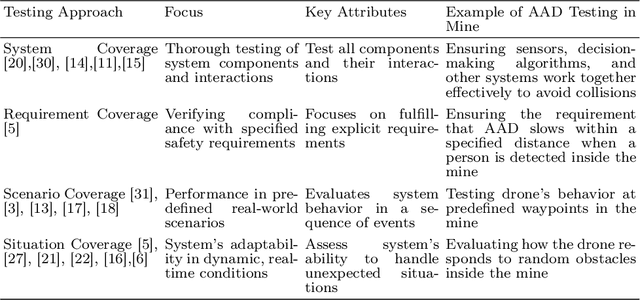
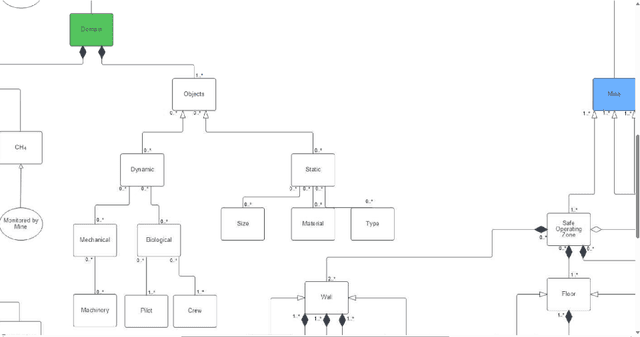
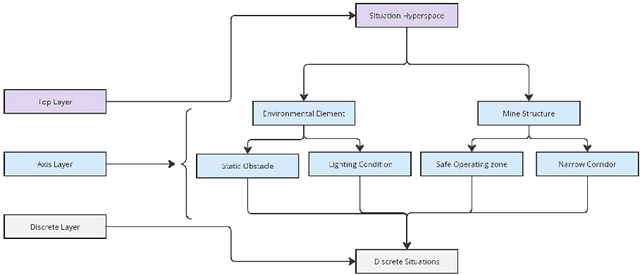
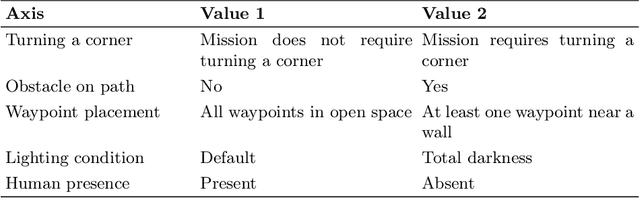
The safety of autonomous systems in dynamic and hazardous environments poses significant challenges. This paper presents a testing approach named SCALOFT for systematically assessing the safety of an autonomous aerial drone in a mine. SCALOFT provides a framework for developing diverse test cases, real-time monitoring of system behaviour, and detection of safety violations. Detected violations are then logged with unique identifiers for detailed analysis and future improvement. SCALOFT helps build a safety argument by monitoring situation coverage and calculating a final coverage measure. We have evaluated the performance of this approach by deliberately introducing seeded faults into the system and assessing whether SCALOFT is able to detect those faults. For a small set of plausible faults, we show that SCALOFT is successful in this.
Intersection focused Situation Coverage-based Verification and Validation Framework for Autonomous Vehicles Implemented in CARLA
Dec 24, 2021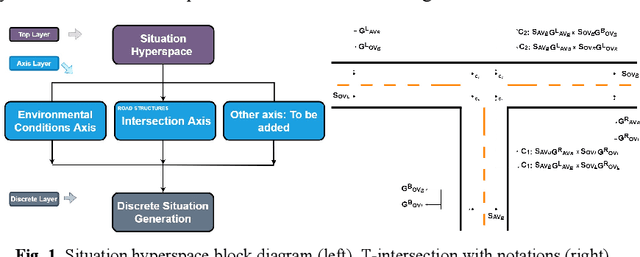
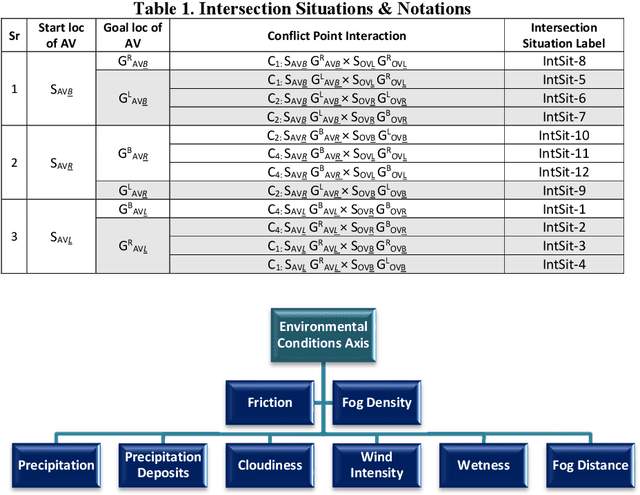
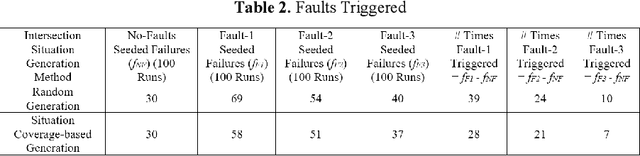
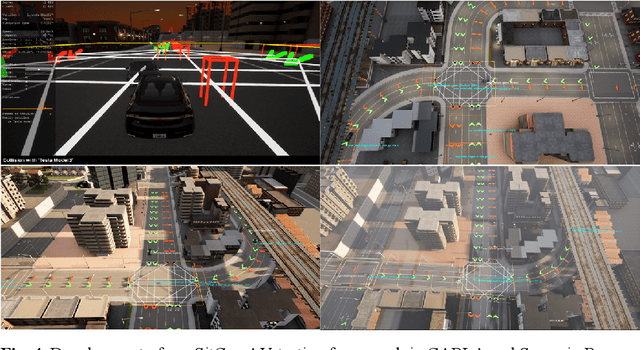
Autonomous Vehicles (AVs) i.e., self-driving cars, operate in a safety critical domain, since errors in the autonomous driving software can lead to huge losses. Statistically, road intersections which are a part of the AVs operational design domain (ODD), have some of the highest accident rates. Hence, testing AVs to the limits on road intersections and assuring their safety on road intersections is pertinent, and thus the focus of this paper. We present a situation coverage-based (SitCov) AV-testing framework for the verification and validation (V&V) and safety assurance of AVs, developed in an open-source AV simulator named CARLA. The SitCov AV-testing framework focuses on vehicle-to-vehicle interaction on a road intersection under different environmental and intersection configuration situations, using situation coverage criteria for automatic test suite generation for safety assurance of AVs. We have developed an ontology for intersection situations, and used it to generate a situation hyperspace i.e., the space of all possible situations arising from that ontology. For the evaluation of our SitCov AV-testing framework, we have seeded multiple faults in our ego AV, and compared situation coverage based and random situation generation. We have found that both generation methodologies trigger around the same number of seeded faults, but the situation coverage-based generation tells us a lot more about the weaknesses of the autonomous driving algorithm of our ego AV, especially in edge-cases. Our code is publicly available online, anyone can use our SitCov AV-testing framework and use it or build further on top of it. This paper aims to contribute to the domain of V&V and development of AVs, not only from a theoretical point of view, but also from the viewpoint of an open-source software contribution and releasing a flexible/effective tool for V&V and development of AVs.
Verified Synthesis of Optimal Safety Controllers for Human-Robot Collaboration
Jun 11, 2021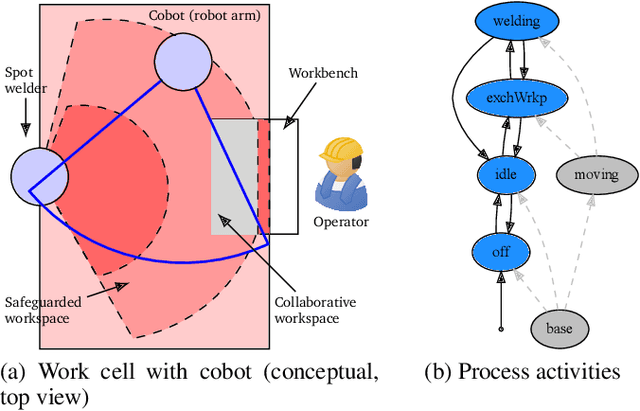
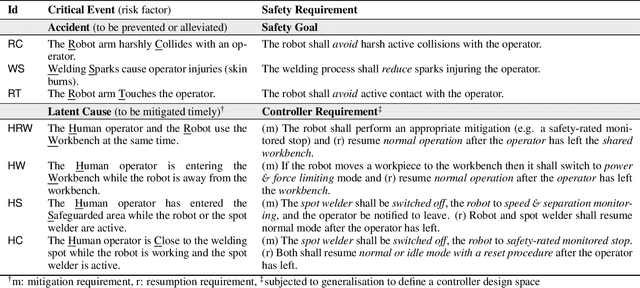
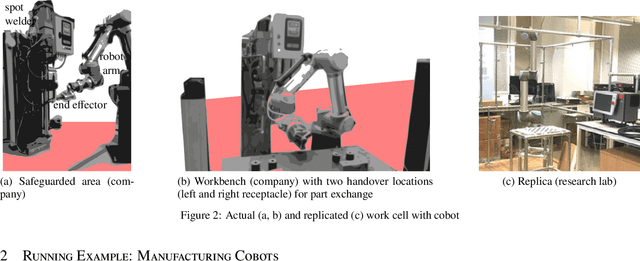
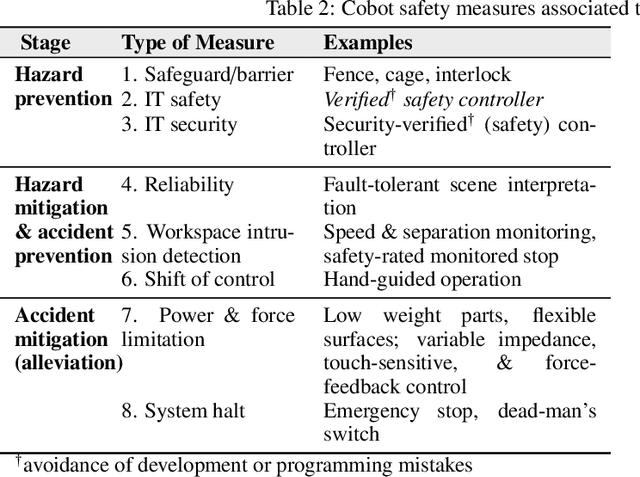
We present a tool-supported approach for the synthesis, verification and validation of the control software responsible for the safety of the human-robot interaction in manufacturing processes that use collaborative robots. In human-robot collaboration, software-based safety controllers are used to improve operational safety, e.g., by triggering shutdown mechanisms or emergency stops to avoid accidents. Complex robotic tasks and increasingly close human-robot interaction pose new challenges to controller developers and certification authorities. Key among these challenges is the need to assure the correctness of safety controllers under explicit (and preferably weak) assumptions. Our controller synthesis, verification and validation approach is informed by the process, risk analysis, and relevant safety regulations for the target application. Controllers are selected from a design space of feasible controllers according to a set of optimality criteria, are formally verified against correctness criteria, and are translated into executable code and validated in a digital twin. The resulting controller can detect the occurrence of hazards, move the process into a safe state, and, in certain circumstances, return the process to an operational state from which it can resume its original task. We show the effectiveness of our software engineering approach through a case study involving the development of a safety controller for a manufacturing work cell equipped with a collaborative robot.
Coverage based testing for V&V and Safety Assurance of Self-driving Autonomous Vehicles: A Systematic Literature Review
Mar 07, 2021
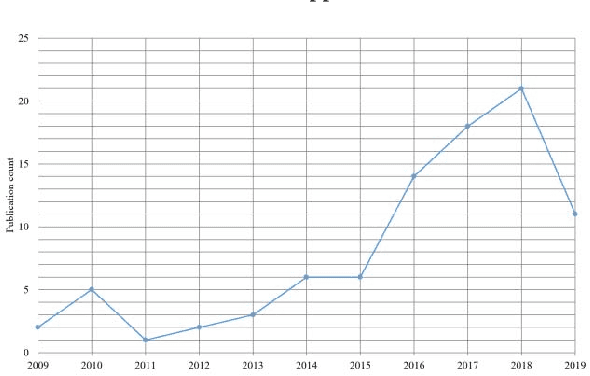
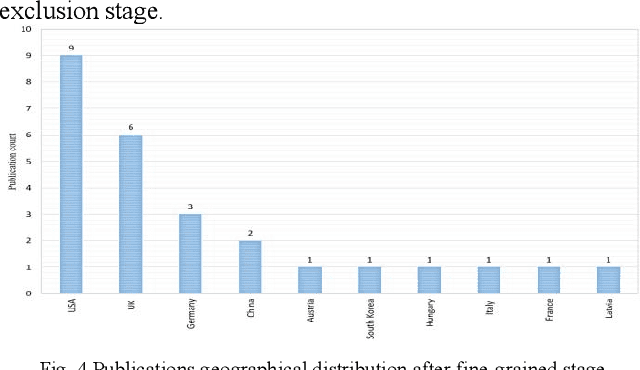
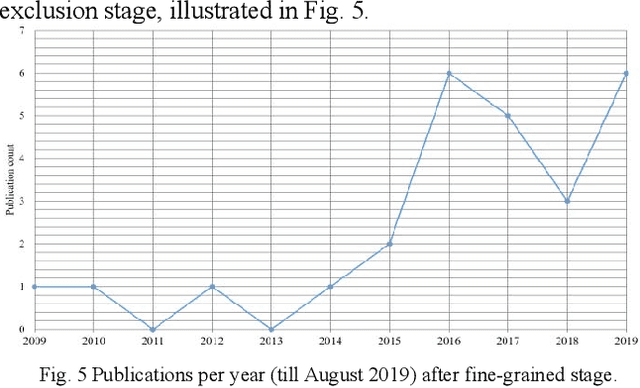
Self-driving Autonomous Vehicles (SAVs) are gaining more interest each passing day by the industry as well as the general public. Tech and automobile companies are investing huge amounts of capital in research and development of SAVs to make sure they have a head start in the SAV market in the future. One of the major hurdles in the way of SAVs making it to the public roads is the lack of confidence of public in the safety aspect of SAVs. In order to assure safety and provide confidence to the public in the safety of SAVs, researchers around the world have used coverage-based testing for Verification and Validation (V&V) and safety assurance of SAVs. The objective of this paper is to investigate the coverage criteria proposed and coverage maximizing techniques used by researchers in the last decade up till now, to assure safety of SAVs. We conduct a Systematic Literature Review (SLR) for this investigation in our paper. We present a classification of existing research based on the coverage criteria used. Several research gaps and research directions are also provided in this SLR to enable further research in this domain. This paper provides a body of knowledge in the domain of safety assurance of SAVs. We believe the results of this SLR will be helpful in the progression of V&V and safety assurance of SAVs.