 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnalysis of Various Manipulator Configurations Based on Multi-Objective Black-Box Optimization
Jan 06, 2026Various 6-degree-of-freedom (DOF) and 7-DOF manipulators have been developed to date. Over a long history, their joint configurations and link length ratios have been determined empirically. In recent years, the development of robotic foundation models has become increasingly active, leading to the continuous proposal of various manipulators to support these models. However, none of these manipulators share exactly the same structure, as the order of joints and the ratio of link lengths differ among robots. Therefore, in order to discuss the optimal structure of a manipulator, we performed multi-objective optimization from the perspectives of end-effector reachability and joint torque. We analyze where existing manipulator structures stand within the sampling results of the optimization and provide insights for future manipulator design.
M3D-skin: Multi-material 3D-printed Tactile Sensor with Hierarchical Infill Structures for Pressure Sensing
Oct 14, 2025Tactile sensors have a wide range of applications, from utilization in robotic grippers to human motion measurement. If tactile sensors could be fabricated and integrated more easily, their applicability would further expand. In this study, we propose a tactile sensor-M3D-skin-that can be easily fabricated with high versatility by leveraging the infill patterns of a multi-material fused deposition modeling (FDM) 3D printer as the sensing principle. This method employs conductive and non-conductive flexible filaments to create a hierarchical structure with a specific infill pattern. The flexible hierarchical structure deforms under pressure, leading to a change in electrical resistance, enabling the acquisition of tactile information. We measure the changes in characteristics of the proposed tactile sensor caused by modifications to the hierarchical structure. Additionally, we demonstrate the fabrication and use of a multi-tile sensor. Furthermore, as applications, we implement motion pattern measurement on the sole of a foot, integration with a robotic hand, and tactile-based robotic operations. Through these experiments, we validate the effectiveness of the proposed tactile sensor.
Flexible Morphing Aerial Robot with Inflatable Structure for Perching-based Human-Robot Interaction
Sep 09, 2025Birds in nature perform perching not only for rest but also for interaction with human such as the relationship with falconers. Recently, researchers achieve perching-capable aerial robots as a way to save energy, and deformable structure demonstrate significant advantages in efficiency of perching and compactness of configuration. However, ensuring flight stability remains challenging for deformable aerial robots due to the difficulty of controlling flexible arms. Furthermore, perching for human interaction requires high compliance along with safety. Thus, this study aims to develop a deformable aerial robot capable of perching on humans with high flexibility and grasping ability. To overcome the challenges of stability of both flight and perching, we propose a hybrid morphing structure that combines a unilateral flexible arm and a pneumatic inflatable actuators. This design allows the robot's arms to remain rigid during flight and soft while perching for more effective grasping. We also develop a pneumatic control system that optimizes pressure regulation while integrating shock absorption and adjustable grasping forces, enhancing interaction capabilities and energy efficiency. Besides, we focus on the structural characteristics of the unilateral flexible arm and identify sufficient conditions under which standard quadrotor modeling and control remain effective in terms of flight stability. Finally, the developed prototype demonstrates the feasibility of compliant perching maneuvers on humans, as well as the robust recovery even after arm deformation caused by thrust reductions during flight. To the best of our knowledge, this work is the first to achieve an aerial robot capable of perching on humans for interaction.
MEVITA: Open-Source Bipedal Robot Assembled from E-Commerce Components via Sheet Metal Welding
Aug 25, 2025Various bipedal robots have been developed to date, and in recent years, there has been a growing trend toward releasing these robots as open-source platforms. This shift is fostering an environment in which anyone can freely develop bipedal robots and share their knowledge, rather than relying solely on commercial products. However, most existing open-source bipedal robots are designed to be fabricated using 3D printers, which limits their scalability in size and often results in fragile structures. On the other hand, some metal-based bipedal robots have been developed, but they typically involve a large number of components, making assembly difficult, and in some cases, the parts themselves are not readily available through e-commerce platforms. To address these issues, we developed MEVITA, an open-source bipedal robot that can be built entirely from components available via e-commerce. Aiming for the minimal viable configuration for a bipedal robot, we utilized sheet metal welding to integrate complex geometries into single parts, thereby significantly reducing the number of components and enabling easy assembly for anyone. Through reinforcement learning in simulation and Sim-to-Real transfer, we demonstrated robust walking behaviors across various environments, confirming the effectiveness of our approach. All hardware, software, and training environments can be obtained from https://github.com/haraduka/mevita .
KLEIYN : A Quadruped Robot with an Active Waist for Both Locomotion and Wall Climbing
Jul 09, 2025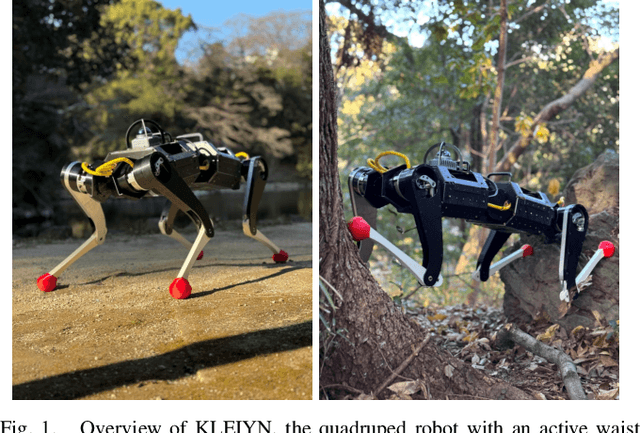
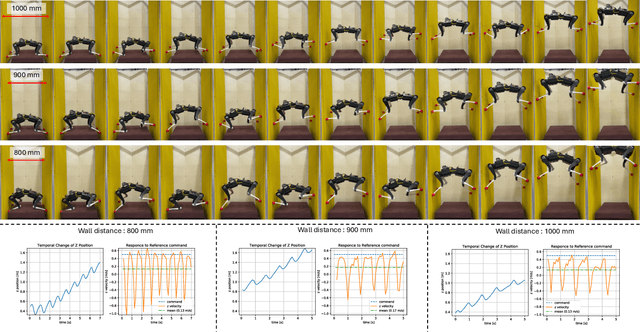
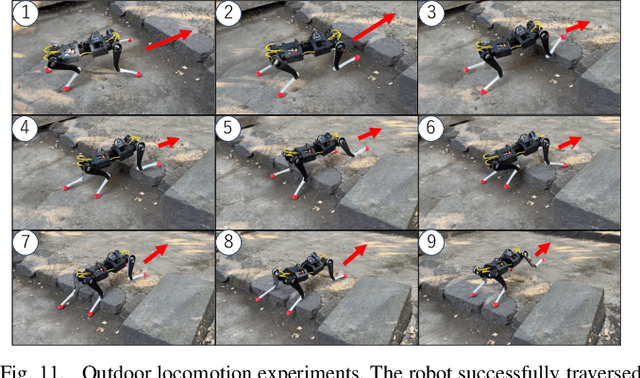
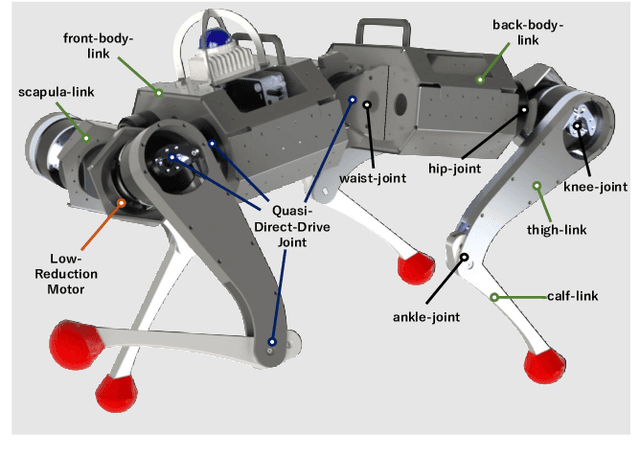
In recent years, advancements in hardware have enabled quadruped robots to operate with high power and speed, while robust locomotion control using reinforcement learning (RL) has also been realized. As a result, expectations are rising for the automation of tasks such as material transport and exploration in unknown environments. However, autonomous locomotion in rough terrains with significant height variations requires vertical movement, and robots capable of performing such movements stably, along with their control methods, have not yet been fully established. In this study, we developed the quadruped robot KLEIYN, which features a waist joint, and aimed to expand quadruped locomotion by enabling chimney climbing through RL. To facilitate the learning of vertical motion, we introduced Contact-Guided Curriculum Learning (CGCL). As a result, KLEIYN successfully climbed walls ranging from 800 mm to 1000 mm in width at an average speed of 150 mm/s, 50 times faster than conventional robots. Furthermore, we demonstrated that the introduction of a waist joint improves climbing performance, particularly enhancing tracking ability on narrow walls.
Optimization-based Posture Generation for Whole-body Contact Motion by Contact Point Search on the Body Surface
May 29, 2025Whole-body contact is an effective strategy for improving the stability and efficiency of the motion of robots. For robots to automatically perform such motions, we propose a posture generation method that employs all available surfaces of the robot links. By representing the contact point on the body surface by two-dimensional configuration variables, the joint positions and contact points are simultaneously determined through a gradient-based optimization. By generating motions with the proposed method, we present experiments in which robots manipulate objects effectively utilizing whole-body contact.
Reflex-based Motion Strategy of Musculoskeletal Humanoids under Environmental Contact Using Muscle Relaxation Control
Feb 22, 2025The musculoskeletal humanoid can move well under environmental contact thanks to its body softness. However, there are few studies that actively make use of the environment to rest its flexible musculoskeletal body. Also, its complex musculoskeletal structure is difficult to modelize and high internal muscle tension sometimes occurs. To solve these problems, we develop a muscle relaxation control which can minimize the muscle tension by actively using the environment and inhibit useless internal muscle tension. We apply this control to some basic movements, the motion of resting the arms on the desk, and handle operation, and verify its effectiveness.
Online Learning of Danger Avoidance for Complex Structures of Musculoskeletal Humanoids and Its Applications
Feb 22, 2025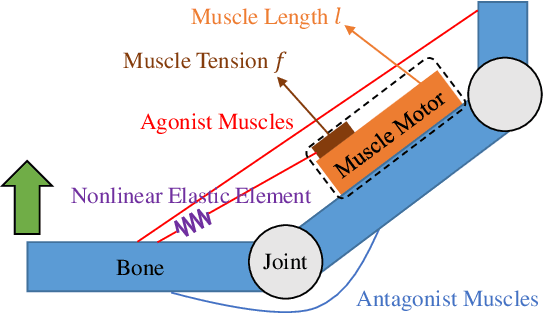
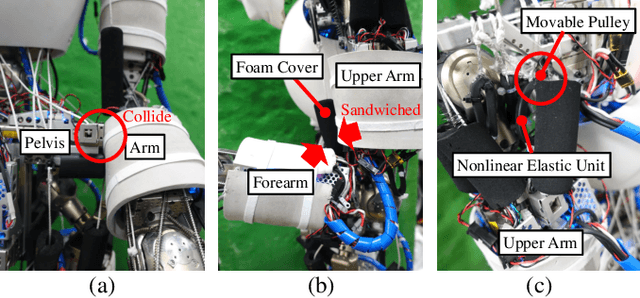
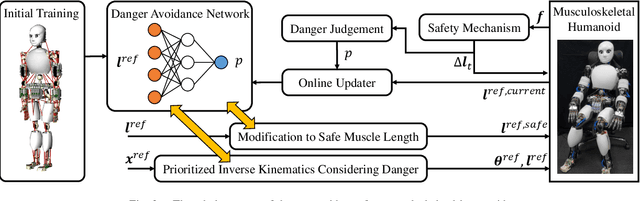
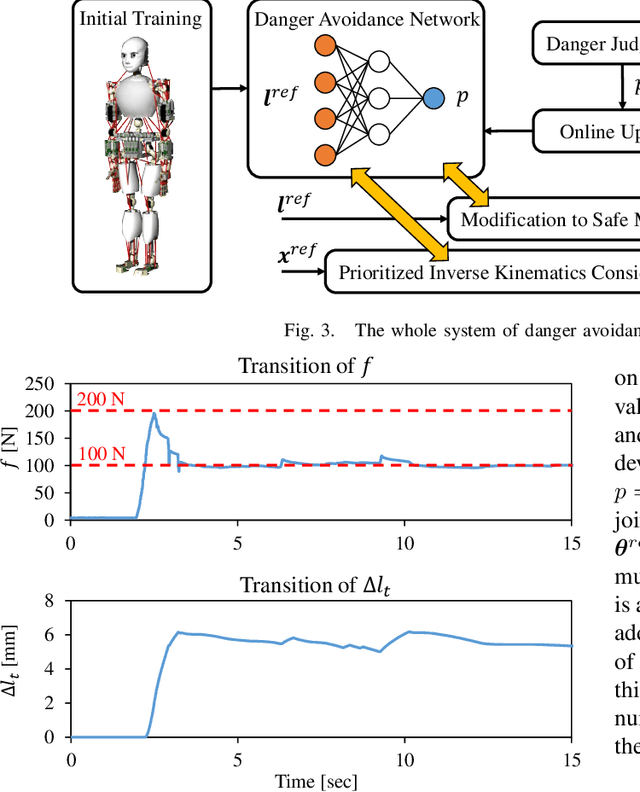
The complex structure of musculoskeletal humanoids makes it difficult to model them, and the inter-body interference and high internal muscle force are unavoidable. Although various safety mechanisms have been developed to solve this problem, it is important not only to deal with the dangers when they occur but also to prevent them from happening. In this study, we propose a method to learn a network outputting danger probability corresponding to the muscle length online so that the robot can gradually prevent dangers from occurring. Applications of this network for control are also described. The method is applied to the musculoskeletal humanoid, Musashi, and its effectiveness is verified.
Stability Recognition with Active Vibration for Bracing Behaviors and Motion Extensions Using Environment in Musculoskeletal Humanoids
Feb 22, 2025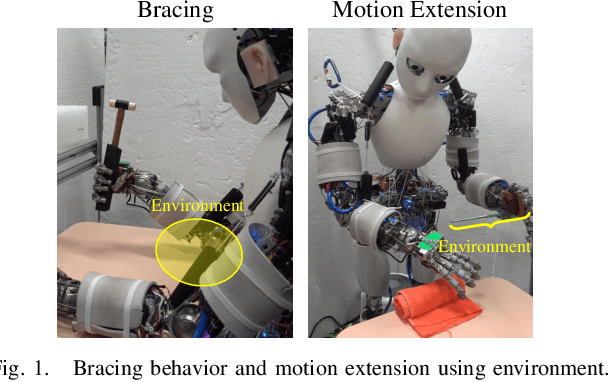
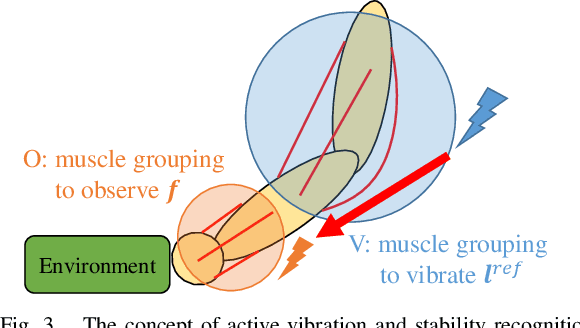
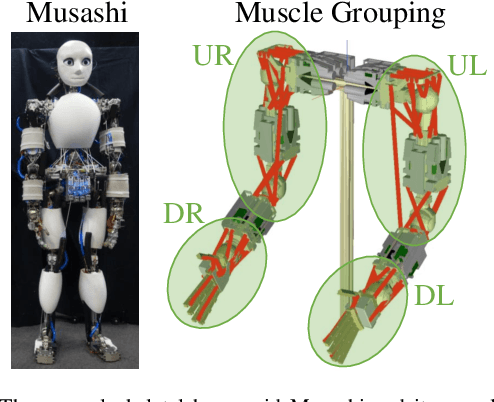
Although robots with flexible bodies are superior in terms of the contact and adaptability, it is difficult to control them precisely. On the other hand, human beings make use of the surrounding environments to stabilize their bodies and control their movements. In this study, we propose a method for the bracing motion and extension of the range of motion using the environment for the musculoskeletal humanoid. Here, it is necessary to recognize the stability of the body when contacting the environment, and we develop a method to measure it by using the change in sensor values of the body when actively vibrating a part of the body. Experiments are conducted using the musculoskeletal humanoid Musashi, and the effectiveness of this method is confirmed.
Design Optimization of Musculoskeletal Humanoids with Maximization of Redundancy to Compensate for Muscle Rupture
Feb 18, 2025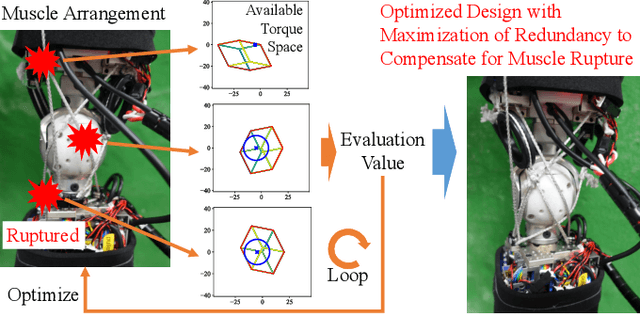

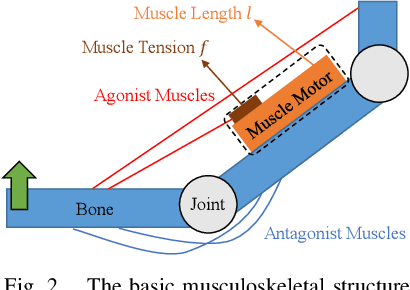
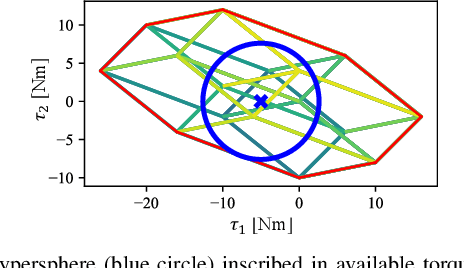
Musculoskeletal humanoids have various biomimetic advantages, and the redundant muscle arrangement allowing for variable stiffness control is one of the most important. In this study, we focus on one feature of the redundancy, which enables the humanoid to keep moving even if one of its muscles breaks, an advantage that has not been dealt with in many studies. In order to make the most of this advantage, the design of muscle arrangement is optimized by considering the maximization of minimum available torque that can be exerted when one muscle breaks. This method is applied to the elbow of a musculoskeletal humanoid Musashi with simulations, the design policy is extracted from the optimization results, and its effectiveness is confirmed with the actual robot.