Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeState Space System Modelling of a Quad Copter UAV
Sep 13, 2019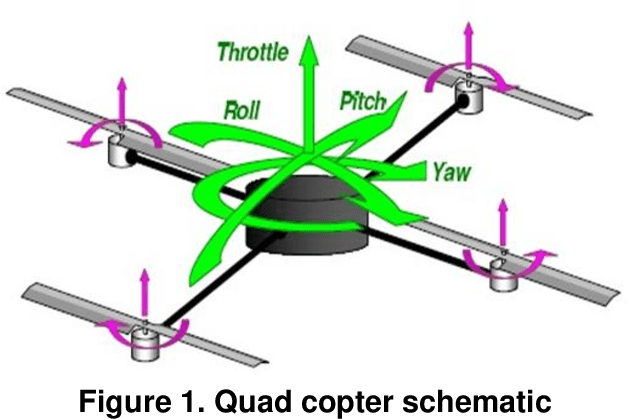
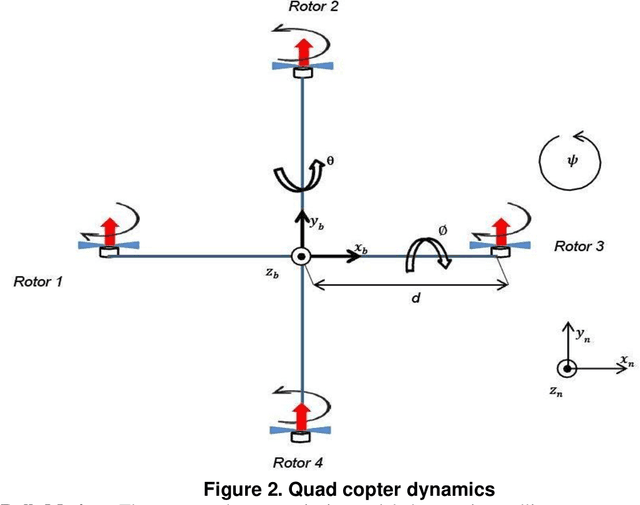
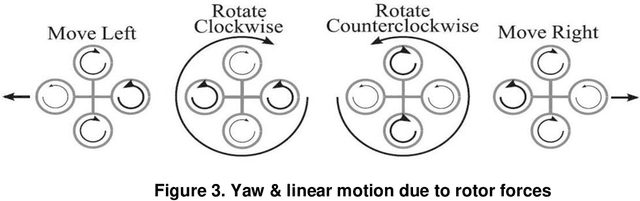
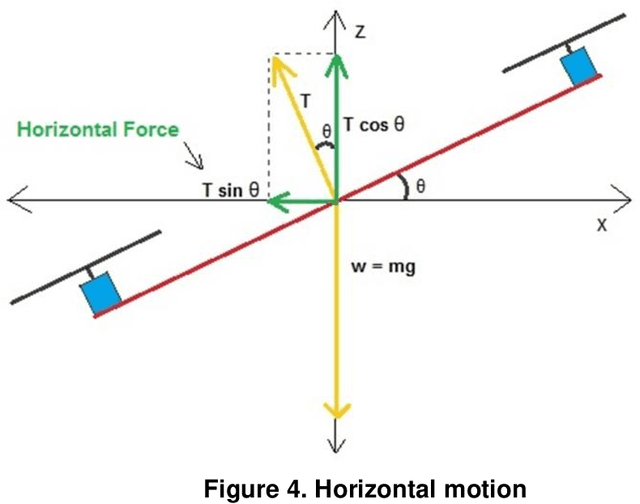
In this paper, a linear mathematical model for a quad copter unmanned aerial vehicle (UAV) is derived. The three degrees of freedom (3DOF) and six degrees of freedom (6DOF) quad copter state-space models are developed starting from basic Newtonian equations. These state space models are very important to control the quad copter system which is inherently dynamically unstable.
* This is the full version of our paper "State Space System Modelling
of a Quad Copter UAV"
Via