 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Learning of Danger Avoidance for Complex Structures of Musculoskeletal Humanoids and Its Applications
Feb 22, 2025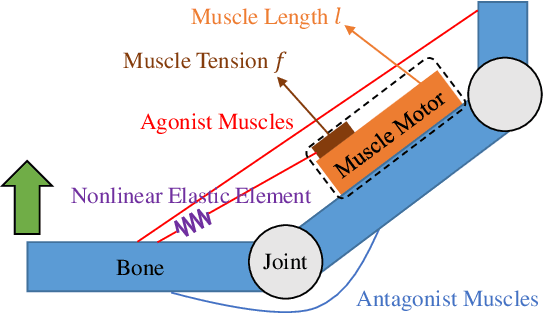
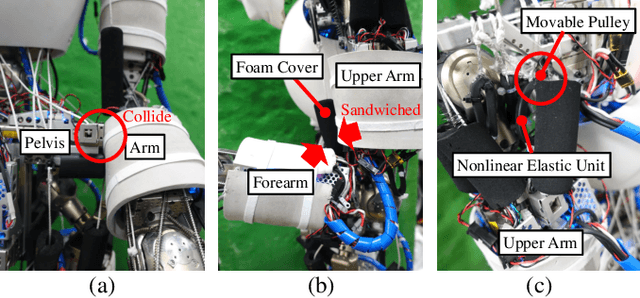
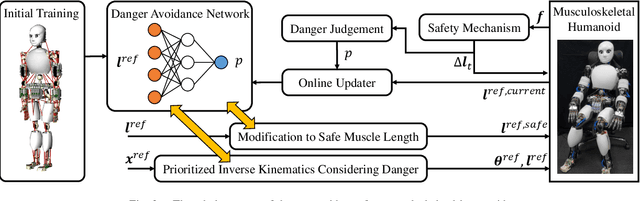
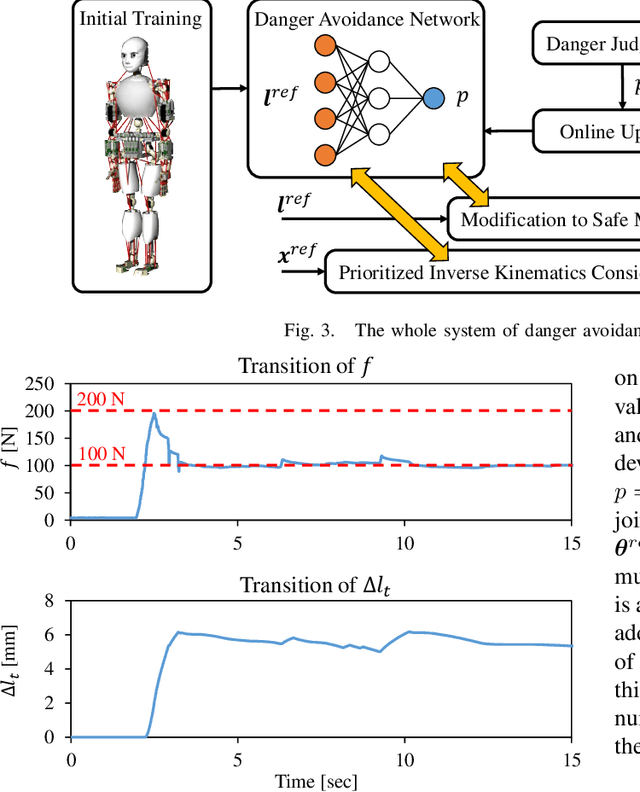
The complex structure of musculoskeletal humanoids makes it difficult to model them, and the inter-body interference and high internal muscle force are unavoidable. Although various safety mechanisms have been developed to solve this problem, it is important not only to deal with the dangers when they occur but also to prevent them from happening. In this study, we propose a method to learn a network outputting danger probability corresponding to the muscle length online so that the robot can gradually prevent dangers from occurring. Applications of this network for control are also described. The method is applied to the musculoskeletal humanoid, Musashi, and its effectiveness is verified.
Estimation and Control of Motor Core Temperature with Online Learning of Thermal Model Parameters: Application to Musculoskeletal Humanoids
Jul 10, 2024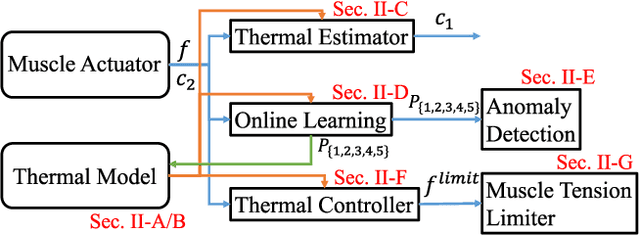
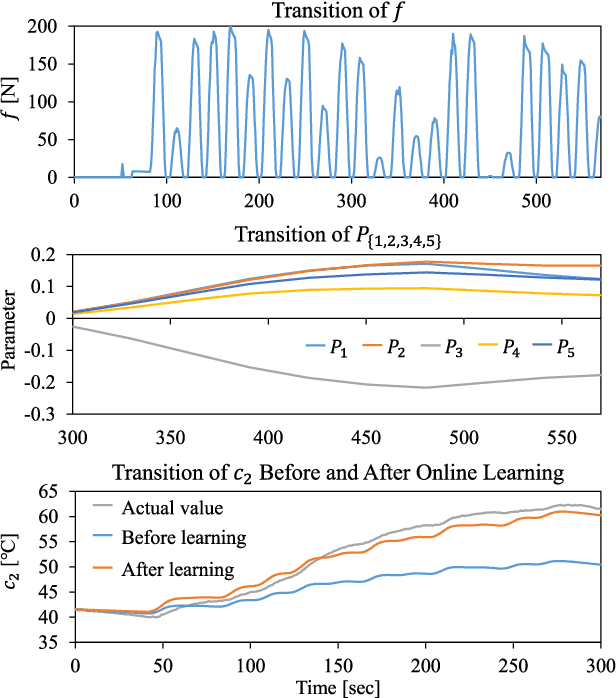
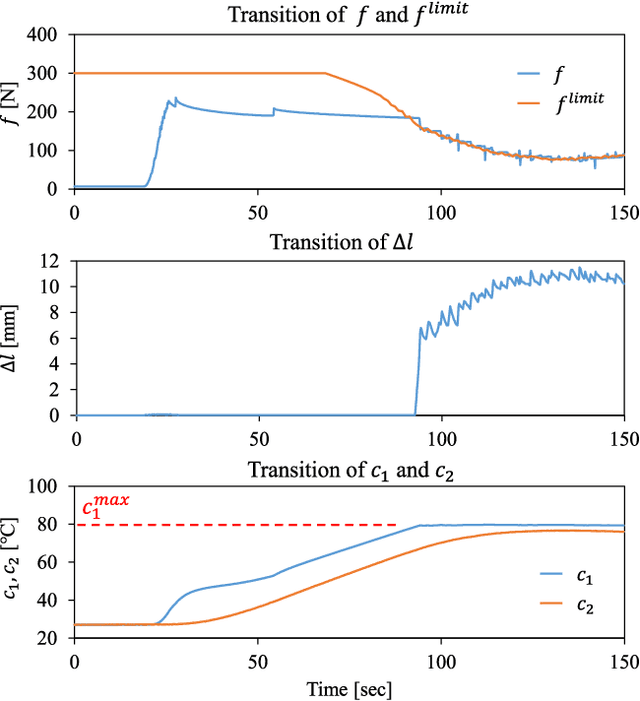
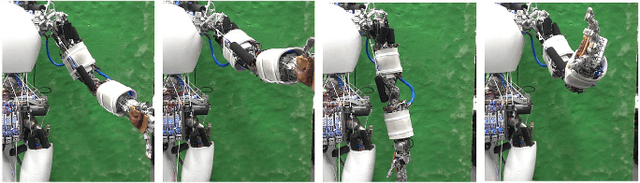
The estimation and management of motor temperature are important for the continuous movements of robots. In this study, we propose an online learning method of thermal model parameters of motors for an accurate estimation of motor core temperature. Also, we propose a management method of motor core temperature using the updated model and anomaly detection method of motors. Finally, we apply this method to the muscles of the musculoskeletal humanoid and verify the ability of continuous movements.
CoverLib: Classifiers-equipped Experience Library by Iterative Problem Distribution Coverage Maximization for Domain-tuned Motion Planning
May 07, 2024Library-based methods are known to be very effective for fast motion planning by adapting an experience retrieved from a precomputed library. This article presents CoverLib, a principled approach for constructing and utilizing such a library. CoverLib iteratively adds an experience-classifier-pair to the library, where each classifier corresponds to an adaptable region of the experience within the problem space. This iterative process is an active procedure, as it selects the next experience based on its ability to effectively cover the uncovered region. During the query phase, these classifiers are utilized to select an experience that is expected to be adaptable for a given problem. Experimental results demonstrate that CoverLib effectively mitigates the trade-off between plannability and speed observed in global (e.g. sampling-based) and local (e.g. optimization-based) methods. As a result, it achieves both fast planning and high success rates over the problem domain. Moreover, due to its adaptation-algorithm-agnostic nature, CoverLib seamlessly integrates with various adaptation methods, including nonlinear programming-based and sampling-based algorithms.
HumanMimic: Learning Natural Locomotion and Transitions for Humanoid Robot via Wasserstein Adversarial Imitation
Sep 28, 2023



Transferring human motion skills to humanoid robots remains a significant challenge. In this study, we introduce a Wasserstein adversarial imitation learning system, allowing humanoid robots to replicate natural whole-body locomotion patterns and execute seamless transitions by mimicking human motions. First, we present a unified primitive-skeleton motion retargeting to mitigate morphological differences between arbitrary human demonstrators and humanoid robots. An adversarial critic component is integrated with Reinforcement Learning (RL) to guide the control policy to produce behaviors aligned with the data distribution of mixed reference motions. Additionally, we employ a specific Integral Probabilistic Metric (IPM), namely the Wasserstein-1 distance with a novel soft boundary constraint to stabilize the training process and prevent model collapse. Our system is evaluated on a full-sized humanoid JAXON in the simulator. The resulting control policy demonstrates a wide range of locomotion patterns, including standing, push-recovery, squat walking, human-like straight-leg walking, and dynamic running. Notably, even in the absence of transition motions in the demonstration dataset, robots showcase an emerging ability to transit naturally between distinct locomotion patterns as desired speed changes.
Development of a Whole-body Work Imitation Learning System by a Biped and Bi-armed Humanoid
Sep 27, 2023Imitation learning has been actively studied in recent years. In particular, skill acquisition by a robot with a fixed body, whose root link position and posture and camera angle of view do not change, has been realized in many cases. On the other hand, imitation of the behavior of robots with floating links, such as humanoid robots, is still a difficult task. In this study, we develop an imitation learning system using a biped robot with a floating link. There are two main problems in developing such a system. The first is a teleoperation device for humanoids, and the second is a control system that can withstand heavy workloads and long-term data collection. For the first point, we use the whole body control device TABLIS. It can control not only the arms but also the legs and can perform bilateral control with the robot. By connecting this TABLIS with the high-power humanoid robot JAXON, we construct a control system for imitation learning. For the second point, we will build a system that can collect long-term data based on posture optimization, and can simultaneously move the robot's limbs. We combine high-cycle posture generation with posture optimization methods, including whole-body joint torque minimization and contact force optimization. We designed an integrated system with the above two features to achieve various tasks through imitation learning. Finally, we demonstrate the effectiveness of this system by experiments of manipulating flexible fabrics such that not only the hands but also the head and waist move simultaneously, manipulating objects using legs characteristic of humanoids, and lifting heavy objects that require large forces.