 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWatching Grass Grow: Long-term Visual Navigation and Mission Planning for Autonomous Biodiversity Monitoring
Apr 16, 2024



We describe a challenging robotics deployment in a complex ecosystem to monitor a rich plant community. The study site is dominated by dynamic grassland vegetation and is thus visually ambiguous and liable to drastic appearance change over the course of a day and especially through the growing season. This dynamism and complexity in appearance seriously impact the stability of the robotics platform, as localisation is a foundational part of that control loop, and so routes must be carefully taught and retaught until autonomy is robust and repeatable. Our system is demonstrated over a 6-week period monitoring the response of grass species to experimental climate change manipulations. We also discuss the applicability of our pipeline to monitor biodiversity in other complex natural settings.
RobotCycle: Assessing Cycling Safety in Urban Environments
Mar 12, 2024



This paper introduces RobotCycle, a novel ongoing project that leverages Autonomous Vehicle (AV) research to investigate how cycling infrastructure influences cyclist behaviour and safety during real-world journeys. The project's requirements were defined in collaboration with key stakeholders (i.e. city planners, cyclists, and policymakers), informing the design of risk and safety metrics and the data collection criteria. We propose a data-driven approach relying on a novel, rich dataset of diverse traffic scenes captured through a custom-designed wearable sensing unit. We extract road-user trajectories and analyse deviations suggesting risk or potentially hazardous interactions in correlation with infrastructural elements in the environment. Driving profiles and trajectory patterns are associated with local road segments, driving conditions, and road-user interactions to predict traffic behaviour and identify critical scenarios. Moreover, leveraging advancements in AV research, the project extracts detailed 3D maps, traffic flow patterns, and trajectory models to provide an in-depth assessment and analysis of the behaviour of all traffic agents. This data can then inform the design of cyclist-friendly road infrastructure, improving road safety and cyclability, as it provides valuable insights for enhancing cyclist protection and promoting sustainable urban mobility.
Team CERBERUS Wins the DARPA Subterranean Challenge: Technical Overview and Lessons Learned
Jul 11, 2022
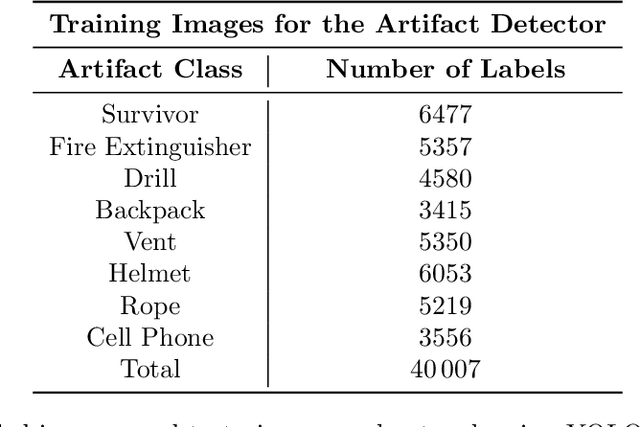
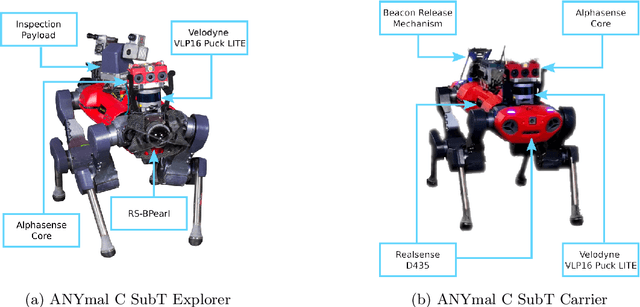
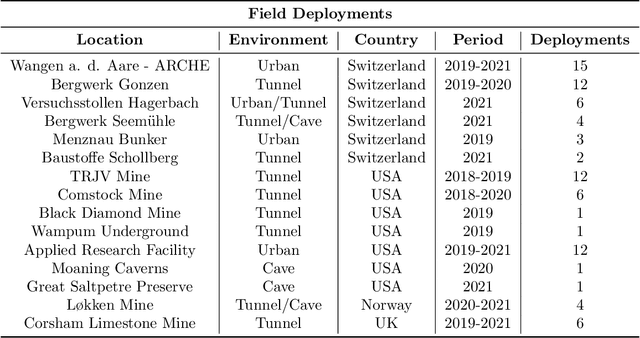
This article presents the CERBERUS robotic system-of-systems, which won the DARPA Subterranean Challenge Final Event in 2021. The Subterranean Challenge was organized by DARPA with the vision to facilitate the novel technologies necessary to reliably explore diverse underground environments despite the grueling challenges they present for robotic autonomy. Due to their geometric complexity, degraded perceptual conditions combined with lack of GPS support, austere navigation conditions, and denied communications, subterranean settings render autonomous operations particularly demanding. In response to this challenge, we developed the CERBERUS system which exploits the synergy of legged and flying robots, coupled with robust control especially for overcoming perilous terrain, multi-modal and multi-robot perception for localization and mapping in conditions of sensor degradation, and resilient autonomy through unified exploration path planning and local motion planning that reflects robot-specific limitations. Based on its ability to explore diverse underground environments and its high-level command and control by a single human supervisor, CERBERUS demonstrated efficient exploration, reliable detection of objects of interest, and accurate mapping. In this article, we report results from both the preliminary runs and the final Prize Round of the DARPA Subterranean Challenge, and discuss highlights and challenges faced, alongside lessons learned for the benefit of the community.