 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWatching Grass Grow: Long-term Visual Navigation and Mission Planning for Autonomous Biodiversity Monitoring
Apr 16, 2024



We describe a challenging robotics deployment in a complex ecosystem to monitor a rich plant community. The study site is dominated by dynamic grassland vegetation and is thus visually ambiguous and liable to drastic appearance change over the course of a day and especially through the growing season. This dynamism and complexity in appearance seriously impact the stability of the robotics platform, as localisation is a foundational part of that control loop, and so routes must be carefully taught and retaught until autonomy is robust and repeatable. Our system is demonstrated over a 6-week period monitoring the response of grass species to experimental climate change manipulations. We also discuss the applicability of our pipeline to monitor biodiversity in other complex natural settings.
Formal Verification of Unknown Dynamical Systems via Gaussian Process Regression
Dec 31, 2021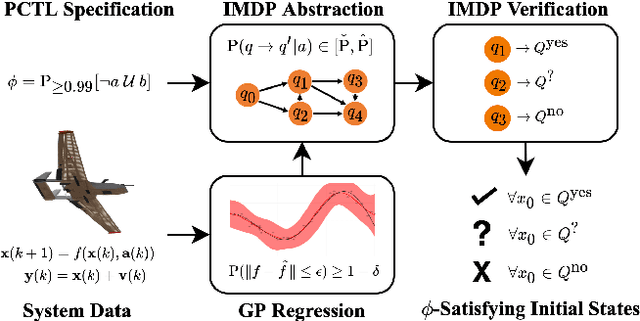


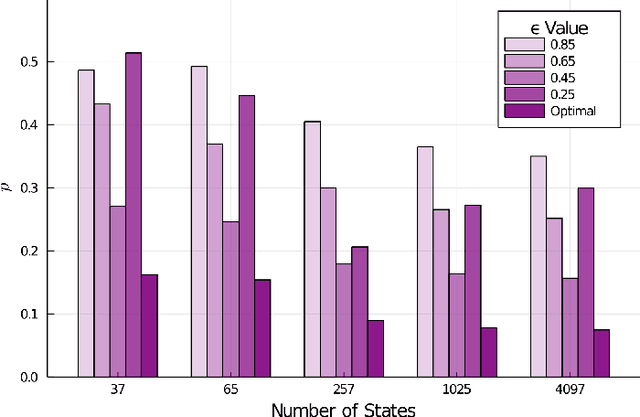
Leveraging autonomous systems in safety-critical scenarios requires verifying their behaviors in the presence of uncertainties and black-box components that influence the system dynamics. In this article, we develop a framework for verifying partially-observable, discrete-time dynamical systems with unmodelled dynamics against temporal logic specifications from a given input-output dataset. The verification framework employs Gaussian process (GP) regression to learn the unknown dynamics from the dataset and abstract the continuous-space system as a finite-state, uncertain Markov decision process (MDP). This abstraction relies on space discretization and transition probability intervals that capture the uncertainty due to the error in GP regression by using reproducible kernel Hilbert space analysis as well as the uncertainty induced by discretization. The framework utilizes existing model checking tools for verification of the uncertain MDP abstraction against a given temporal logic specification. We establish the correctness of extending the verification results on the abstraction to the underlying partially-observable system. We show that the computational complexity of the framework is polynomial in the size of the dataset and discrete abstraction. The complexity analysis illustrates a trade-off between the quality of the verification results and the computational burden to handle larger datasets and finer abstractions. Finally, we demonstrate the efficacy of our learning and verification framework on several case studies with linear, nonlinear, and switched dynamical systems.