 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnsemble of Pre-Trained Models for Long-Tailed Trajectory Prediction
Sep 17, 2025This work explores the application of ensemble modeling to the multidimensional regression problem of trajectory prediction for vehicles in urban environments. As newer and bigger state-of-the-art prediction models for autonomous driving continue to emerge, an important open challenge is the problem of how to combine the strengths of these big models without the need for costly re-training. We show how, perhaps surprisingly, combining state-of-the-art deep learning models out-of-the-box (without retraining or fine-tuning) with a simple confidence-weighted average method can enhance the overall prediction. Indeed, while combining trajectory prediction models is not straightforward, this simple approach enhances performance by 10% over the best prediction model, especially in the long-tailed metrics. We show that this performance improvement holds on both the NuScenes and Argoverse datasets, and that these improvements are made across the dataset distribution. The code for our work is open source.
MinkOcc: Towards real-time label-efficient semantic occupancy prediction
Apr 03, 2025



Developing 3D semantic occupancy prediction models often relies on dense 3D annotations for supervised learning, a process that is both labor and resource-intensive, underscoring the need for label-efficient or even label-free approaches. To address this, we introduce MinkOcc, a multi-modal 3D semantic occupancy prediction framework for cameras and LiDARs that proposes a two-step semi-supervised training procedure. Here, a small dataset of explicitly 3D annotations warm-starts the training process; then, the supervision is continued by simpler-to-annotate accumulated LiDAR sweeps and images -- semantically labelled through vision foundational models. MinkOcc effectively utilizes these sensor-rich supervisory cues and reduces reliance on manual labeling by 90\% while maintaining competitive accuracy. In addition, the proposed model incorporates information from LiDAR and camera data through early fusion and leverages sparse convolution networks for real-time prediction. With its efficiency in both supervision and computation, we aim to extend MinkOcc beyond curated datasets, enabling broader real-world deployment of 3D semantic occupancy prediction in autonomous driving.
Generating Causal Explanations of Vehicular Agent Behavioural Interactions with Learnt Reward Profiles
Mar 18, 2025


Transparency and explainability are important features that responsible autonomous vehicles should possess, particularly when interacting with humans, and causal reasoning offers a strong basis to provide these qualities. However, even if one assumes agents act to maximise some concept of reward, it is difficult to make accurate causal inferences of agent planning without capturing what is of importance to the agent. Thus our work aims to learn a weighting of reward metrics for agents such that explanations for agent interactions can be causally inferred. We validate our approach quantitatively and qualitatively across three real-world driving datasets, demonstrating a functional improvement over previous methods and competitive performance across evaluation metrics.
CERES: Critical-Event Reconstruction via Temporal Scene Graph Completion
Oct 17, 2024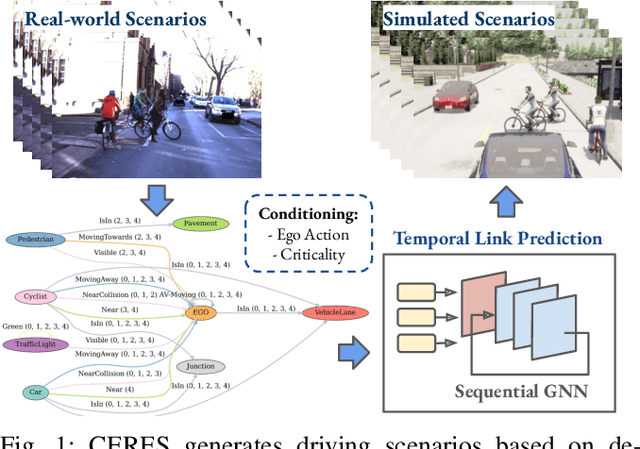

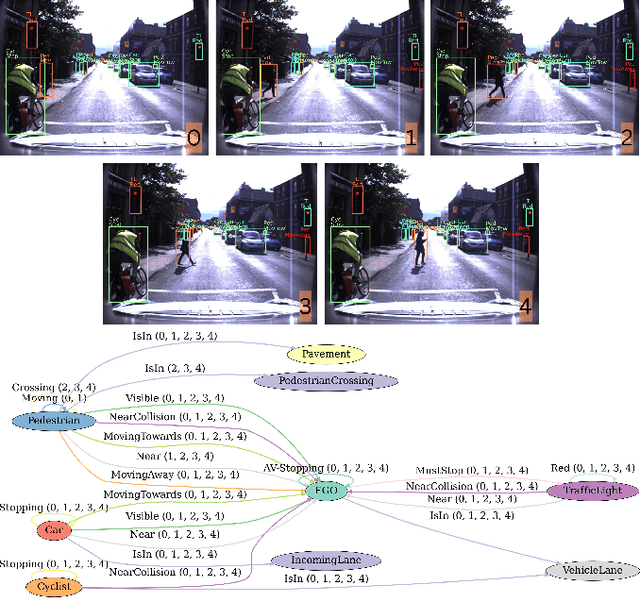
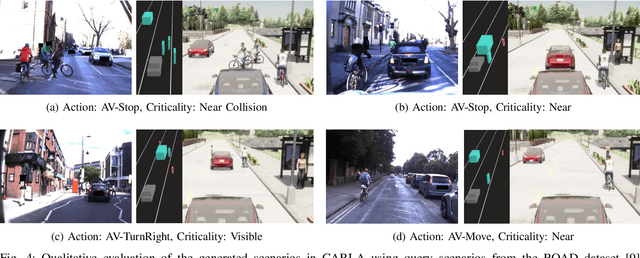
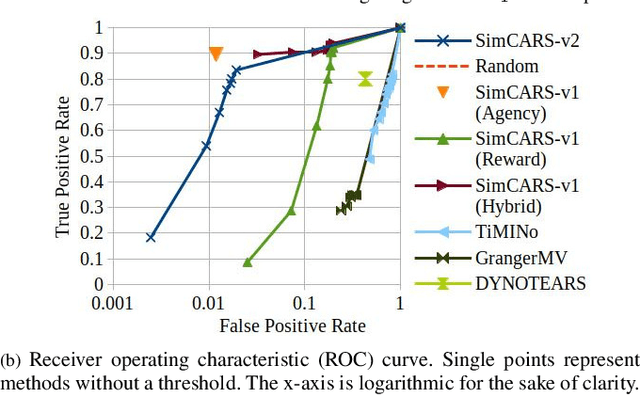
This paper proposes a method for on-demand scenario generation in simulation, grounded on real-world data. Evaluating the behaviour of Autonomous Vehicles (AVs) in both safety-critical and regular scenarios is essential for assessing their robustness before real-world deployment. By integrating scenarios derived from real-world datasets into the simulation, we enhance the plausibility and validity of testing sets. This work introduces a novel approach that employs temporal scene graphs to capture evolving spatiotemporal relationships among scene entities from a real-world dataset, enabling the generation of dynamic scenarios in simulation through Graph Neural Networks (GNNs). User-defined action and criticality conditioning are used to ensure flexible, tailored scenario creation. Our model significantly outperforms the benchmarks in accurately predicting links corresponding to the requested scenarios. We further evaluate the validity and compatibility of our generated scenarios in an off-the-shelf simulator.
NAR-*ICP: Neural Execution of Classical ICP-based Pointcloud Registration Algorithms
Oct 14, 2024



This study explores the intersection of neural networks and classical robotics algorithms through the Neural Algorithmic Reasoning (NAR) framework, allowing to train neural networks to effectively reason like classical robotics algorithms by learning to execute them. Algorithms are integral to robotics and safety-critical applications due to their predictable and consistent performance through logical and mathematical principles. In contrast, while neural networks are highly adaptable, handling complex, high-dimensional data and generalising across tasks, they often lack interpretability and transparency in their internal computations. We propose a Graph Neural Network (GNN)-based learning framework, NAR-*ICP, which learns the intermediate algorithmic steps of classical ICP-based pointcloud registration algorithms, and extend the CLRS Algorithmic Reasoning Benchmark with classical robotics perception algorithms. We evaluate our approach across diverse datasets, from real-world to synthetic, demonstrating its flexibility in handling complex and noisy inputs, along with its potential to be used as part of a larger learning system. Our results indicate that our method achieves superior performance across all benchmarks and datasets, consistently surpassing even the algorithms it has been trained on, further demonstrating its ability to generalise beyond the capabilities of traditional algorithms.
A Transparency Paradox? Investigating the Impact of Explanation Specificity and Autonomous Vehicle Perceptual Inaccuracies on Passengers
Aug 16, 2024Transparency in automated systems could be afforded through the provision of intelligible explanations. While transparency is desirable, might it lead to catastrophic outcomes (such as anxiety), that could outweigh its benefits? It's quite unclear how the specificity of explanations (level of transparency) influences recipients, especially in autonomous driving (AD). In this work, we examined the effects of transparency mediated through varying levels of explanation specificity in AD. We first extended a data-driven explainer model by adding a rule-based option for explanation generation in AD, and then conducted a within-subject lab study with 39 participants in an immersive driving simulator to study the effect of the resulting explanations. Specifically, our investigation focused on: (1) how different types of explanations (specific vs. abstract) affect passengers' perceived safety, anxiety, and willingness to take control of the vehicle when the vehicle perception system makes erroneous predictions; and (2) the relationship between passengers' behavioural cues and their feelings during the autonomous drives. Our findings showed that passengers felt safer with specific explanations when the vehicle's perception system had minimal errors, while abstract explanations that hid perception errors led to lower feelings of safety. Anxiety levels increased when specific explanations revealed perception system errors (high transparency). We found no significant link between passengers' visual patterns and their anxiety levels. Our study suggests that passengers prefer clear and specific explanations (high transparency) when they originate from autonomous vehicles (AVs) with optimal perceptual accuracy.
S-RAF: A Simulation-Based Robustness Assessment Framework for Responsible Autonomous Driving
Aug 16, 2024



As artificial intelligence (AI) technology advances, ensuring the robustness and safety of AI-driven systems has become paramount. However, varying perceptions of robustness among AI developers create misaligned evaluation metrics, complicating the assessment and certification of safety-critical and complex AI systems such as autonomous driving (AD) agents. To address this challenge, we introduce Simulation-Based Robustness Assessment Framework (S-RAF) for autonomous driving. S-RAF leverages the CARLA Driving simulator to rigorously assess AD agents across diverse conditions, including faulty sensors, environmental changes, and complex traffic situations. By quantifying robustness and its relationship with other safety-critical factors, such as carbon emissions, S-RAF aids developers and stakeholders in building safe and responsible driving agents, and streamlining safety certification processes. Furthermore, S-RAF offers significant advantages, such as reduced testing costs, and the ability to explore edge cases that may be unsafe to test in the real world. The code for this framework is available here: https://github.com/cognitive-robots/rai-leaderboard
From Feature Importance to Natural Language Explanations Using LLMs with RAG
Jul 30, 2024



As machine learning becomes increasingly integral to autonomous decision-making processes involving human interaction, the necessity of comprehending the model's outputs through conversational means increases. Most recently, foundation models are being explored for their potential as post hoc explainers, providing a pathway to elucidate the decision-making mechanisms of predictive models. In this work, we introduce traceable question-answering, leveraging an external knowledge repository to inform the responses of Large Language Models (LLMs) to user queries within a scene understanding task. This knowledge repository comprises contextual details regarding the model's output, containing high-level features, feature importance, and alternative probabilities. We employ subtractive counterfactual reasoning to compute feature importance, a method that entails analysing output variations resulting from decomposing semantic features. Furthermore, to maintain a seamless conversational flow, we integrate four key characteristics - social, causal, selective, and contrastive - drawn from social science research on human explanations into a single-shot prompt, guiding the response generation process. Our evaluation demonstrates that explanations generated by the LLMs encompassed these elements, indicating its potential to bridge the gap between complex model outputs and natural language expressions.
Risk-aware Trajectory Prediction by Incorporating Spatio-temporal Traffic Interaction Analysis
Jul 15, 2024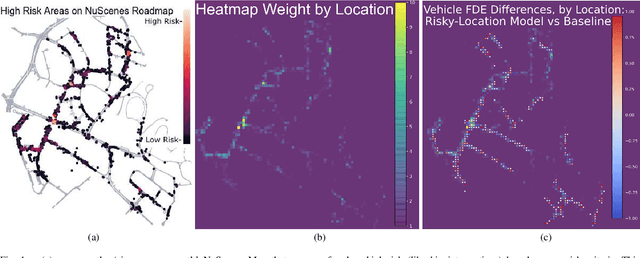
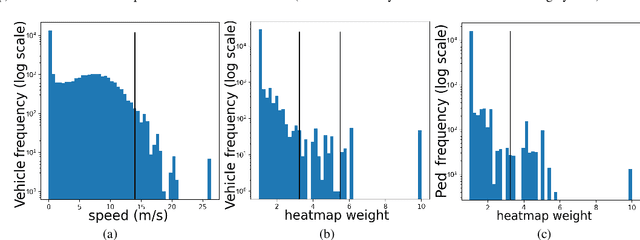
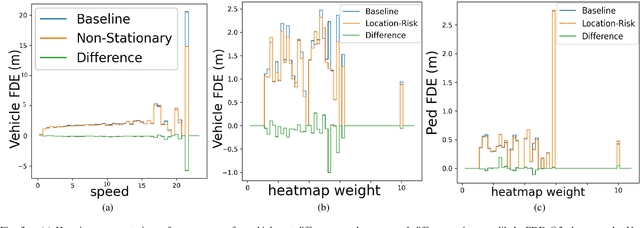

To operate in open-ended environments where humans interact in complex, diverse ways, autonomous robots must learn to predict their behaviour, especially when that behavior is potentially dangerous to other agents or to the robot. However, reducing the risk of accidents requires prior knowledge of where potential collisions may occur and how. Therefore, we propose to gain this information by analyzing locations and speeds that commonly correspond to high-risk interactions within the dataset, and use it within training to generate better predictions in high risk situations. Through these location-based and speed-based re-weighting techniques, we achieve improved overall performance, as measured by most-likely FDE and KDE, as well as improved performance on high-speed vehicles, and vehicles within high-risk locations. 2023 IEEE International Conference on Robotics and Automation (ICRA)
Learning Run-time Safety Monitors for Machine Learning Components
Jun 23, 2024



For machine learning components used as part of autonomous systems (AS) in carrying out critical tasks it is crucial that assurance of the models can be maintained in the face of post-deployment changes (such as changes in the operating environment of the system). A critical part of this is to be able to monitor when the performance of the model at runtime (as a result of changes) poses a safety risk to the system. This is a particularly difficult challenge when ground truth is unavailable at runtime. In this paper we introduce a process for creating safety monitors for ML components through the use of degraded datasets and machine learning. The safety monitor that is created is deployed to the AS in parallel to the ML component to provide a prediction of the safety risk associated with the model output. We demonstrate the viability of our approach through some initial experiments using publicly available speed sign datasets.