 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePotentially Guided Bidirectionalized RRT* for Fast Optimal Path Planning in Cluttered Environments
Jul 22, 2018
Rapidly-exploring Random Tree star (RRT*) has recently gained immense popularity in the motion planning community as it provides a probabilistically complete and asymptotically optimal solution without requiring the complete information of the obstacle space. In spite of all of its advantages, RRT* converges to an optimal solution very slowly. Hence to improve the convergence rate, its bidirectional variants were introduced, the Bi-directional RRT* (B-RRT*) and Intelligent Bi-directional RRT* (IB-RRT*). However, as both variants perform pure exploration, they tend to suffer in highly cluttered environments. In order to overcome these limitations, we introduce a new concept of potentially guided bidirectional trees in our proposed Potentially Guided Intelligent Bi-directional RRT* (PIB-RRT*) and Potentially Guided Bi-directional RRT* (PB-RRT*). The proposed algorithms greatly improve the convergence rate and have a more efficient memory utilization. Theoretical and experimental evaluation of the proposed algorithms have been made and compared to the latest state of the art motion planning algorithms under different challenging environmental conditions and have proven their remarkable improvement in efficiency and convergence rate.
Potential Functions based Sampling Heuristic For Optimal Path Planning
Apr 02, 2017
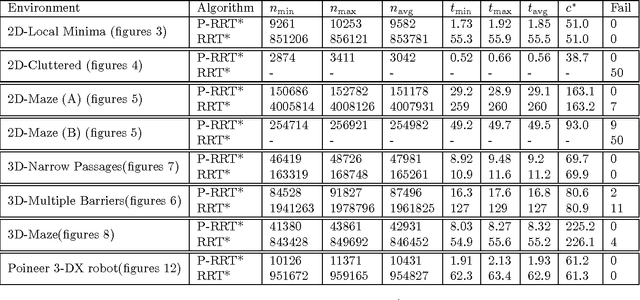


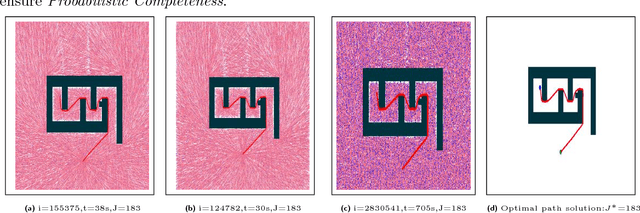
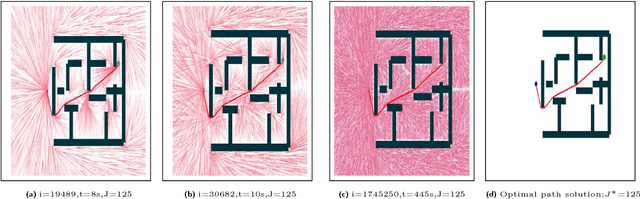
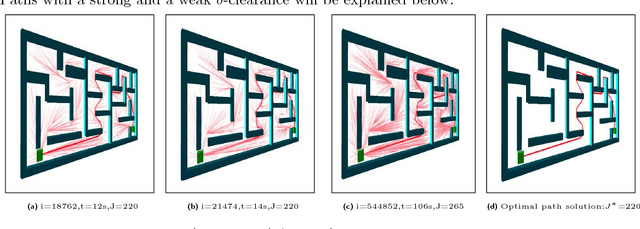
Rapidly-exploring Random Tree Star(RRT*) is a recently proposed extension of Rapidly-exploring Random Tree (RRT) algorithm that provides a collision-free, asymptotically optimal path regardless of obstacle's geometry in a given environment. However, one of the limitations in the RRT* algorithm is slow convergence to optimal path solution. As a result, it consumes high memory as well as time due to a large number of iterations utilised in achieving optimal path solution. To overcome these limitations, we propose the Potential Function Based-RRT* (P-RRT*) that incorporates the Artificial Potential Field Algorithm in RRT*. The proposed algorithm allows a considerable decrease in the number of iterations and thus leads to more efficient memory utilization and an accelerated convergence rate. In order to illustrate the usefulness of the proposed algorithm in terms of space execution and convergence rate, this paper presents rigorous simulation based comparisons between the proposed techniques and RRT* under different environmental conditions. Moreover, both algorithms are also tested and compared under non-holonomic differential constraints.
* This paper introduces a novel algorithm called P-RRT*. The work has been published in Springer Autonomous Robots Journal
Intelligent bidirectional rapidly-exploring random trees for optimal motion planning in complex cluttered environments
Mar 27, 2017
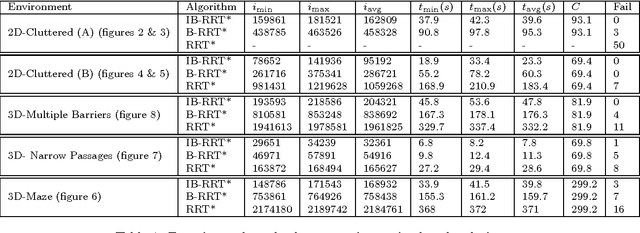


The sampling based motion planning algorithm known as Rapidly-exploring Random Trees (RRT) has gained the attention of many researchers due to their computational efficiency and effectiveness. Recently, a variant of RRT called RRT* has been proposed that ensures asymptotic optimality. Subsequently its bidirectional version has also been introduced in the literature known as Bidirectional-RRT* (B-RRT*). We introduce a new variant called Intelligent Bidirectional-RRT* (IB-RRT*) which is an improved variant of the optimal RRT* and bidirectional version of RRT* (B-RRT*) algorithms and is specially designed for complex cluttered environments. IB-RRT* utilizes the bidirectional trees approach and introduces intelligent sample insertion heuristic for fast convergence to the optimal path solution using uniform sampling heuristics. The proposed algorithm is evaluated theoretically and experimental results are presented that compares IB-RRT* with RRT* and B-RRT*. Moreover, experimental results demonstrate the superior efficiency of IB-RRT* in comparison with RRT* and B-RRT in complex cluttered environments.
* The article is published in Elsevier Journal of Robotics and Autonomous Systems