 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCompSLAM: Complementary Hierarchical Multi-Modal Localization and Mapping for Robot Autonomy in Underground Environments
May 10, 2025Robot autonomy in unknown, GPS-denied, and complex underground environments requires real-time, robust, and accurate onboard pose estimation and mapping for reliable operations. This becomes particularly challenging in perception-degraded subterranean conditions under harsh environmental factors, including darkness, dust, and geometrically self-similar structures. This paper details CompSLAM, a highly resilient and hierarchical multi-modal localization and mapping framework designed to address these challenges. Its flexible architecture achieves resilience through redundancy by leveraging the complementary nature of pose estimates derived from diverse sensor modalities. Developed during the DARPA Subterranean Challenge, CompSLAM was successfully deployed on all aerial, legged, and wheeled robots of Team Cerberus during their competition-winning final run. Furthermore, it has proven to be a reliable odometry and mapping solution in various subsequent projects, with extensions enabling multi-robot map sharing for marsupial robotic deployments and collaborative mapping. This paper also introduces a comprehensive dataset acquired by a manually teleoperated quadrupedal robot, covering a significant portion of the DARPA Subterranean Challenge finals course. This dataset evaluates CompSLAM's robustness to sensor degradations as the robot traverses 740 meters in an environment characterized by highly variable geometries and demanding lighting conditions. The CompSLAM code and the DARPA SubT Finals dataset are made publicly available for the benefit of the robotics community
FLoRA: Sample-Efficient Preference-based RL via Low-Rank Style Adaptation of Reward Functions
Apr 14, 2025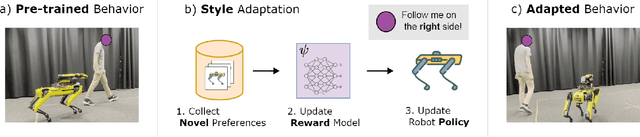
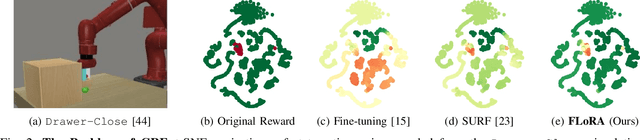
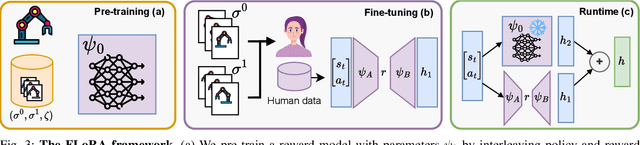
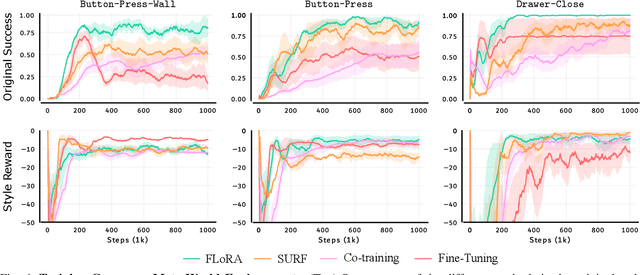
Preference-based reinforcement learning (PbRL) is a suitable approach for style adaptation of pre-trained robotic behavior: adapting the robot's policy to follow human user preferences while still being able to perform the original task. However, collecting preferences for the adaptation process in robotics is often challenging and time-consuming. In this work we explore the adaptation of pre-trained robots in the low-preference-data regime. We show that, in this regime, recent adaptation approaches suffer from catastrophic reward forgetting (CRF), where the updated reward model overfits to the new preferences, leading the agent to become unable to perform the original task. To mitigate CRF, we propose to enhance the original reward model with a small number of parameters (low-rank matrices) responsible for modeling the preference adaptation. Our evaluation shows that our method can efficiently and effectively adjust robotic behavior to human preferences across simulation benchmark tasks and multiple real-world robotic tasks.
One Map to Find Them All: Real-time Open-Vocabulary Mapping for Zero-shot Multi-Object Navigation
Sep 18, 2024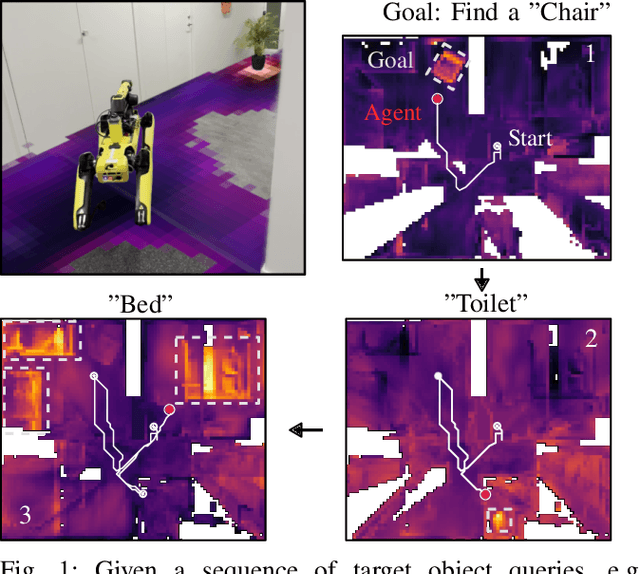
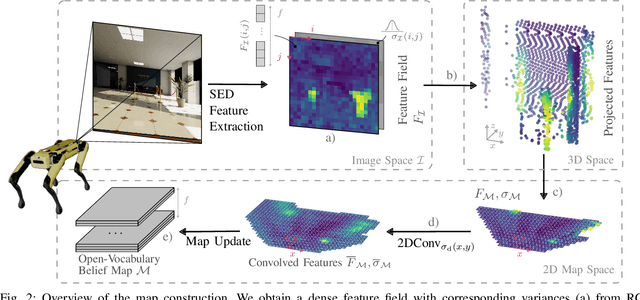
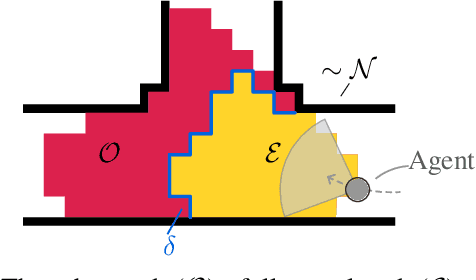
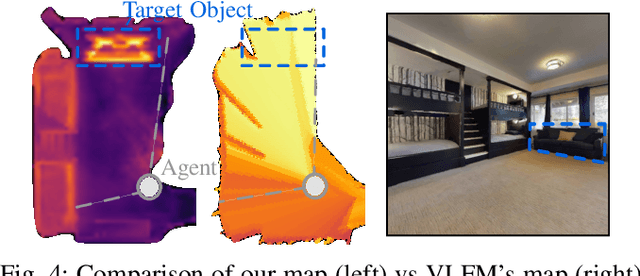
The capability to efficiently search for objects in complex environments is fundamental for many real-world robot applications. Recent advances in open-vocabulary vision models have resulted in semantically-informed object navigation methods that allow a robot to search for an arbitrary object without prior training. However, these zero-shot methods have so far treated the environment as unknown for each consecutive query. In this paper we introduce a new benchmark for zero-shot multi-object navigation, allowing the robot to leverage information gathered from previous searches to more efficiently find new objects. To address this problem we build a reusable open-vocabulary feature map tailored for real-time object search. We further propose a probabilistic-semantic map update that mitigates common sources of errors in semantic feature extraction and leverage this semantic uncertainty for informed multi-object exploration. We evaluate our method on a set of object navigation tasks in both simulation as well as with a real robot, running in real-time on a Jetson Orin AGX. We demonstrate that it outperforms existing state-of-the-art approaches both on single and multi-object navigation tasks. Additional videos, code and the multi-object navigation benchmark will be available on https://finnbsch.github.io/OneMap.
Team CERBERUS Wins the DARPA Subterranean Challenge: Technical Overview and Lessons Learned
Jul 11, 2022
This article presents the CERBERUS robotic system-of-systems, which won the DARPA Subterranean Challenge Final Event in 2021. The Subterranean Challenge was organized by DARPA with the vision to facilitate the novel technologies necessary to reliably explore diverse underground environments despite the grueling challenges they present for robotic autonomy. Due to their geometric complexity, degraded perceptual conditions combined with lack of GPS support, austere navigation conditions, and denied communications, subterranean settings render autonomous operations particularly demanding. In response to this challenge, we developed the CERBERUS system which exploits the synergy of legged and flying robots, coupled with robust control especially for overcoming perilous terrain, multi-modal and multi-robot perception for localization and mapping in conditions of sensor degradation, and resilient autonomy through unified exploration path planning and local motion planning that reflects robot-specific limitations. Based on its ability to explore diverse underground environments and its high-level command and control by a single human supervisor, CERBERUS demonstrated efficient exploration, reliable detection of objects of interest, and accurate mapping. In this article, we report results from both the preliminary runs and the final Prize Round of the DARPA Subterranean Challenge, and discuss highlights and challenges faced, alongside lessons learned for the benefit of the community.
Elevation Mapping for Locomotion and Navigation using GPU
Apr 27, 2022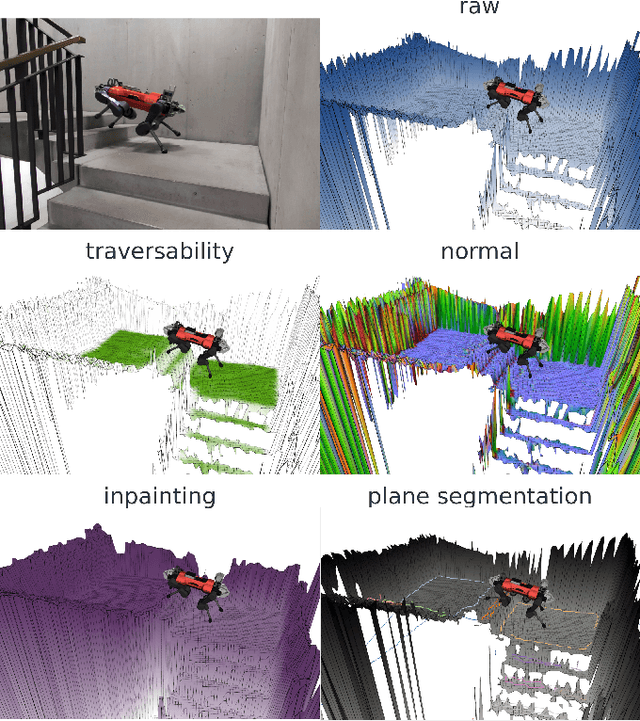
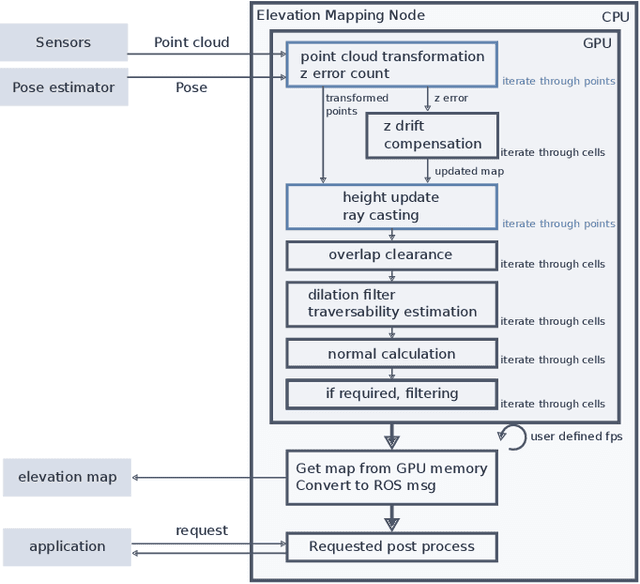
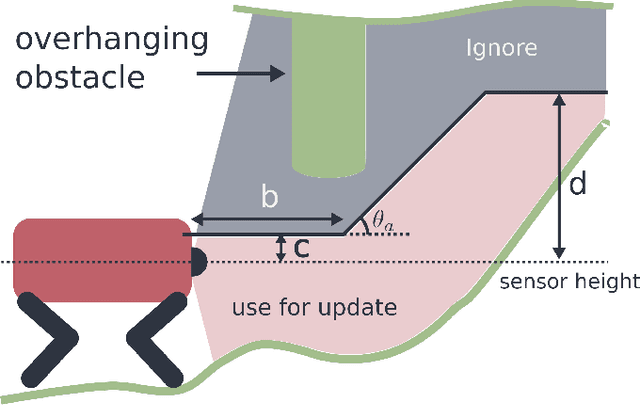
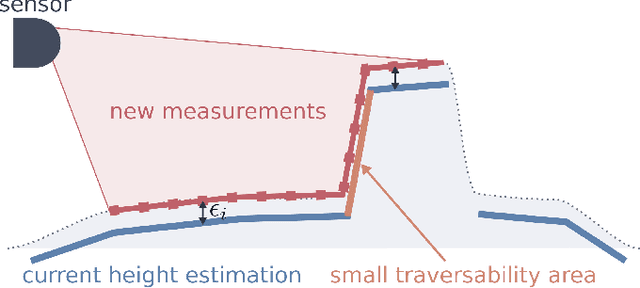
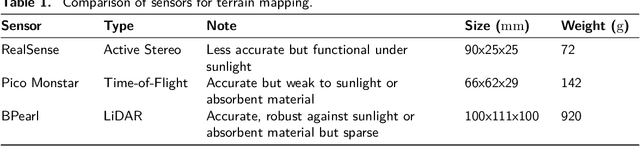
Perceiving the surrounding environment is crucial for autonomous mobile robots. An elevation map provides a memory-efficient and simple yet powerful geometric representation for ground robots. The robots can use this information for navigation in an unknown environment or perceptive locomotion control over rough terrain. Depending on the application, various post processing steps may be incorporated, such as smoothing, inpainting or plane segmentation. In this work, we present an elevation mapping pipeline leveraging GPU for fast and efficient processing with additional features both for navigation and locomotion. We demonstrated our mapping framework through extensive hardware experiments. Our mapping software was successfully deployed for underground exploration during DARPA Subterranean Challenge and for various experiments of quadrupedal locomotion.
CERBERUS: Autonomous Legged and Aerial Robotic Exploration in the Tunnel and Urban Circuits of the DARPA Subterranean Challenge
Jan 18, 2022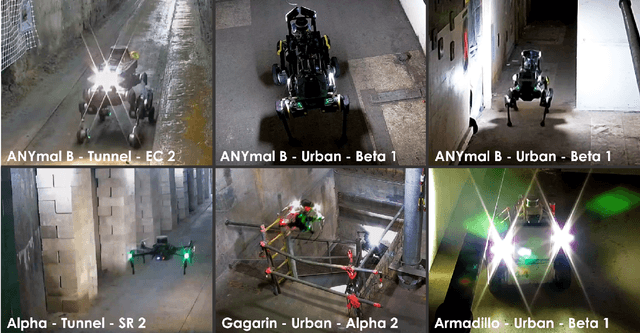
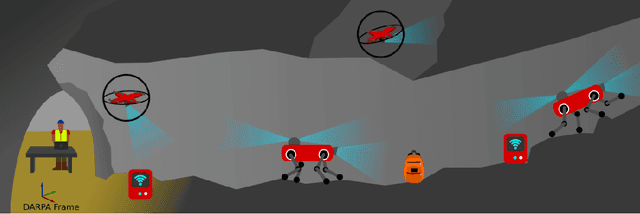

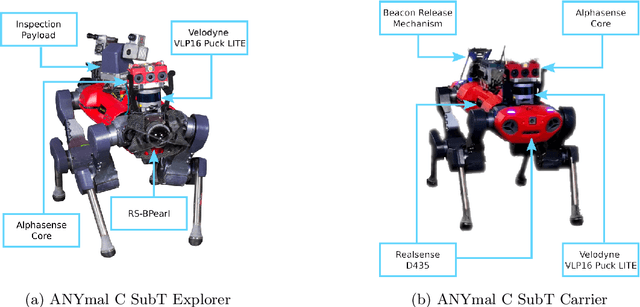
Autonomous exploration of subterranean environments constitutes a major frontier for robotic systems as underground settings present key challenges that can render robot autonomy hard to achieve. This has motivated the DARPA Subterranean Challenge, where teams of robots search for objects of interest in various underground environments. In response, the CERBERUS system-of-systems is presented as a unified strategy towards subterranean exploration using legged and flying robots. As primary robots, ANYmal quadruped systems are deployed considering their endurance and potential to traverse challenging terrain. For aerial robots, both conventional and collision-tolerant multirotors are utilized to explore spaces too narrow or otherwise unreachable by ground systems. Anticipating degraded sensing conditions, a complementary multi-modal sensor fusion approach utilizing camera, LiDAR, and inertial data for resilient robot pose estimation is proposed. Individual robot pose estimates are refined by a centralized multi-robot map optimization approach to improve the reported location accuracy of detected objects of interest in the DARPA-defined coordinate frame. Furthermore, a unified exploration path planning policy is presented to facilitate the autonomous operation of both legged and aerial robots in complex underground networks. Finally, to enable communication between the robots and the base station, CERBERUS utilizes a ground rover with a high-gain antenna and an optical fiber connection to the base station, alongside breadcrumbing of wireless nodes by our legged robots. We report results from the CERBERUS system-of-systems deployment at the DARPA Subterranean Challenge Tunnel and Urban Circuits, along with the current limitations and the lessons learned for the benefit of the community.
Circus ANYmal: A Quadruped Learning Dexterous Manipulation with Its Limbs
Dec 10, 2020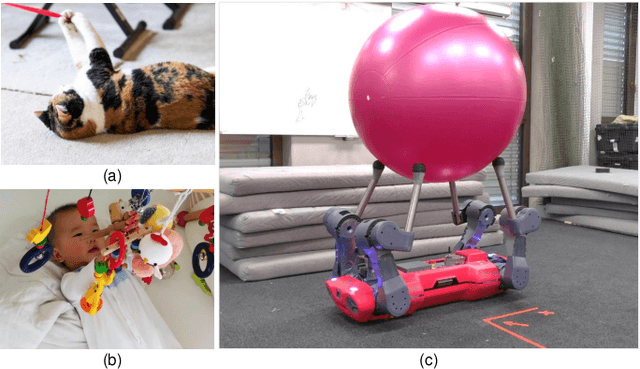
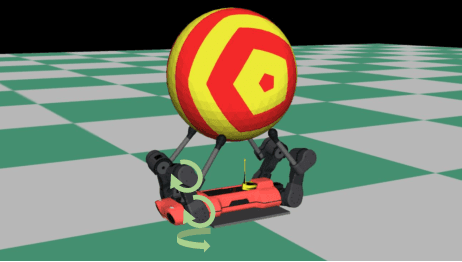
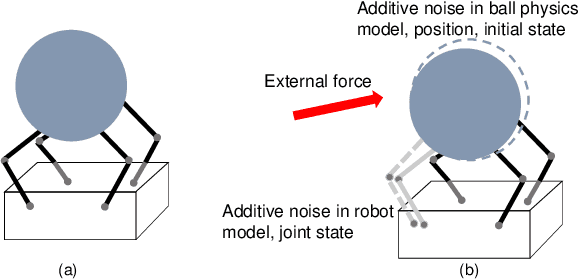
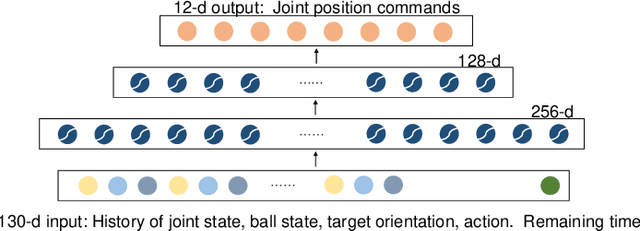
Quadrupedal robots are skillful at locomotion tasks while lacking manipulation skills, not to mention dexterous manipulation abilities. Inspired by the animal behavior and the duality between multi-legged locomotion and multi-fingered manipulation, we showcase a circus ball challenge on a quadrupedal robot, ANYmal. We employ a model-free reinforcement learning approach to train a deep policy that enables the robot to balance and manipulate a light-weight ball robustly using its limbs without any contact measurement sensor. The policy is trained in the simulation, in which we randomize many physical properties with additive noise and inject random disturbance force during manipulation, and achieves zero-shot deployment on the real robot without any adjustment. In the hardware experiments, dynamic performance is achieved with a maximum rotation speed of 15 deg/s, and robust recovery is showcased under external poking. To our best knowledge, it is the first work that demonstrates the dexterous dynamic manipulation on a real quadrupedal robot.