 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
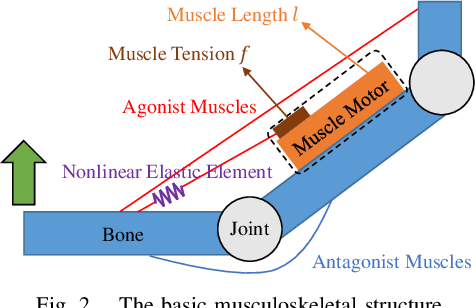
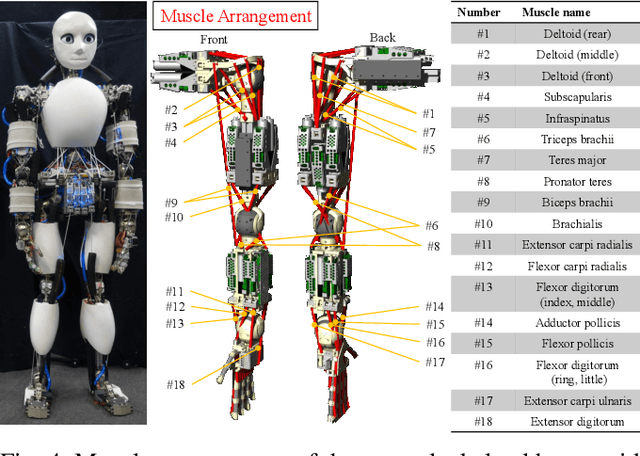
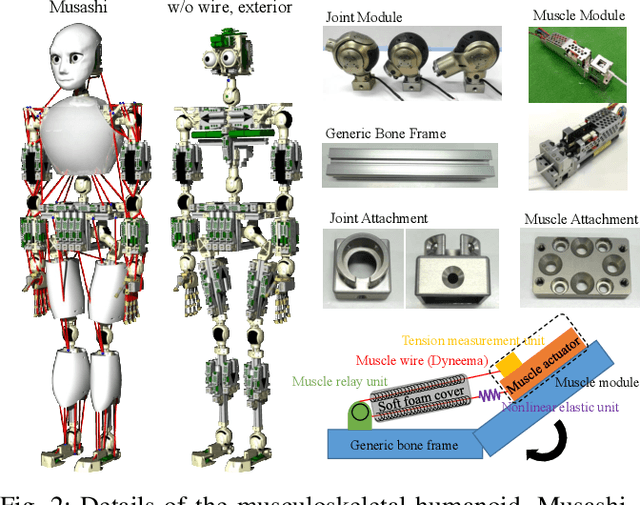
Add to EdgeCharacteristics, Management, and Utilization of Muscles in Musculoskeletal Humanoids: Empirical Study on Kengoro and Musashi
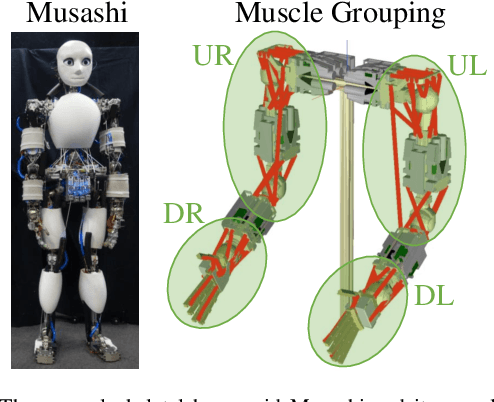
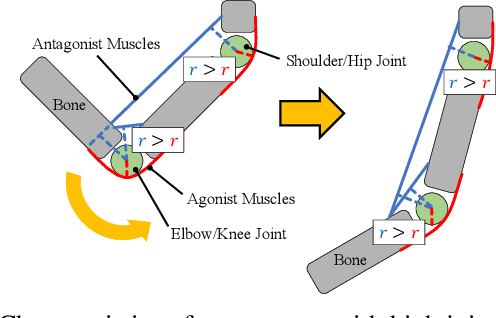
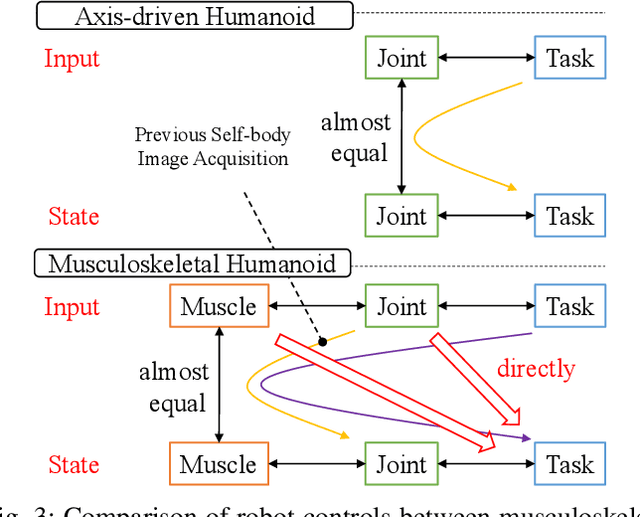
Feb 09, 2026Various musculoskeletal humanoids have been developed so far, and numerous studies on control mechanisms have been conducted to leverage the advantages of their biomimetic bodies. However, there has not been sufficient and unified discussion on the diverse properties inherent in these musculoskeletal structures, nor on how to manage and utilize them. Therefore, this study categorizes and analyzes the characteristics of muscles, as well as their management and utilization methods, based on the various research conducted on the musculoskeletal humanoids we have developed, Kengoro and Musashi. We classify the features of the musculoskeletal structure into five properties: Redundancy, Independency, Anisotropy, Variable Moment Arm, and Nonlinear Elasticity. We then organize the diverse advantages and disadvantages of musculoskeletal humanoids that arise from the combination of these properties. In particular, we discuss body schema learning and reflex control, along with muscle grouping and body schema adaptation. Also, we describe the implementation of movements through an integrated system and discuss future challenges and prospects.
Flexible Morphing Aerial Robot with Inflatable Structure for Perching-based Human-Robot Interaction
Sep 09, 2025

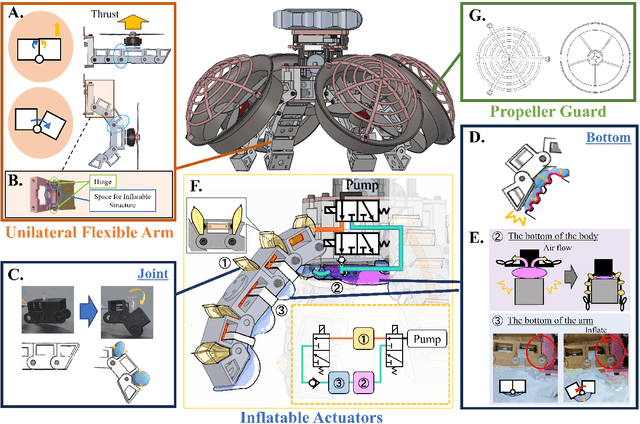

Birds in nature perform perching not only for rest but also for interaction with human such as the relationship with falconers. Recently, researchers achieve perching-capable aerial robots as a way to save energy, and deformable structure demonstrate significant advantages in efficiency of perching and compactness of configuration. However, ensuring flight stability remains challenging for deformable aerial robots due to the difficulty of controlling flexible arms. Furthermore, perching for human interaction requires high compliance along with safety. Thus, this study aims to develop a deformable aerial robot capable of perching on humans with high flexibility and grasping ability. To overcome the challenges of stability of both flight and perching, we propose a hybrid morphing structure that combines a unilateral flexible arm and a pneumatic inflatable actuators. This design allows the robot's arms to remain rigid during flight and soft while perching for more effective grasping. We also develop a pneumatic control system that optimizes pressure regulation while integrating shock absorption and adjustable grasping forces, enhancing interaction capabilities and energy efficiency. Besides, we focus on the structural characteristics of the unilateral flexible arm and identify sufficient conditions under which standard quadrotor modeling and control remain effective in terms of flight stability. Finally, the developed prototype demonstrates the feasibility of compliant perching maneuvers on humans, as well as the robust recovery even after arm deformation caused by thrust reductions during flight. To the best of our knowledge, this work is the first to achieve an aerial robot capable of perching on humans for interaction.
Optimization-based Posture Generation for Whole-body Contact Motion by Contact Point Search on the Body Surface
May 29, 2025Whole-body contact is an effective strategy for improving the stability and efficiency of the motion of robots. For robots to automatically perform such motions, we propose a posture generation method that employs all available surfaces of the robot links. By representing the contact point on the body surface by two-dimensional configuration variables, the joint positions and contact points are simultaneously determined through a gradient-based optimization. By generating motions with the proposed method, we present experiments in which robots manipulate objects effectively utilizing whole-body contact.
Stability Recognition with Active Vibration for Bracing Behaviors and Motion Extensions Using Environment in Musculoskeletal Humanoids
Feb 22, 2025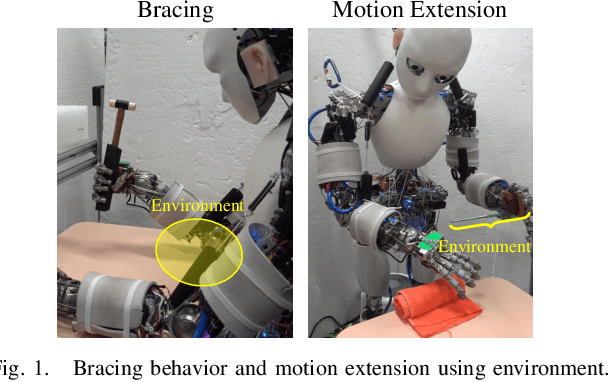
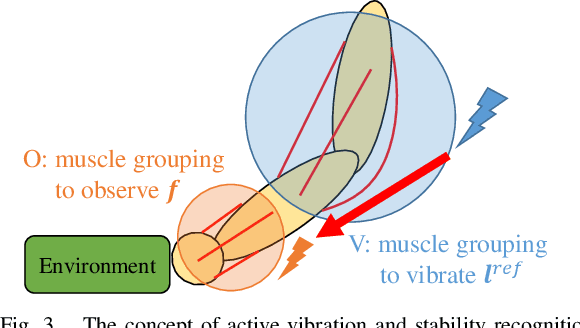
Although robots with flexible bodies are superior in terms of the contact and adaptability, it is difficult to control them precisely. On the other hand, human beings make use of the surrounding environments to stabilize their bodies and control their movements. In this study, we propose a method for the bracing motion and extension of the range of motion using the environment for the musculoskeletal humanoid. Here, it is necessary to recognize the stability of the body when contacting the environment, and we develop a method to measure it by using the change in sensor values of the body when actively vibrating a part of the body. Experiments are conducted using the musculoskeletal humanoid Musashi, and the effectiveness of this method is confirmed.
Reflex-based Motion Strategy of Musculoskeletal Humanoids under Environmental Contact Using Muscle Relaxation Control
Feb 22, 2025



The musculoskeletal humanoid can move well under environmental contact thanks to its body softness. However, there are few studies that actively make use of the environment to rest its flexible musculoskeletal body. Also, its complex musculoskeletal structure is difficult to modelize and high internal muscle tension sometimes occurs. To solve these problems, we develop a muscle relaxation control which can minimize the muscle tension by actively using the environment and inhibit useless internal muscle tension. We apply this control to some basic movements, the motion of resting the arms on the desk, and handle operation, and verify its effectiveness.
Online Learning of Danger Avoidance for Complex Structures of Musculoskeletal Humanoids and Its Applications
Feb 22, 2025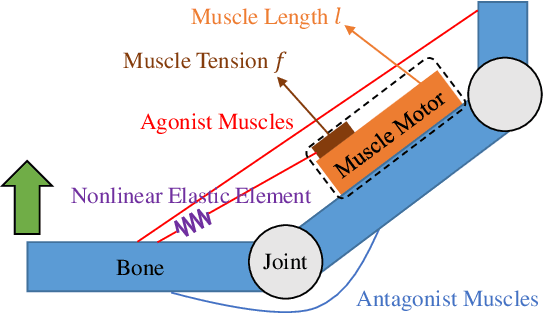
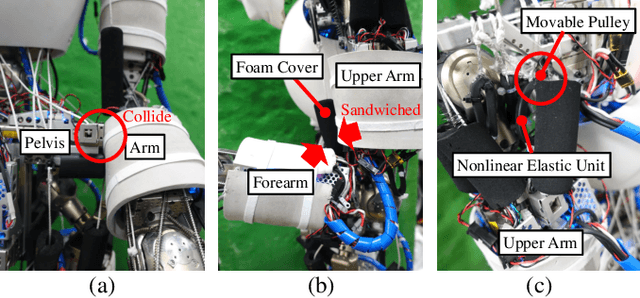
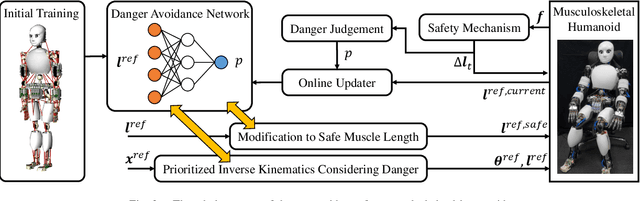
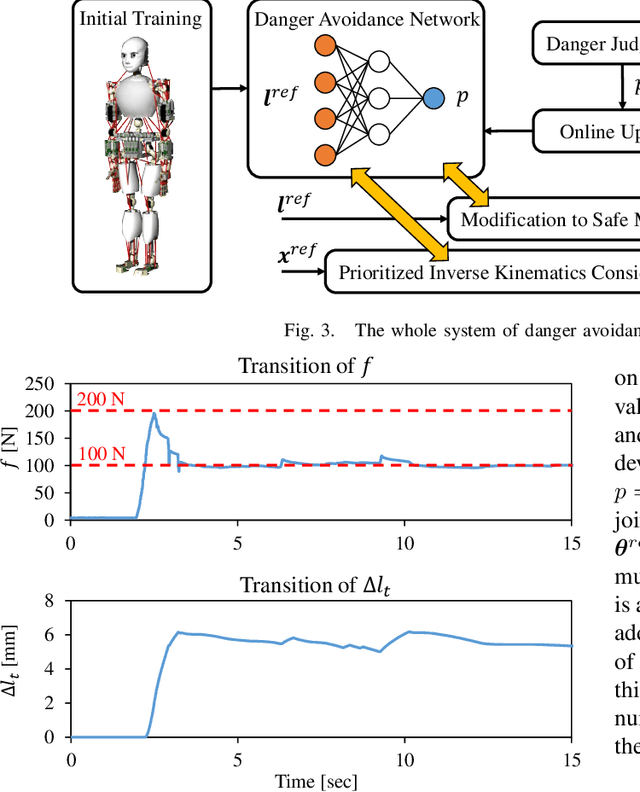
The complex structure of musculoskeletal humanoids makes it difficult to model them, and the inter-body interference and high internal muscle force are unavoidable. Although various safety mechanisms have been developed to solve this problem, it is important not only to deal with the dangers when they occur but also to prevent them from happening. In this study, we propose a method to learn a network outputting danger probability corresponding to the muscle length online so that the robot can gradually prevent dangers from occurring. Applications of this network for control are also described. The method is applied to the musculoskeletal humanoid, Musashi, and its effectiveness is verified.
Exceeding the Maximum Speed Limit of the Joint Angle for the Redundant Tendon-driven Structures of Musculoskeletal Humanoids
Feb 18, 2025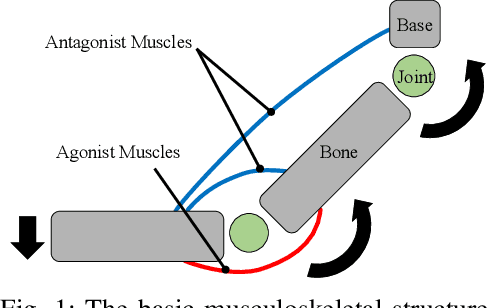
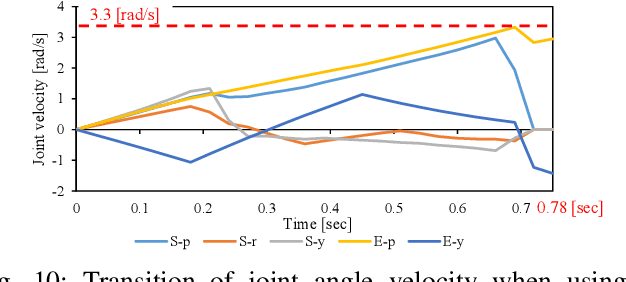
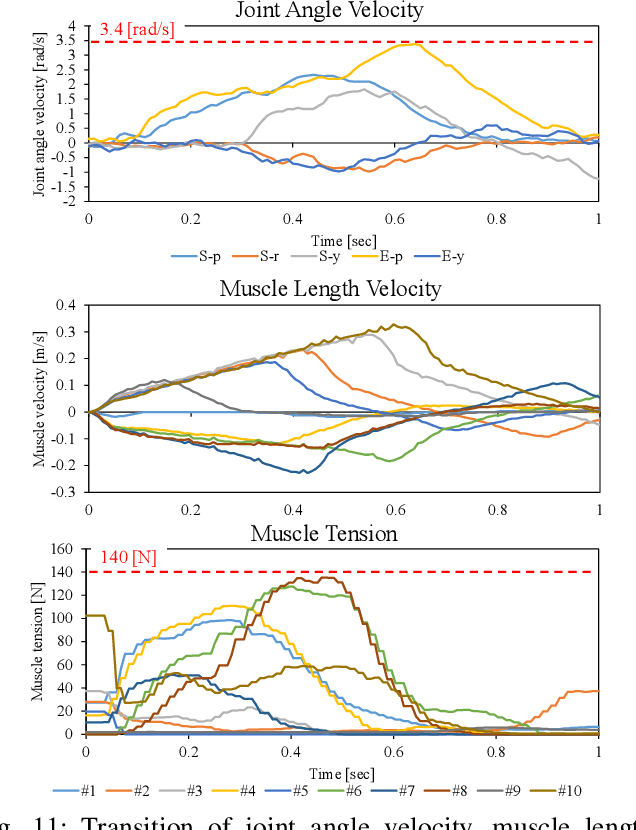
The musculoskeletal humanoid has various biomimetic benefits, and the redundant muscle arrangement is one of its most important characteristics. This redundancy can achieve fail-safe redundant actuation and variable stiffness control. However, there is a problem that the maximum joint angle velocity is limited by the slowest muscle among the redundant muscles. In this study, we propose two methods that can exceed the limited maximum joint angle velocity, and verify the effectiveness with actual robot experiments.
Applications of Stretch Reflex for the Upper Limb of Musculoskeletal Humanoids: Protective Behavior, Postural Stability, and Active Induction
Feb 18, 2025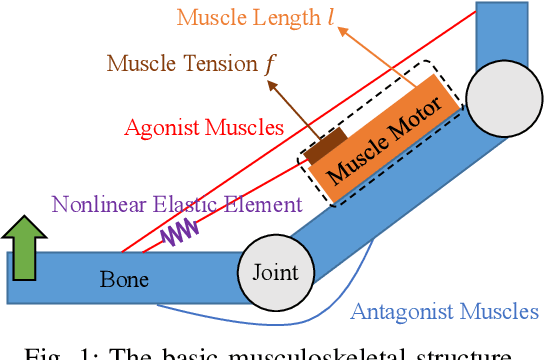
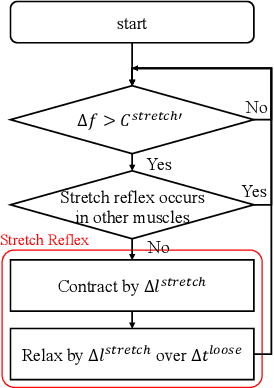
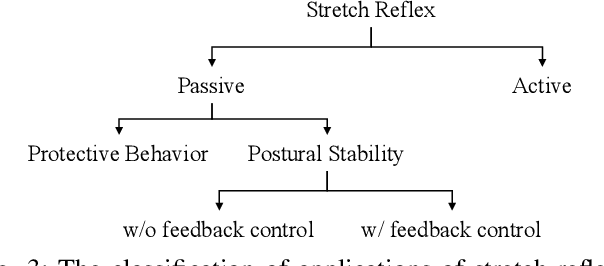
The musculoskeletal humanoid has various biomimetic benefits, and it is important that we can embed and evaluate human reflexes in the actual robot. Although stretch reflex has been implemented in lower limbs of musculoskeletal humanoids, we apply it to the upper limb to discover its useful applications. We consider the implementation of stretch reflex in the actual robot, its active/passive applications, and the change in behavior according to the difference of parameters.
Design Optimization of Musculoskeletal Humanoids with Maximization of Redundancy to Compensate for Muscle Rupture
Feb 18, 2025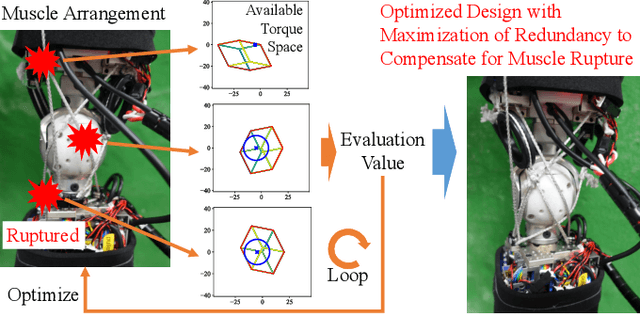

Musculoskeletal humanoids have various biomimetic advantages, and the redundant muscle arrangement allowing for variable stiffness control is one of the most important. In this study, we focus on one feature of the redundancy, which enables the humanoid to keep moving even if one of its muscles breaks, an advantage that has not been dealt with in many studies. In order to make the most of this advantage, the design of muscle arrangement is optimized by considering the maximization of minimum available torque that can be exerted when one muscle breaks. This method is applied to the elbow of a musculoskeletal humanoid Musashi with simulations, the design policy is extracted from the optimization results, and its effectiveness is confirmed with the actual robot.
Task-specific Self-body Controller Acquisition by Musculoskeletal Humanoids: Application to Pedal Control in Autonomous Driving
Dec 11, 2024
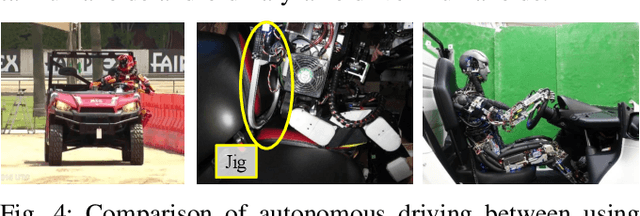
The musculoskeletal humanoid has many benefits that human beings have, but the modeling of its complex flexible body is difficult. Although we have developed an online acquisition method of the nonlinear relationship between joints and muscles, we could not completely match the actual robot and its self-body image. When realizing a certain task, the direct relationship between the control input and task state needs to be learned. So, we construct a neural network representing the time-series relationship between the control input and task state, and realize the intended task state by applying the network to a real-time control. In this research, we conduct accelerator pedal control experiments as one application, and verify the effectiveness of this study.