 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCompSLAM: Complementary Hierarchical Multi-Modal Localization and Mapping for Robot Autonomy in Underground Environments
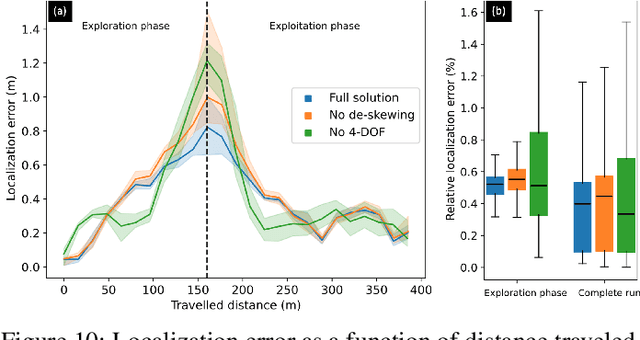
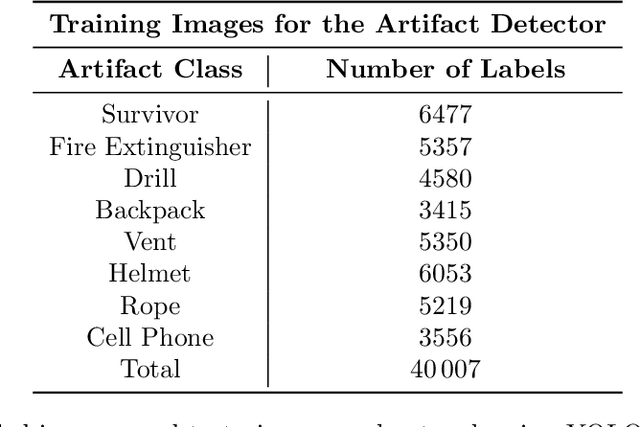
May 10, 2025Robot autonomy in unknown, GPS-denied, and complex underground environments requires real-time, robust, and accurate onboard pose estimation and mapping for reliable operations. This becomes particularly challenging in perception-degraded subterranean conditions under harsh environmental factors, including darkness, dust, and geometrically self-similar structures. This paper details CompSLAM, a highly resilient and hierarchical multi-modal localization and mapping framework designed to address these challenges. Its flexible architecture achieves resilience through redundancy by leveraging the complementary nature of pose estimates derived from diverse sensor modalities. Developed during the DARPA Subterranean Challenge, CompSLAM was successfully deployed on all aerial, legged, and wheeled robots of Team Cerberus during their competition-winning final run. Furthermore, it has proven to be a reliable odometry and mapping solution in various subsequent projects, with extensions enabling multi-robot map sharing for marsupial robotic deployments and collaborative mapping. This paper also introduces a comprehensive dataset acquired by a manually teleoperated quadrupedal robot, covering a significant portion of the DARPA Subterranean Challenge finals course. This dataset evaluates CompSLAM's robustness to sensor degradations as the robot traverses 740 meters in an environment characterized by highly variable geometries and demanding lighting conditions. The CompSLAM code and the DARPA SubT Finals dataset are made publicly available for the benefit of the robotics community
maplab 2.0 -- A Modular and Multi-Modal Mapping Framework
Dec 01, 2022Integration of multiple sensor modalities and deep learning into Simultaneous Localization And Mapping (SLAM) systems are areas of significant interest in current research. Multi-modality is a stepping stone towards achieving robustness in challenging environments and interoperability of heterogeneous multi-robot systems with varying sensor setups. With maplab 2.0, we provide a versatile open-source platform that facilitates developing, testing, and integrating new modules and features into a fully-fledged SLAM system. Through extensive experiments, we show that maplab 2.0's accuracy is comparable to the state-of-the-art on the HILTI 2021 benchmark. Additionally, we showcase the flexibility of our system with three use cases: i) large-scale (approx. 10 km) multi-robot multi-session (23 missions) mapping, ii) integration of non-visual landmarks, and iii) incorporating a semantic object-based loop closure module into the mapping framework. The code is available open-source at https://github.com/ethz-asl/maplab.
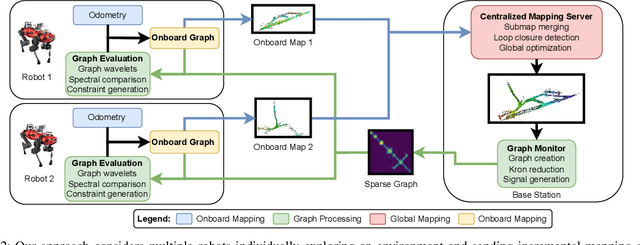
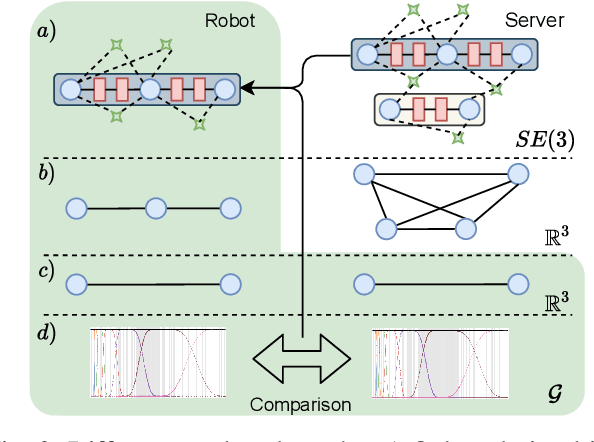
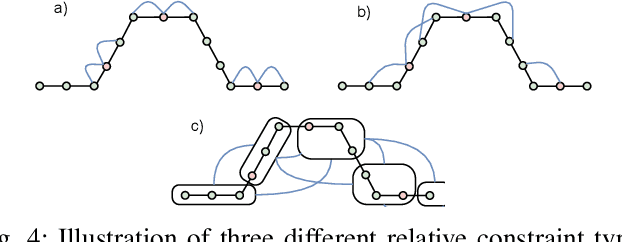
A Framework for Collaborative Multi-Robot Mapping using Spectral Graph Wavelets
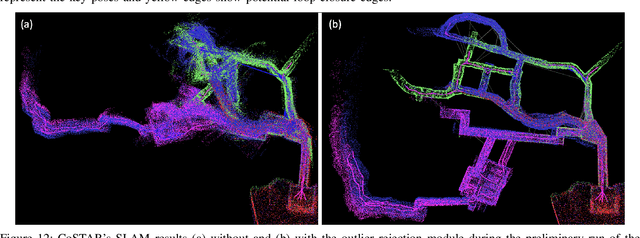
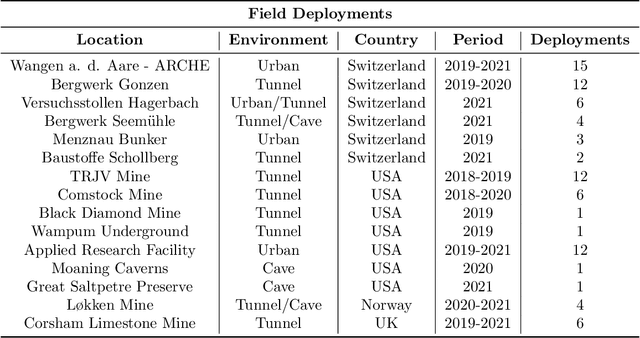
Nov 02, 2022The exploration of large-scale unknown environments can benefit from the deployment of multiple robots for collaborative mapping. Each robot explores a section of the environment and communicates onboard pose estimates and maps to a central server to build an optimized global multi-robot map. Naturally, inconsistencies can arise between onboard and server estimates due to onboard odometry drift, failures, or degeneracies. The mapping server can correct and overcome such failure cases using computationally expensive operations such as inter-robot loop closure detection and multi-modal mapping. However, the individual robots do not benefit from the collaborative map if the mapping server provides no feedback. Although server updates from the multi-robot map can greatly alleviate the robotic mission strategically, most existing work lacks them, due to their associated computational and bandwidth-related costs. Motivated by this challenge, this paper proposes a novel collaborative mapping framework that enables global mapping consistency among robots and the mapping server. In particular, we propose graph spectral analysis, at different spatial scales, to detect structural differences between robot and server graphs, and to generate necessary constraints for the individual robot pose graphs. Our approach specifically finds the nodes that correspond to the drift's origin rather than the nodes where the error becomes too large. We thoroughly analyze and validate our proposed framework using several real-world multi-robot field deployments where we show improvements of the onboard system up to 90\% and can recover the onboard estimation from localization failures and even from the degeneracies within its estimation.
SphNet: A Spherical Network for Semantic Pointcloud Segmentation
Oct 24, 2022Semantic segmentation for robotic systems can enable a wide range of applications, from self-driving cars and augmented reality systems to domestic robots. We argue that a spherical representation is a natural one for egocentric pointclouds. Thus, in this work, we present a novel framework exploiting such a representation of LiDAR pointclouds for the task of semantic segmentation. Our approach is based on a spherical convolutional neural network that can seamlessly handle observations from various sensor systems (e.g., different LiDAR systems) and provides an accurate segmentation of the environment. We operate in two distinct stages: First, we encode the projected input pointclouds to spherical features. Second, we decode and back-project the spherical features to achieve an accurate semantic segmentation of the pointcloud. We evaluate our method with respect to state-of-the-art projection-based semantic segmentation approaches using well-known public datasets. We demonstrate that the spherical representation enables us to provide more accurate segmentation and to have a better generalization to sensors with different field-of-view and number of beams than what was seen during training.
Present and Future of SLAM in Extreme Underground Environments
Aug 02, 2022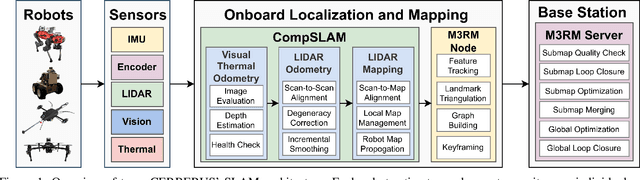
This paper reports on the state of the art in underground SLAM by discussing different SLAM strategies and results across six teams that participated in the three-year-long SubT competition. In particular, the paper has four main goals. First, we review the algorithms, architectures, and systems adopted by the teams; particular emphasis is put on lidar-centric SLAM solutions (the go-to approach for virtually all teams in the competition), heterogeneous multi-robot operation (including both aerial and ground robots), and real-world underground operation (from the presence of obscurants to the need to handle tight computational constraints). We do not shy away from discussing the dirty details behind the different SubT SLAM systems, which are often omitted from technical papers. Second, we discuss the maturity of the field by highlighting what is possible with the current SLAM systems and what we believe is within reach with some good systems engineering. Third, we outline what we believe are fundamental open problems, that are likely to require further research to break through. Finally, we provide a list of open-source SLAM implementations and datasets that have been produced during the SubT challenge and related efforts, and constitute a useful resource for researchers and practitioners.
Team CERBERUS Wins the DARPA Subterranean Challenge: Technical Overview and Lessons Learned
Jul 11, 2022
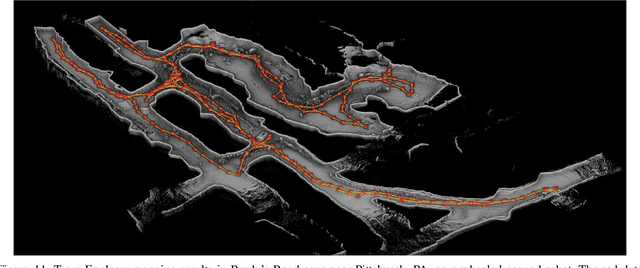
This article presents the CERBERUS robotic system-of-systems, which won the DARPA Subterranean Challenge Final Event in 2021. The Subterranean Challenge was organized by DARPA with the vision to facilitate the novel technologies necessary to reliably explore diverse underground environments despite the grueling challenges they present for robotic autonomy. Due to their geometric complexity, degraded perceptual conditions combined with lack of GPS support, austere navigation conditions, and denied communications, subterranean settings render autonomous operations particularly demanding. In response to this challenge, we developed the CERBERUS system which exploits the synergy of legged and flying robots, coupled with robust control especially for overcoming perilous terrain, multi-modal and multi-robot perception for localization and mapping in conditions of sensor degradation, and resilient autonomy through unified exploration path planning and local motion planning that reflects robot-specific limitations. Based on its ability to explore diverse underground environments and its high-level command and control by a single human supervisor, CERBERUS demonstrated efficient exploration, reliable detection of objects of interest, and accurate mapping. In this article, we report results from both the preliminary runs and the final Prize Round of the DARPA Subterranean Challenge, and discuss highlights and challenges faced, alongside lessons learned for the benefit of the community.
Collaborative Robot Mapping using Spectral Graph Analysis
Mar 01, 2022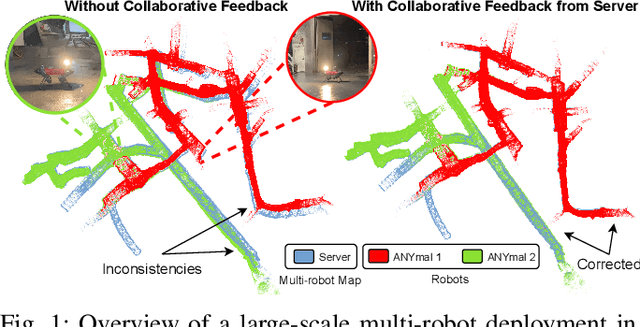
In this paper, we deal with the problem of creating globally consistent pose graphs in a centralized multi-robot SLAM framework. For each robot to act autonomously, individual onboard pose estimates and maps are maintained, which are then communicated to a central server to build an optimized global map. However, inconsistencies between onboard and server estimates can occur due to onboard odometry drift or failure. Furthermore, robots do not benefit from the collaborative map if the server provides no feedback in a computationally tractable and bandwidth-efficient manner. Motivated by this challenge, this paper proposes a novel collaborative mapping framework to enable accurate global mapping among robots and server. In particular, structural differences between robot and server graphs are exploited at different spatial scales using graph spectral analysis to generate necessary constraints for the individual robot pose graphs. The proposed approach is thoroughly analyzed and validated using several real-world multi-robot field deployments where we show improvements of the onboard system up to 90%.
CERBERUS: Autonomous Legged and Aerial Robotic Exploration in the Tunnel and Urban Circuits of the DARPA Subterranean Challenge
Jan 18, 2022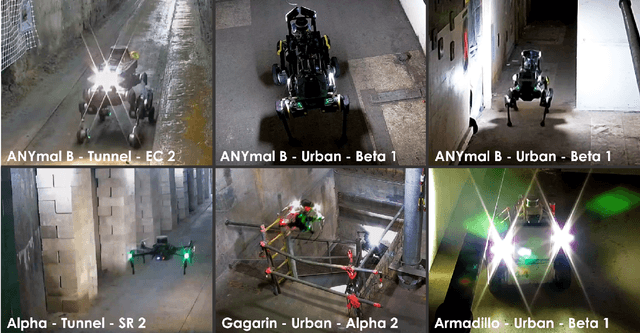
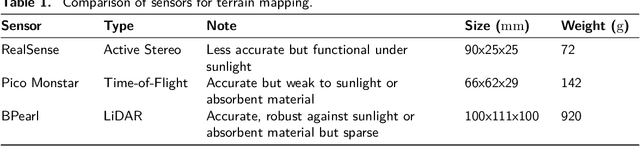
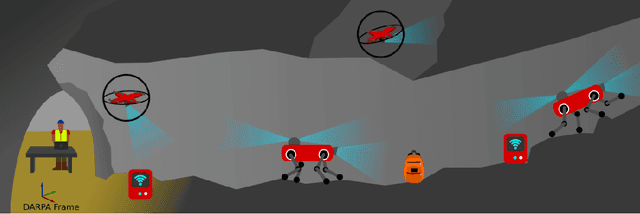

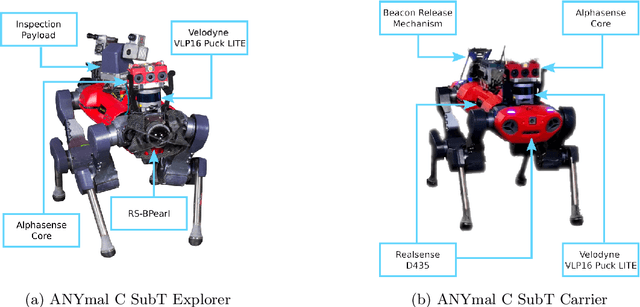
Autonomous exploration of subterranean environments constitutes a major frontier for robotic systems as underground settings present key challenges that can render robot autonomy hard to achieve. This has motivated the DARPA Subterranean Challenge, where teams of robots search for objects of interest in various underground environments. In response, the CERBERUS system-of-systems is presented as a unified strategy towards subterranean exploration using legged and flying robots. As primary robots, ANYmal quadruped systems are deployed considering their endurance and potential to traverse challenging terrain. For aerial robots, both conventional and collision-tolerant multirotors are utilized to explore spaces too narrow or otherwise unreachable by ground systems. Anticipating degraded sensing conditions, a complementary multi-modal sensor fusion approach utilizing camera, LiDAR, and inertial data for resilient robot pose estimation is proposed. Individual robot pose estimates are refined by a centralized multi-robot map optimization approach to improve the reported location accuracy of detected objects of interest in the DARPA-defined coordinate frame. Furthermore, a unified exploration path planning policy is presented to facilitate the autonomous operation of both legged and aerial robots in complex underground networks. Finally, to enable communication between the robots and the base station, CERBERUS utilizes a ground rover with a high-gain antenna and an optical fiber connection to the base station, alongside breadcrumbing of wireless nodes by our legged robots. We report results from the CERBERUS system-of-systems deployment at the DARPA Subterranean Challenge Tunnel and Urban Circuits, along with the current limitations and the lessons learned for the benefit of the community.
Spherical Multi-Modal Place Recognition for Heterogeneous Sensor Systems
Apr 17, 2021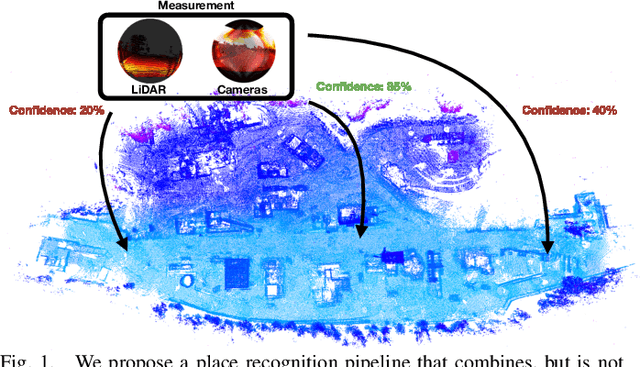
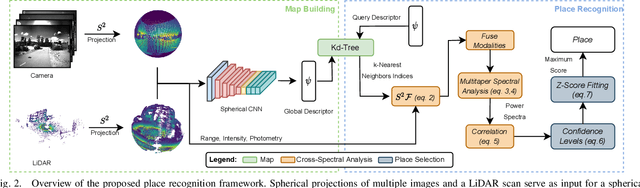
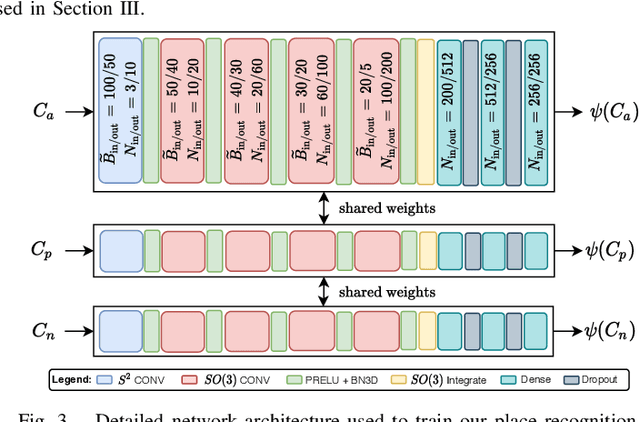
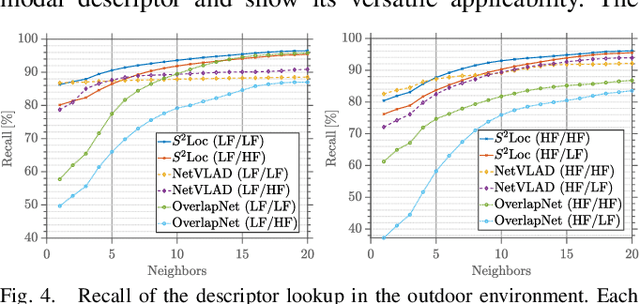
In this paper, we propose a robust end-to-end multi-modal pipeline for place recognition where the sensor systems can differ from the map building to the query. Our approach operates directly on images and LiDAR scans without requiring any local feature extraction modules. By projecting the sensor data onto the unit sphere, we learn a multi-modal descriptor of partially overlapping scenes using a spherical convolutional neural network. The employed spherical projection model enables the support of arbitrary LiDAR and camera systems readily without losing information. Loop closure candidates are found using a nearest-neighbor lookup in the embedding space. We tackle the problem of correctly identifying the closest place by correlating the candidates' power spectra, obtaining a confidence value per prospect. Our estimate for the correct place corresponds then to the candidate with the highest confidence. We evaluate our proposal w.r.t. state-of-the-art approaches in place recognition using real-world data acquired using different sensors. Our approach can achieve a recall that is up to 10% and 5% higher than for a LiDAR- and vision-based system, respectively, when the sensor setup differs between model training and deployment. Additionally, our place selection can correctly identify up to 95% matches from the candidate set.
3D3L: Deep Learned 3D Keypoint Detection and Description for LiDARs
Apr 12, 2021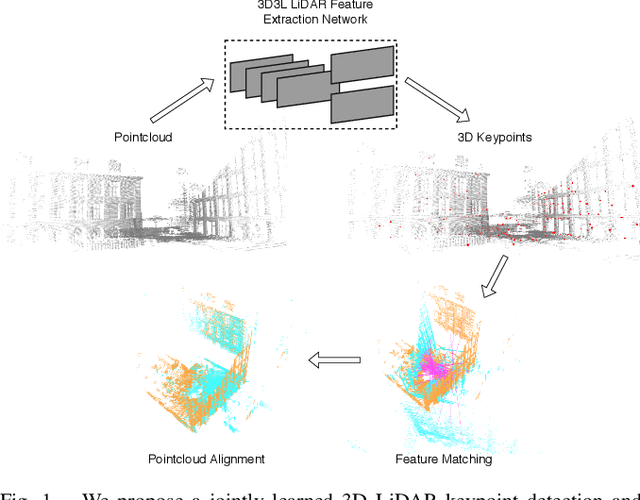
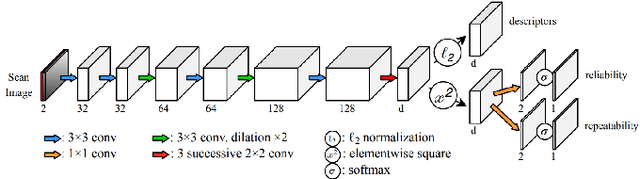
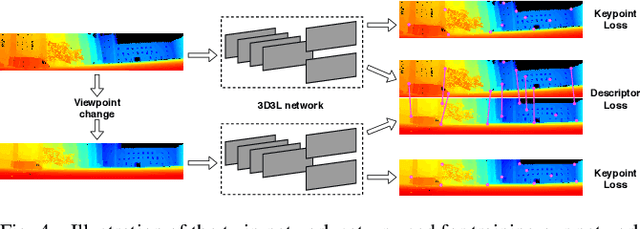

With the advent of powerful, light-weight 3D LiDARs, they have become the hearth of many navigation and SLAM algorithms on various autonomous systems. Pointcloud registration methods working with unstructured pointclouds such as ICP are often computationally expensive or require a good initial guess. Furthermore, 3D feature-based registration methods have never quite reached the robustness of 2D methods in visual SLAM. With the continuously increasing resolution of LiDAR range images, these 2D methods not only become applicable but should exploit the illumination-independent modalities that come with it, such as depth and intensity. In visual SLAM, deep learned 2D features and descriptors perform exceptionally well compared to traditional methods. In this publication, we use a state-of-the-art 2D feature network as a basis for 3D3L, exploiting both intensity and depth of LiDAR range images to extract powerful 3D features. Our results show that these keypoints and descriptors extracted from LiDAR scan images outperform state-of-the-art on different benchmark metrics and allow for robust scan-to-scan alignment as well as global localization.