 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlexible Morphing Aerial Robot with Inflatable Structure for Perching-based Human-Robot Interaction
Sep 09, 2025

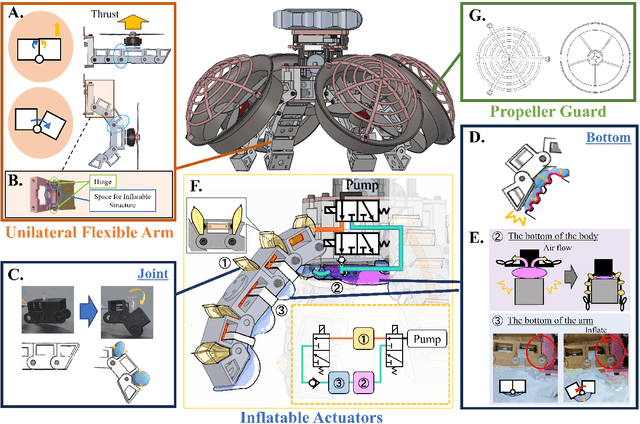

Birds in nature perform perching not only for rest but also for interaction with human such as the relationship with falconers. Recently, researchers achieve perching-capable aerial robots as a way to save energy, and deformable structure demonstrate significant advantages in efficiency of perching and compactness of configuration. However, ensuring flight stability remains challenging for deformable aerial robots due to the difficulty of controlling flexible arms. Furthermore, perching for human interaction requires high compliance along with safety. Thus, this study aims to develop a deformable aerial robot capable of perching on humans with high flexibility and grasping ability. To overcome the challenges of stability of both flight and perching, we propose a hybrid morphing structure that combines a unilateral flexible arm and a pneumatic inflatable actuators. This design allows the robot's arms to remain rigid during flight and soft while perching for more effective grasping. We also develop a pneumatic control system that optimizes pressure regulation while integrating shock absorption and adjustable grasping forces, enhancing interaction capabilities and energy efficiency. Besides, we focus on the structural characteristics of the unilateral flexible arm and identify sufficient conditions under which standard quadrotor modeling and control remain effective in terms of flight stability. Finally, the developed prototype demonstrates the feasibility of compliant perching maneuvers on humans, as well as the robust recovery even after arm deformation caused by thrust reductions during flight. To the best of our knowledge, this work is the first to achieve an aerial robot capable of perching on humans for interaction.
RAMIEL: A Parallel-Wire Driven Monopedal Robot for High and Continuous Jumping
Nov 08, 2023



Legged robots with high locomotive performance have been extensively studied, and various leg structures have been proposed. Especially, a leg structure that can achieve both continuous and high jumps is advantageous for moving around in a three-dimensional environment. In this study, we propose a parallel wire-driven leg structure, which has one DoF of linear motion and two DoFs of rotation and is controlled by six wires, as a structure that can achieve both continuous jumping and high jumping. The proposed structure can simultaneously achieve high controllability on each DoF, long acceleration distance and high power required for jumping. In order to verify the jumping performance of the parallel wire-driven leg structure, we have developed a parallel wire-driven monopedal robot, RAMIEL. RAMIEL is equipped with quasi-direct drive, high power wire winding mechanisms and a lightweight leg, and can achieve a maximum jumping height of 1.6 m and a maximum of seven continuous jumps.
HumanMimic: Learning Natural Locomotion and Transitions for Humanoid Robot via Wasserstein Adversarial Imitation
Sep 28, 2023



Transferring human motion skills to humanoid robots remains a significant challenge. In this study, we introduce a Wasserstein adversarial imitation learning system, allowing humanoid robots to replicate natural whole-body locomotion patterns and execute seamless transitions by mimicking human motions. First, we present a unified primitive-skeleton motion retargeting to mitigate morphological differences between arbitrary human demonstrators and humanoid robots. An adversarial critic component is integrated with Reinforcement Learning (RL) to guide the control policy to produce behaviors aligned with the data distribution of mixed reference motions. Additionally, we employ a specific Integral Probabilistic Metric (IPM), namely the Wasserstein-1 distance with a novel soft boundary constraint to stabilize the training process and prevent model collapse. Our system is evaluated on a full-sized humanoid JAXON in the simulator. The resulting control policy demonstrates a wide range of locomotion patterns, including standing, push-recovery, squat walking, human-like straight-leg walking, and dynamic running. Notably, even in the absence of transition motions in the demonstration dataset, robots showcase an emerging ability to transit naturally between distinct locomotion patterns as desired speed changes.
Development of a Whole-body Work Imitation Learning System by a Biped and Bi-armed Humanoid
Sep 27, 2023Imitation learning has been actively studied in recent years. In particular, skill acquisition by a robot with a fixed body, whose root link position and posture and camera angle of view do not change, has been realized in many cases. On the other hand, imitation of the behavior of robots with floating links, such as humanoid robots, is still a difficult task. In this study, we develop an imitation learning system using a biped robot with a floating link. There are two main problems in developing such a system. The first is a teleoperation device for humanoids, and the second is a control system that can withstand heavy workloads and long-term data collection. For the first point, we use the whole body control device TABLIS. It can control not only the arms but also the legs and can perform bilateral control with the robot. By connecting this TABLIS with the high-power humanoid robot JAXON, we construct a control system for imitation learning. For the second point, we will build a system that can collect long-term data based on posture optimization, and can simultaneously move the robot's limbs. We combine high-cycle posture generation with posture optimization methods, including whole-body joint torque minimization and contact force optimization. We designed an integrated system with the above two features to achieve various tasks through imitation learning. Finally, we demonstrate the effectiveness of this system by experiments of manipulating flexible fabrics such that not only the hands but also the head and waist move simultaneously, manipulating objects using legs characteristic of humanoids, and lifting heavy objects that require large forces.