 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign Optimization of Musculoskeletal Humanoids with Maximization of Redundancy to Compensate for Muscle Rupture
Paper and Code
Feb 18, 2025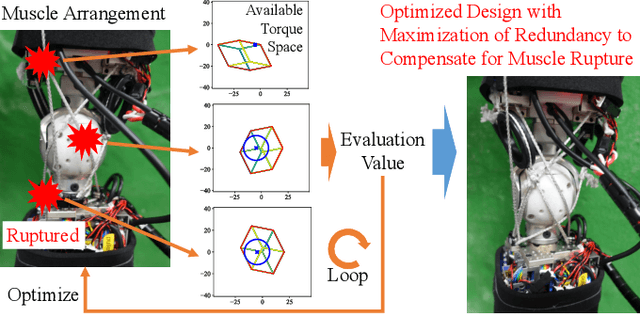

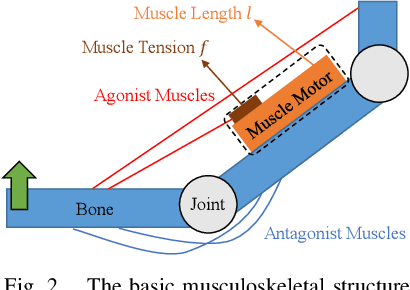
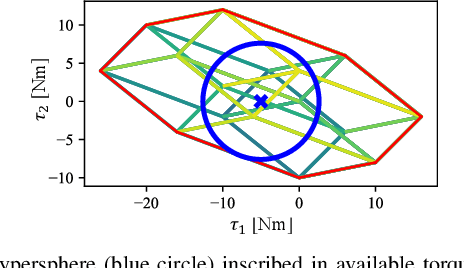
Musculoskeletal humanoids have various biomimetic advantages, and the redundant muscle arrangement allowing for variable stiffness control is one of the most important. In this study, we focus on one feature of the redundancy, which enables the humanoid to keep moving even if one of its muscles breaks, an advantage that has not been dealt with in many studies. In order to make the most of this advantage, the design of muscle arrangement is optimized by considering the maximization of minimum available torque that can be exerted when one muscle breaks. This method is applied to the elbow of a musculoskeletal humanoid Musashi with simulations, the design policy is extracted from the optimization results, and its effectiveness is confirmed with the actual robot.