 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMEVIUS2: Practical Open-Source Quadruped Robot with Sheet Metal Welding and Multimodal Perception
Mar 23, 2026Various quadruped robots have been developed to date, and thanks to reinforcement learning, they are now capable of traversing diverse types of rough terrain. In parallel, there is a growing trend of releasing these robot designs as open-source, enabling researchers to freely build and modify robots themselves. However, most existing open-source quadruped robots have been designed with 3D printing in mind, resulting in structurally fragile systems that do not scale well in size, leading to the construction of relatively small robots. Although a few open-source quadruped robots constructed with metal components exist, they still tend to be small in size and lack multimodal sensors for perception, making them less practical. In this study, we developed MEVIUS2, an open-source quadruped robot with a size comparable to Boston Dynamics' Spot, whose structural components can all be ordered through e-commerce services. By leveraging sheet metal welding and metal machining, we achieved a large, highly durable body structure while reducing the number of individual parts. Furthermore, by integrating sensors such as LiDARs and a high dynamic range camera, the robot is capable of detailed perception of its surroundings, making it more practical than previous open-source quadruped robots. We experimentally validated that MEVIUS2 can traverse various types of rough terrain and demonstrated its environmental perception capabilities. All hardware, software, and training environments can be obtained from Supplementary Materials or https://github.com/haraduka/mevius2.
MEVITA: Open-Source Bipedal Robot Assembled from E-Commerce Components via Sheet Metal Welding
Aug 25, 2025Various bipedal robots have been developed to date, and in recent years, there has been a growing trend toward releasing these robots as open-source platforms. This shift is fostering an environment in which anyone can freely develop bipedal robots and share their knowledge, rather than relying solely on commercial products. However, most existing open-source bipedal robots are designed to be fabricated using 3D printers, which limits their scalability in size and often results in fragile structures. On the other hand, some metal-based bipedal robots have been developed, but they typically involve a large number of components, making assembly difficult, and in some cases, the parts themselves are not readily available through e-commerce platforms. To address these issues, we developed MEVITA, an open-source bipedal robot that can be built entirely from components available via e-commerce. Aiming for the minimal viable configuration for a bipedal robot, we utilized sheet metal welding to integrate complex geometries into single parts, thereby significantly reducing the number of components and enabling easy assembly for anyone. Through reinforcement learning in simulation and Sim-to-Real transfer, we demonstrated robust walking behaviors across various environments, confirming the effectiveness of our approach. All hardware, software, and training environments can be obtained from https://github.com/haraduka/mevita .
KLEIYN : A Quadruped Robot with an Active Waist for Both Locomotion and Wall Climbing
Jul 09, 2025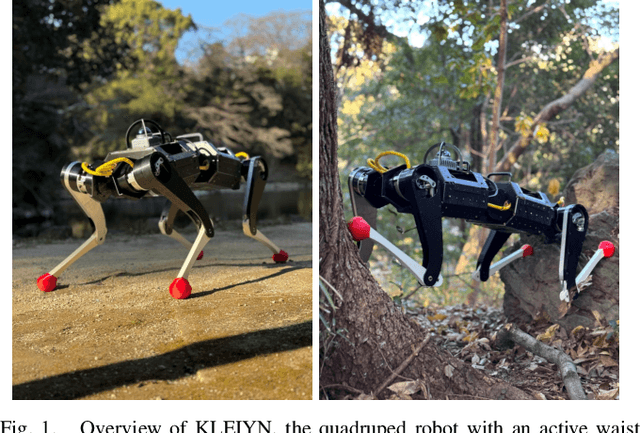
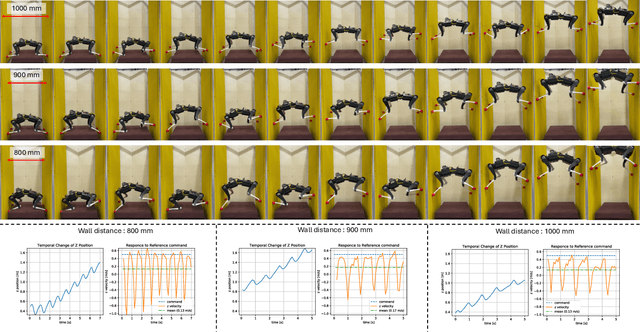
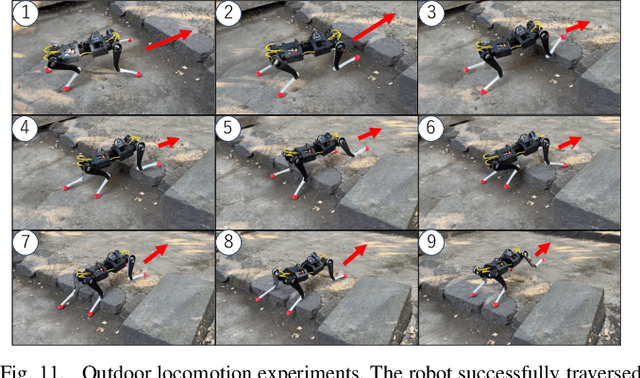
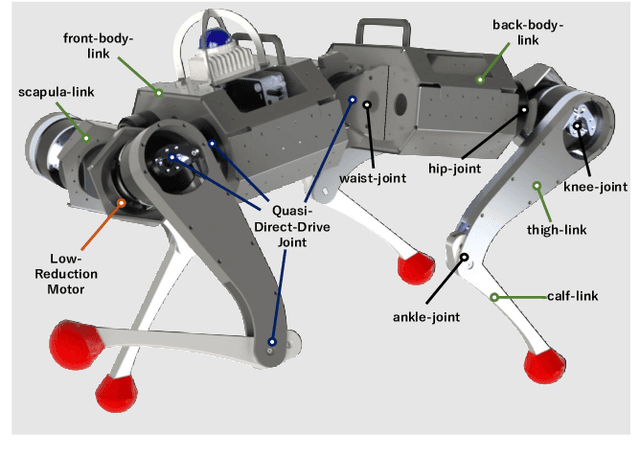
In recent years, advancements in hardware have enabled quadruped robots to operate with high power and speed, while robust locomotion control using reinforcement learning (RL) has also been realized. As a result, expectations are rising for the automation of tasks such as material transport and exploration in unknown environments. However, autonomous locomotion in rough terrains with significant height variations requires vertical movement, and robots capable of performing such movements stably, along with their control methods, have not yet been fully established. In this study, we developed the quadruped robot KLEIYN, which features a waist joint, and aimed to expand quadruped locomotion by enabling chimney climbing through RL. To facilitate the learning of vertical motion, we introduced Contact-Guided Curriculum Learning (CGCL). As a result, KLEIYN successfully climbed walls ranging from 800 mm to 1000 mm in width at an average speed of 150 mm/s, 50 times faster than conventional robots. Furthermore, we demonstrated that the introduction of a waist joint improves climbing performance, particularly enhancing tracking ability on narrow walls.
Vlimb: A Wire-Driven Wearable Robot for Bodily Extension, Balancing Powerfulness and Reachability
Nov 14, 2024Numerous wearable robots have been developed to meet the demands of physical assistance and entertainment. These wearable robots range from body-enhancing types that assist human arms and legs to body-extending types that have extra arms. This study focuses specifically on wearable robots of the latter category, aimed at bodily extension. However, they have not yet achieved the level of powerfulness and reachability equivalent to that of human limbs, limiting their application to entertainment and manipulation tasks involving lightweight objects. Therefore, in this study, we develop an body-extending wearable robot, Vlimb, which has enough powerfulness to lift a human and can perform manipulation. Leveraging the advantages of tendon-driven mechanisms, Vlimb incorporates a wire routing mechanism capable of accommodating both delicate manipulations and robust lifting tasks. Moreover, by introducing a passive ring structure to overcome the limited reachability inherent in tendon-driven mechanisms, Vlimb achieves both the powerfulness and reachability comparable to that of humans. This paper outlines the design methodology of Vlimb, conducts preliminary manipulation and lifting tasks, and verifies its effectiveness.
CubiXMusashi: Fusion of Wire-Driven CubiX and Musculoskeletal Humanoid Musashi toward Unlimited Performance
Oct 31, 2024Humanoids exhibit a wide variety in terms of joint configuration, actuators, and degrees of freedom, resulting in different achievable movements and tasks for each type. Particularly, musculoskeletal humanoids are developed to closely emulate human body structure and movement functions, consisting of a skeletal framework driven by numerous muscle actuators. The redundant arrangement of muscles relative to the skeletal degrees of freedom has been used to represent the flexible and complex body movements observed in humans. However, due to this flexible body and high degrees of freedom, modeling, simulation, and control become extremely challenging, limiting the feasible movements and tasks. In this study, we integrate the musculoskeletal humanoid Musashi with the wire-driven robot CubiX, capable of connecting to the environment, to form CubiXMusashi. This combination addresses the shortcomings of traditional musculoskeletal humanoids and enables movements beyond the capabilities of other humanoids. CubiXMusashi connects to the environment with wires and drives by winding them, successfully achieving movements such as pull-up, rising from a lying pose, and mid-air kicking, which are difficult for Musashi alone. This concept demonstrates that various humanoids, not limited to musculoskeletal humanoids, can mitigate their physical constraints and acquire new abilities by connecting to the environment and driving through wires.
Design Method of a Kangaroo Robot with High Power Legs and an Articulated Soft Tail
Oct 10, 2024In this paper, we focus on the kangaroo, which has powerful legs capable of jumping and a soft and strong tail. To incorporate these unique structure into a robot for utilization, we propose a design method that takes into account both the feasibility as a robot and the kangaroo-mimetic structure. Based on the kangaroo's musculoskeletal structure, we determine the structure of the robot that enables it to jump by analyzing the muscle arrangement and prior verification in simulation. Also, to realize a tail capable of body support, we use an articulated, elastic structure as a tail. In order to achieve both softness and high power output, the robot is driven by a direct-drive, high-power wire-winding mechanism, and weight of legs and the tail is reduced by placing motors in the torso. The developed kangaroo robot can jump with its hind legs, moving its tail, and supporting its body using its hind legs and tail.
CubiX: Portable Wire-Driven Parallel Robot Connecting to and Utilizing the Environment
Oct 08, 2024A wire-driven parallel robot is a type of robotic system where multiple wires are used to control the movement of a end-effector. The wires are attached to the end-effector and anchored to fixed points on external structures. This configuration allows for the separation of actuators and end-effectors, enabling lightweight and simplified movable parts in the robot. However, its range of motion remains confined within the space formed by the wires, limiting the wire-driven capability to only within the pre-designed operational range. Here, in this study, we develop a wire-driven robot, CubiX, capable of connecting to and utilizing the environment. CubiX connects itself to the environment using up to 8 wires and drives itself by winding these wires. By integrating actuators for winding the wires into CubiX, a portable wire-driven parallel robot is realized without limitations on its workspace. Consequently, the robot can form parallel wire-driven structures by connecting wires to the environment at any operational location.
Learning of Balance Controller Considering Changes in Body State for Musculoskeletal Humanoids
May 20, 2024The musculoskeletal humanoid is difficult to modelize due to the flexibility and redundancy of its body, whose state can change over time, and so balance control of its legs is challenging. There are some cases where ordinary PID controls may cause instability. In this study, to solve these problems, we propose a method of learning a correlation model among the joint angle, muscle tension, and muscle length of the ankle and the zero moment point to perform balance control. In addition, information on the changing body state is embedded in the model using parametric bias, and the model estimates and adapts to the current body state by learning this information online. This makes it possible to adapt to changes in upper body posture that are not directly taken into account in the model, since it is difficult to learn the complete dynamics of the whole body considering the amount of data and computation. The model can also adapt to changes in body state, such as the change in footwear and change in the joint origin due to recalibration. The effectiveness of this method is verified by a simulation and by using an actual musculoskeletal humanoid, Musashi.
Hardware Design and Learning-Based Software Architecture of Musculoskeletal Wheeled Robot Musashi-W for Real-World Applications
Mar 18, 2024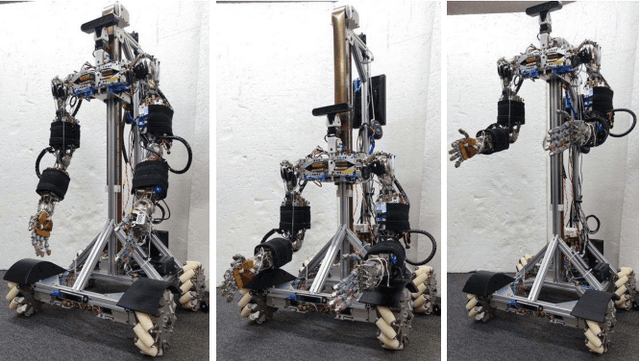
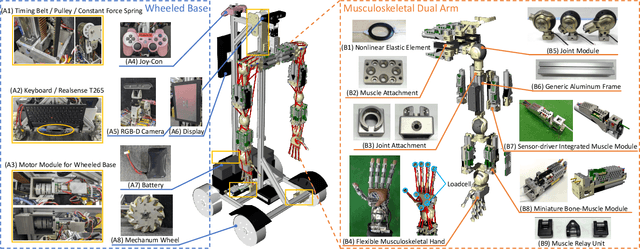
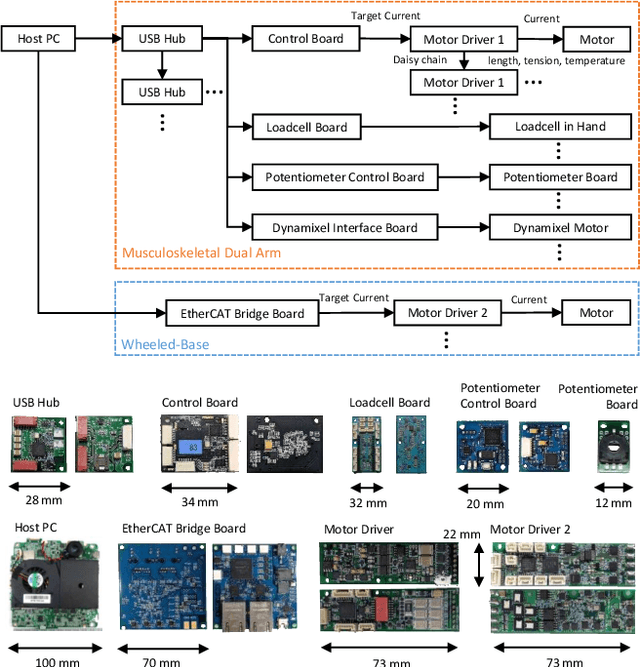
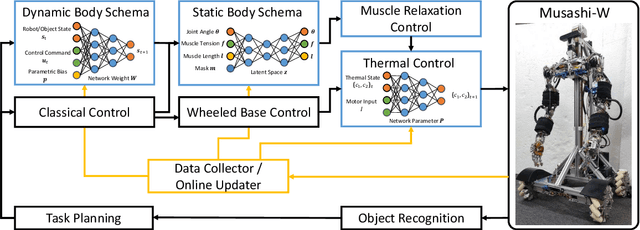
Various musculoskeletal humanoids have been developed so far. While these humanoids have the advantage of their flexible and redundant bodies that mimic the human body, they are still far from being applied to real-world tasks. One of the reasons for this is the difficulty of bipedal walking in a flexible body. Thus, we developed a musculoskeletal wheeled robot, Musashi-W, by combining a wheeled base and musculoskeletal upper limbs for real-world applications. Also, we constructed its software system by combining static and dynamic body schema learning, reflex control, and visual recognition. We show that the hardware and software of Musashi-W can make the most of the advantages of the musculoskeletal upper limbs, through several tasks of cleaning by human teaching, carrying a heavy object considering muscle addition, and setting a table through dynamic cloth manipulation with variable stiffness.
Continuous Jumping of a Parallel Wire-Driven Monopedal Robot RAMIEL Using Reinforcement Learning
Mar 17, 2024



We have developed a parallel wire-driven monopedal robot, RAMIEL, which has both speed and power due to the parallel wire mechanism and a long acceleration distance. RAMIEL is capable of jumping high and continuously, and so has high performance in traveling. On the other hand, one of the drawbacks of a minimal parallel wire-driven robot without joint encoders is that the current joint velocities estimated from the wire lengths oscillate due to the elongation of the wires, making the values unreliable. Therefore, despite its high performance, the control of the robot is unstable, and in 10 out of 16 jumps, the robot could only jump up to two times continuously. In this study, we propose a method to realize a continuous jumping motion by reinforcement learning in simulation, and its application to the actual robot. Because the joint velocities oscillate with the elongation of the wires, they are not used directly, but instead are inferred from the time series of joint angles. At the same time, noise that imitates the vibration caused by the elongation of the wires is added for transfer to the actual robot. The results show that the system can be applied to the actual robot RAMIEL as well as to the stable continuous jumping motion in simulation.