 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntrospection in Learned Semantic Scene Graph Localisation
Oct 08, 2025This work investigates how semantics influence localisation performance and robustness in a learned self-supervised, contrastive semantic localisation framework. After training a localisation network on both original and perturbed maps, we conduct a thorough post-hoc introspection analysis to probe whether the model filters environmental noise and prioritises distinctive landmarks over routine clutter. We validate various interpretability methods and present a comparative reliability analysis. Integrated gradients and Attention Weights consistently emerge as the most reliable probes of learned behaviour. A semantic class ablation further reveals an implicit weighting in which frequent objects are often down-weighted. Overall, the results indicate that the model learns noise-robust, semantically salient relations about place definition, thereby enabling explainable registration under challenging visual and structural variations.
CERES: Critical-Event Reconstruction via Temporal Scene Graph Completion
Oct 17, 2024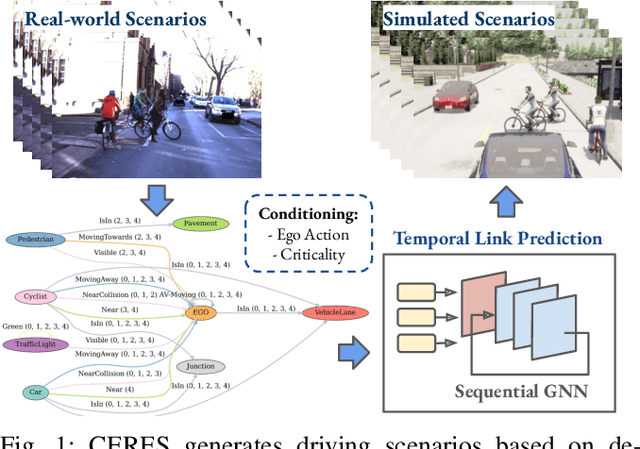

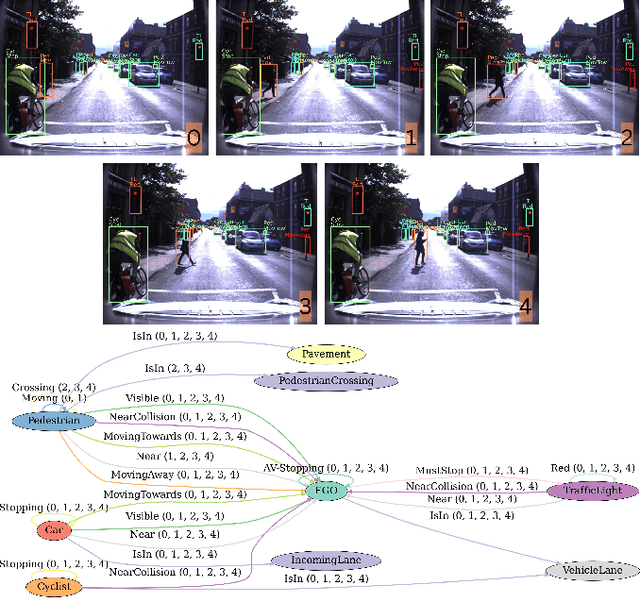
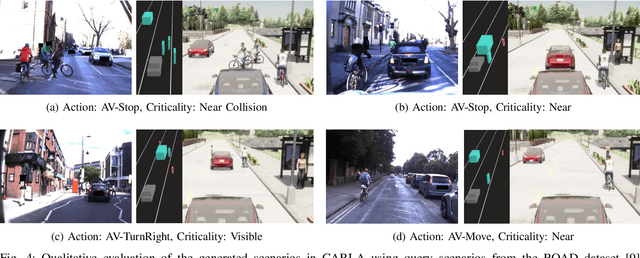
This paper proposes a method for on-demand scenario generation in simulation, grounded on real-world data. Evaluating the behaviour of Autonomous Vehicles (AVs) in both safety-critical and regular scenarios is essential for assessing their robustness before real-world deployment. By integrating scenarios derived from real-world datasets into the simulation, we enhance the plausibility and validity of testing sets. This work introduces a novel approach that employs temporal scene graphs to capture evolving spatiotemporal relationships among scene entities from a real-world dataset, enabling the generation of dynamic scenarios in simulation through Graph Neural Networks (GNNs). User-defined action and criticality conditioning are used to ensure flexible, tailored scenario creation. Our model significantly outperforms the benchmarks in accurately predicting links corresponding to the requested scenarios. We further evaluate the validity and compatibility of our generated scenarios in an off-the-shelf simulator.
NAR-*ICP: Neural Execution of Classical ICP-based Pointcloud Registration Algorithms
Oct 14, 2024



This study explores the intersection of neural networks and classical robotics algorithms through the Neural Algorithmic Reasoning (NAR) framework, allowing to train neural networks to effectively reason like classical robotics algorithms by learning to execute them. Algorithms are integral to robotics and safety-critical applications due to their predictable and consistent performance through logical and mathematical principles. In contrast, while neural networks are highly adaptable, handling complex, high-dimensional data and generalising across tasks, they often lack interpretability and transparency in their internal computations. We propose a Graph Neural Network (GNN)-based learning framework, NAR-*ICP, which learns the intermediate algorithmic steps of classical ICP-based pointcloud registration algorithms, and extend the CLRS Algorithmic Reasoning Benchmark with classical robotics perception algorithms. We evaluate our approach across diverse datasets, from real-world to synthetic, demonstrating its flexibility in handling complex and noisy inputs, along with its potential to be used as part of a larger learning system. Our results indicate that our method achieves superior performance across all benchmarks and datasets, consistently surpassing even the algorithms it has been trained on, further demonstrating its ability to generalise beyond the capabilities of traditional algorithms.
RobotCycle: Assessing Cycling Safety in Urban Environments
Mar 12, 2024



This paper introduces RobotCycle, a novel ongoing project that leverages Autonomous Vehicle (AV) research to investigate how cycling infrastructure influences cyclist behaviour and safety during real-world journeys. The project's requirements were defined in collaboration with key stakeholders (i.e. city planners, cyclists, and policymakers), informing the design of risk and safety metrics and the data collection criteria. We propose a data-driven approach relying on a novel, rich dataset of diverse traffic scenes captured through a custom-designed wearable sensing unit. We extract road-user trajectories and analyse deviations suggesting risk or potentially hazardous interactions in correlation with infrastructural elements in the environment. Driving profiles and trajectory patterns are associated with local road segments, driving conditions, and road-user interactions to predict traffic behaviour and identify critical scenarios. Moreover, leveraging advancements in AV research, the project extracts detailed 3D maps, traffic flow patterns, and trajectory models to provide an in-depth assessment and analysis of the behaviour of all traffic agents. This data can then inform the design of cyclist-friendly road infrastructure, improving road safety and cyclability, as it provides valuable insights for enhancing cyclist protection and promoting sustainable urban mobility.
OORD: The Oxford Offroad Radar Dataset
Mar 05, 2024There is a growing academic interest as well as commercial exploitation of millimetre-wave scanning radar for autonomous vehicle localisation and scene understanding. Although several datasets to support this research area have been released, they are primarily focused on urban or semi-urban environments. Nevertheless, rugged offroad deployments are important application areas which also present unique challenges and opportunities for this sensor technology. Therefore, the Oxford Offroad Radar Dataset (OORD) presents data collected in the rugged Scottish highlands in extreme weather. The radar data we offer to the community are accompanied by GPS/INS reference - to further stimulate research in radar place recognition. In total we release over 90GiB of radar scans as well as GPS and IMU readings by driving a diverse set of four routes over 11 forays, totalling approximately 154km of rugged driving. This is an area increasingly explored in literature, and we therefore present and release examples of recent open-sourced radar place recognition systems and their performance on our dataset. This includes a learned neural network, the weights of which we also release. The data and tools are made freely available to the community at https://oxford-robotics-institute.github.io/oord-dataset.
CC-SGG: Corner Case Scenario Generation using Learned Scene Graphs
Sep 18, 2023


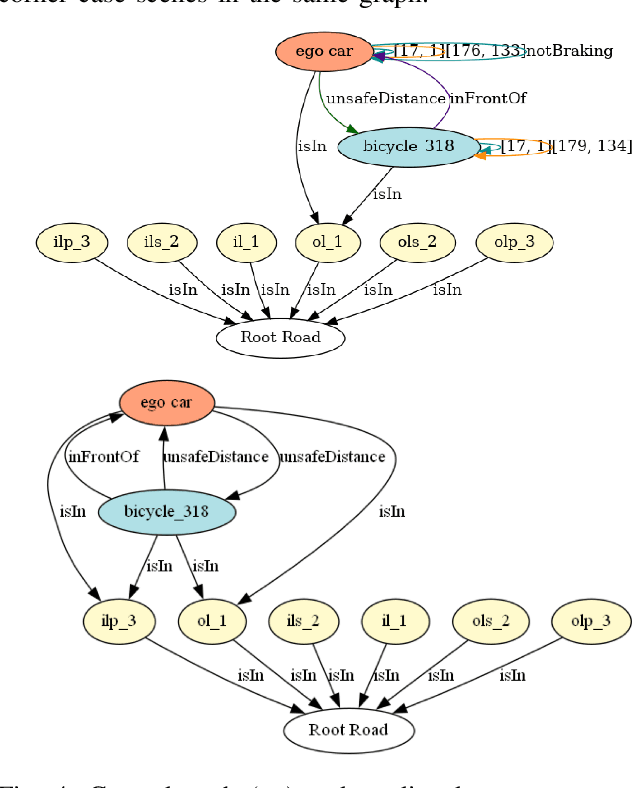
Corner case scenarios are an essential tool for testing and validating the safety of autonomous vehicles (AVs). As these scenarios are often insufficiently present in naturalistic driving datasets, augmenting the data with synthetic corner cases greatly enhances the safe operation of AVs in unique situations. However, the generation of synthetic, yet realistic, corner cases poses a significant challenge. In this work, we introduce a novel approach based on Heterogeneous Graph Neural Networks (HGNNs) to transform regular driving scenarios into corner cases. To achieve this, we first generate concise representations of regular driving scenes as scene graphs, minimally manipulating their structure and properties. Our model then learns to perturb those graphs to generate corner cases using attention and triple embeddings. The input and perturbed graphs are then imported back into the simulation to generate corner case scenarios. Our model successfully learned to produce corner cases from input scene graphs, achieving 89.9% prediction accuracy on our testing dataset. We further validate the generated scenarios on baseline autonomous driving methods, demonstrating our model's ability to effectively create critical situations for the baselines.
Semantic Interpretation and Validation of Graph Attention-based Explanations for GNN Models
Aug 08, 2023



In this work, we propose a methodology for investigating the application of semantic attention to enhance the explainability of Graph Neural Network (GNN)-based models, introducing semantically-informed perturbations and establishing a correlation between predicted feature-importance weights and model accuracy. Graph Deep Learning (GDL) has emerged as a promising field for tasks like scene interpretation, leveraging flexible graph structures to concisely describe complex features and relationships. As traditional explainability methods used in eXplainable AI (XAI) cannot be directly applied to such structures, graph-specific approaches are introduced. Attention mechanisms have demonstrated their efficacy in estimating the importance of input features in deep learning models and thus have been previously employed to provide feature-based explanations for GNN predictions. Building upon these insights, we extend existing attention-based graph-explainability methods investigating the use of attention weights as importance indicators of semantically sorted feature sets. Through analysing the behaviour of predicted attention-weights distribution in correlation with model accuracy, we gain valuable insights into feature importance with respect to the behaviour of the GNN model. We apply our methodology to a lidar pointcloud estimation model successfully identifying key semantic classes that contribute to enhanced performance effectively generating reliable post-hoc semantic explanations.
SEM-GAT: Explainable Semantic Pose Estimation using Learned Graph Attention
Aug 07, 2023This paper proposes a GNN-based method for exploiting semantics and local geometry to guide the identification of reliable pointcloud registration candidates. Semantic and morphological features of the environment serve as key reference points for registration, enabling accurate lidar-based pose estimation. Our novel lightweight static graph structure informs our attention-based keypoint node aggregation GNN network by identifying semantic instance-based relationships, acting as inductive bias to significantly reduce the computational burden of pointcloud registration. By connecting candidate nodes and exploiting cross-graph attention, we identify confidence scores for all potential registration correspondences, estimating the displacement between pointcloud scans. Our pipeline enables introspective analysis of the model's performance by correlating it with the individual contributions of local structures in the environment, providing valuable insights into the system's behaviour. We test our method on the KITTI odometry dataset, achieving competitive accuracy compared to benchmark methods and a higher track smoothness while relying on significantly fewer network parameters.