 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntersection focused Situation Coverage-based Verification and Validation Framework for Autonomous Vehicles Implemented in CARLA
Dec 24, 2021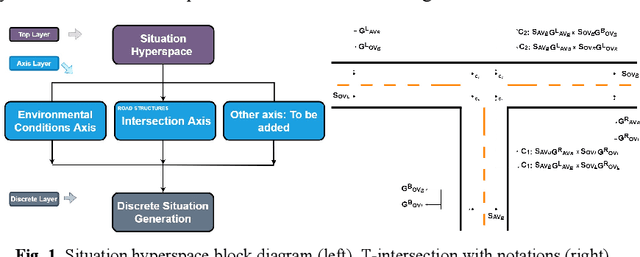
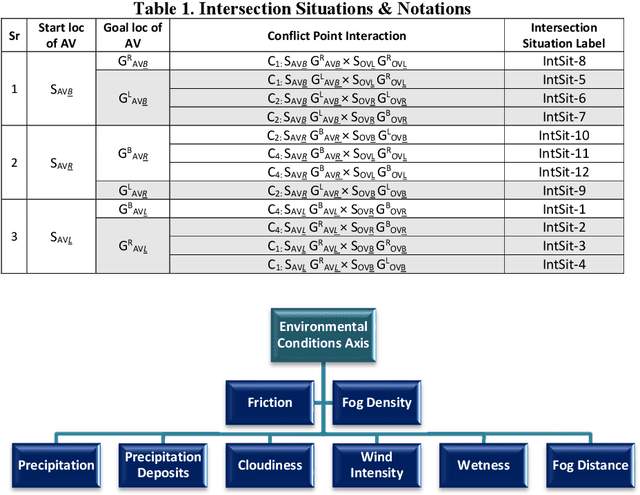
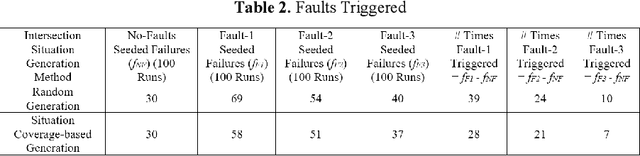
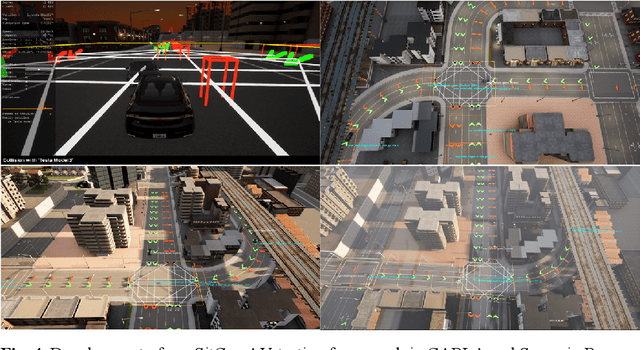
Autonomous Vehicles (AVs) i.e., self-driving cars, operate in a safety critical domain, since errors in the autonomous driving software can lead to huge losses. Statistically, road intersections which are a part of the AVs operational design domain (ODD), have some of the highest accident rates. Hence, testing AVs to the limits on road intersections and assuring their safety on road intersections is pertinent, and thus the focus of this paper. We present a situation coverage-based (SitCov) AV-testing framework for the verification and validation (V&V) and safety assurance of AVs, developed in an open-source AV simulator named CARLA. The SitCov AV-testing framework focuses on vehicle-to-vehicle interaction on a road intersection under different environmental and intersection configuration situations, using situation coverage criteria for automatic test suite generation for safety assurance of AVs. We have developed an ontology for intersection situations, and used it to generate a situation hyperspace i.e., the space of all possible situations arising from that ontology. For the evaluation of our SitCov AV-testing framework, we have seeded multiple faults in our ego AV, and compared situation coverage based and random situation generation. We have found that both generation methodologies trigger around the same number of seeded faults, but the situation coverage-based generation tells us a lot more about the weaknesses of the autonomous driving algorithm of our ego AV, especially in edge-cases. Our code is publicly available online, anyone can use our SitCov AV-testing framework and use it or build further on top of it. This paper aims to contribute to the domain of V&V and development of AVs, not only from a theoretical point of view, but also from the viewpoint of an open-source software contribution and releasing a flexible/effective tool for V&V and development of AVs.
Coverage based testing for V&V and Safety Assurance of Self-driving Autonomous Vehicles: A Systematic Literature Review
Mar 07, 2021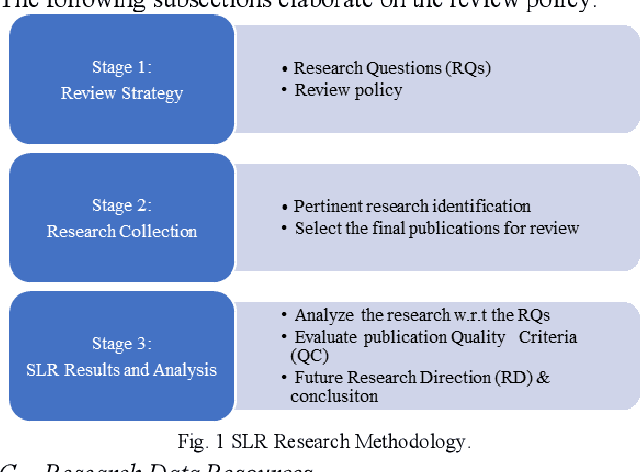
Self-driving Autonomous Vehicles (SAVs) are gaining more interest each passing day by the industry as well as the general public. Tech and automobile companies are investing huge amounts of capital in research and development of SAVs to make sure they have a head start in the SAV market in the future. One of the major hurdles in the way of SAVs making it to the public roads is the lack of confidence of public in the safety aspect of SAVs. In order to assure safety and provide confidence to the public in the safety of SAVs, researchers around the world have used coverage-based testing for Verification and Validation (V&V) and safety assurance of SAVs. The objective of this paper is to investigate the coverage criteria proposed and coverage maximizing techniques used by researchers in the last decade up till now, to assure safety of SAVs. We conduct a Systematic Literature Review (SLR) for this investigation in our paper. We present a classification of existing research based on the coverage criteria used. Several research gaps and research directions are also provided in this SLR to enable further research in this domain. This paper provides a body of knowledge in the domain of safety assurance of SAVs. We believe the results of this SLR will be helpful in the progression of V&V and safety assurance of SAVs.
State Space System Modelling of a Quad Copter UAV
Sep 13, 2019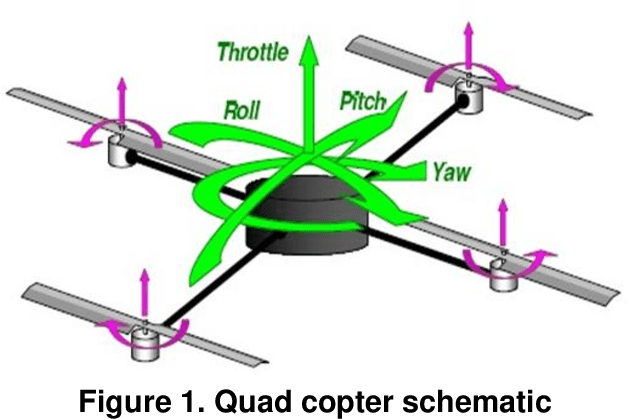
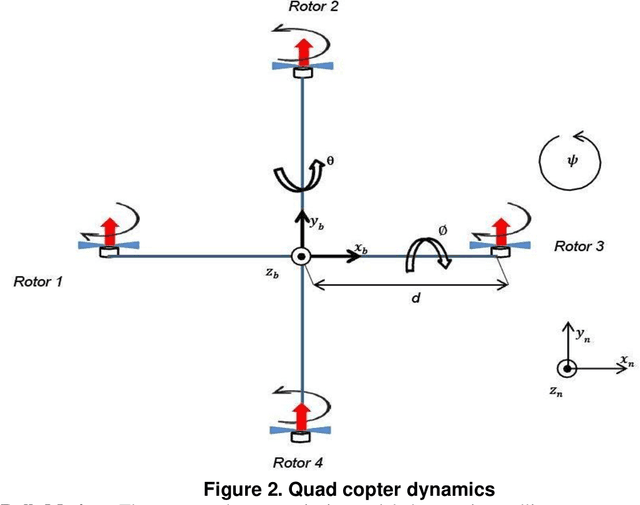
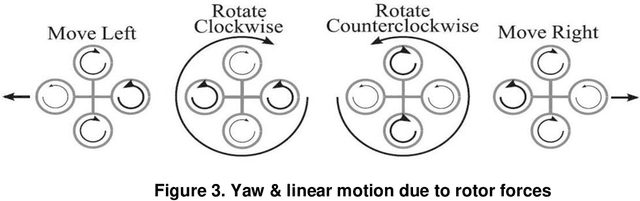
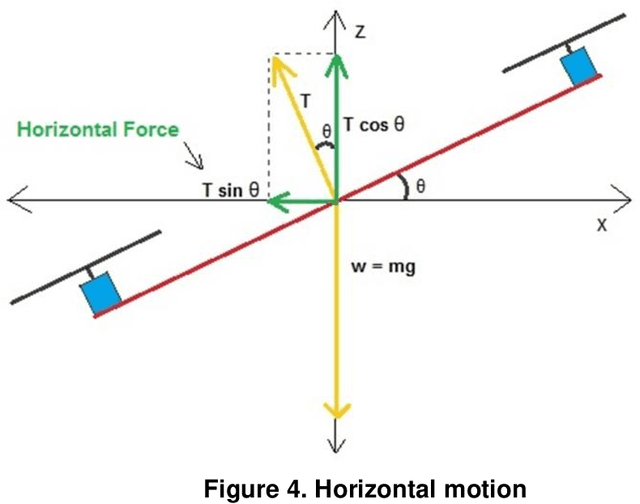
In this paper, a linear mathematical model for a quad copter unmanned aerial vehicle (UAV) is derived. The three degrees of freedom (3DOF) and six degrees of freedom (6DOF) quad copter state-space models are developed starting from basic Newtonian equations. These state space models are very important to control the quad copter system which is inherently dynamically unstable.
Potentially Guided Bidirectionalized RRT* for Fast Optimal Path Planning in Cluttered Environments
Jul 22, 2018
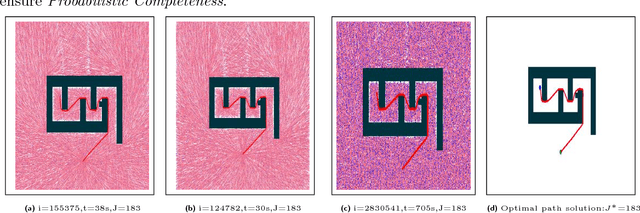
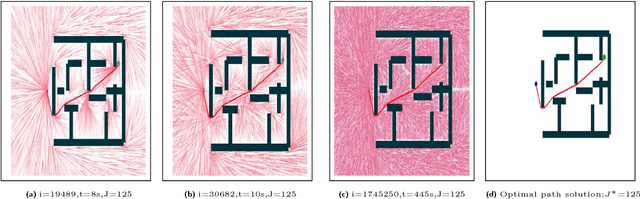
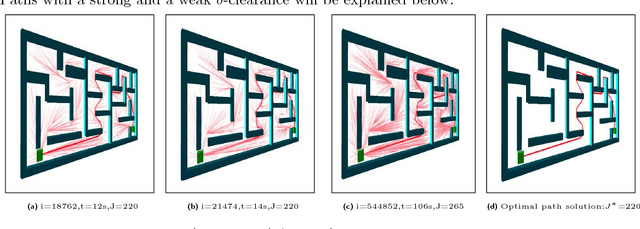
Rapidly-exploring Random Tree star (RRT*) has recently gained immense popularity in the motion planning community as it provides a probabilistically complete and asymptotically optimal solution without requiring the complete information of the obstacle space. In spite of all of its advantages, RRT* converges to an optimal solution very slowly. Hence to improve the convergence rate, its bidirectional variants were introduced, the Bi-directional RRT* (B-RRT*) and Intelligent Bi-directional RRT* (IB-RRT*). However, as both variants perform pure exploration, they tend to suffer in highly cluttered environments. In order to overcome these limitations, we introduce a new concept of potentially guided bidirectional trees in our proposed Potentially Guided Intelligent Bi-directional RRT* (PIB-RRT*) and Potentially Guided Bi-directional RRT* (PB-RRT*). The proposed algorithms greatly improve the convergence rate and have a more efficient memory utilization. Theoretical and experimental evaluation of the proposed algorithms have been made and compared to the latest state of the art motion planning algorithms under different challenging environmental conditions and have proven their remarkable improvement in efficiency and convergence rate.