 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntersection focused Situation Coverage-based Verification and Validation Framework for Autonomous Vehicles Implemented in CARLA
Paper and Code
Dec 24, 2021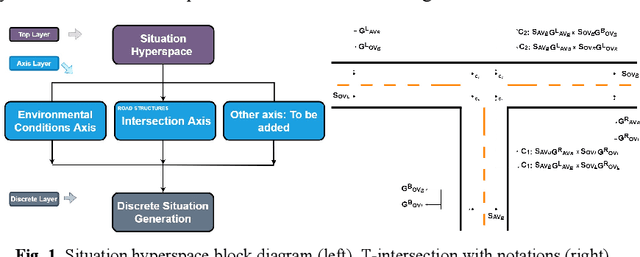
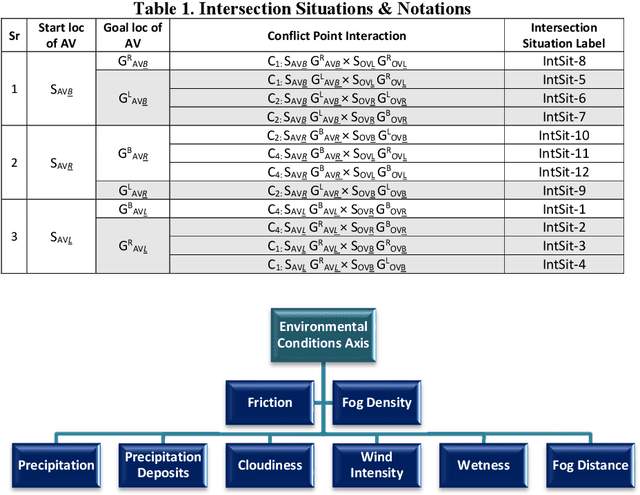
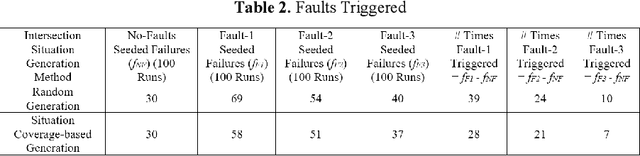
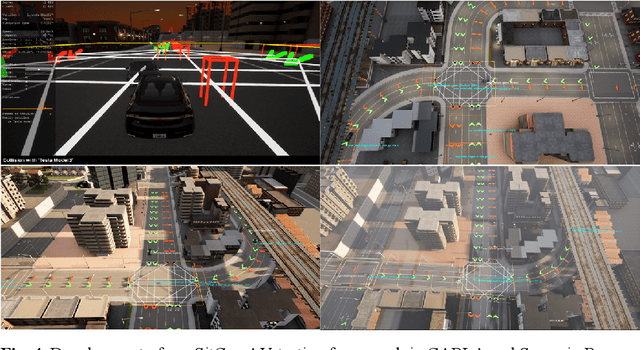
Autonomous Vehicles (AVs) i.e., self-driving cars, operate in a safety critical domain, since errors in the autonomous driving software can lead to huge losses. Statistically, road intersections which are a part of the AVs operational design domain (ODD), have some of the highest accident rates. Hence, testing AVs to the limits on road intersections and assuring their safety on road intersections is pertinent, and thus the focus of this paper. We present a situation coverage-based (SitCov) AV-testing framework for the verification and validation (V&V) and safety assurance of AVs, developed in an open-source AV simulator named CARLA. The SitCov AV-testing framework focuses on vehicle-to-vehicle interaction on a road intersection under different environmental and intersection configuration situations, using situation coverage criteria for automatic test suite generation for safety assurance of AVs. We have developed an ontology for intersection situations, and used it to generate a situation hyperspace i.e., the space of all possible situations arising from that ontology. For the evaluation of our SitCov AV-testing framework, we have seeded multiple faults in our ego AV, and compared situation coverage based and random situation generation. We have found that both generation methodologies trigger around the same number of seeded faults, but the situation coverage-based generation tells us a lot more about the weaknesses of the autonomous driving algorithm of our ego AV, especially in edge-cases. Our code is publicly available online, anyone can use our SitCov AV-testing framework and use it or build further on top of it. This paper aims to contribute to the domain of V&V and development of AVs, not only from a theoretical point of view, but also from the viewpoint of an open-source software contribution and releasing a flexible/effective tool for V&V and development of AVs.