 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Benchmark of Dexterity for Anthropomorphic Robotic Hands
Apr 10, 2026Dexterity is a central yet ambiguously defined concept in the design and evaluation of anthropomorphic robotic hands. In practice, the term is often used inconsistently, with different systems evaluated under disparate criteria, making meaningful comparisons across designs difficult. This highlights the need for a unified, performance-based definition of dexterity grounded in measurable outcomes rather than proxy metrics. In this work, we introduce POMDAR, a comprehensive dexterity benchmark that formalizes dexterity as task performance across a structured set of manipulation and grasping motions. The benchmark was systematically derived from established taxonomies in human motor control. It is implemented in both real-world and simulation and includes four manipulation configurations: vertical and horizontal configurations, continuous rotation, and pure grasping. The task designs contain mechanical scaffolding to constrain task motion, suppress compensatory strategies, and enable metrics to be measured unambiguously. We define a quantitative scoring metric combining task correctness and execution speed, effectively measuring dexterity as throughput. This enables objective, reproducible, and interpretable evaluation across different hand designs. POMDAR provides an open-source, standardized, and taxonomy-grounded benchmark for consistent comparison and evaluation of anthropomorphic robot hands to facilitate a systematic advancement of dexterous manipulation platforms. CAD, simulation files, and evaluation videos are publicly available at https://srl-ethz.github.io/POMDAR/.
A Sensorless, Inherently Compliant Anthropomorphic Musculoskeletal Hand Driven by Electrohydraulic Actuators
Mar 25, 2026Robotic manipulation in unstructured environments requires end-effectors that combine high kinematic dexterity with physical compliance. While traditional rigid hands rely on complex external sensors for safe interaction, electrohydraulic actuators offer a promising alternative. This paper presents the design, control, and evaluation of a novel musculoskeletal robotic hand architecture powered entirely by remote Peano-HASEL actuators, specifically optimized for safe manipulation. By relocating the actuators to the forearm, we functionally isolate the grasping interface from electrical hazards while maintaining a slim, human-like profile. To address the inherently limited linear contraction of these soft actuators, we integrate a 1:2 pulley routing mechanism that mechanically amplifies tendon displacement. The resulting system prioritizes compliant interaction over high payload capacity, leveraging the intrinsic force-limiting characteristics of the actuators to provide a high level of inherent safety. Furthermore, this physical safety is augmented by the self-sensing nature of the HASEL actuators. By simply monitoring the operating current, we achieve real-time grasp detection and closed-loop contact-aware control without relying on external force transducers or encoders. Experimental results validate the system's dexterity and inherent safety, demonstrating the successful execution of various grasp taxonomies and the non-destructive grasping of highly fragile objects, such as a paper balloon. These findings highlight a significant step toward simplified, inherently compliant soft robotic manipulation.
Stability Recognition with Active Vibration for Bracing Behaviors and Motion Extensions Using Environment in Musculoskeletal Humanoids
Feb 22, 2025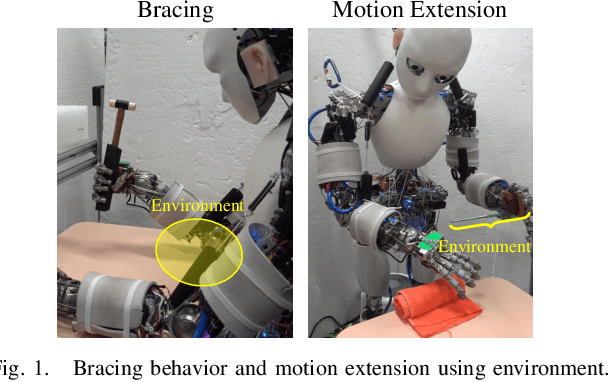
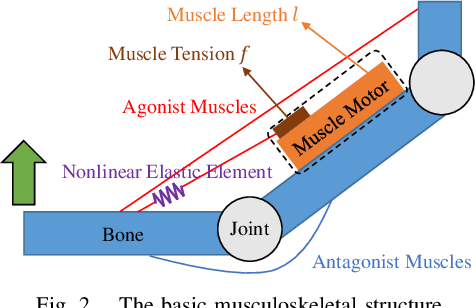
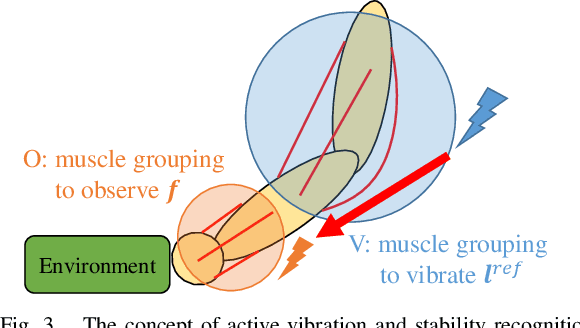
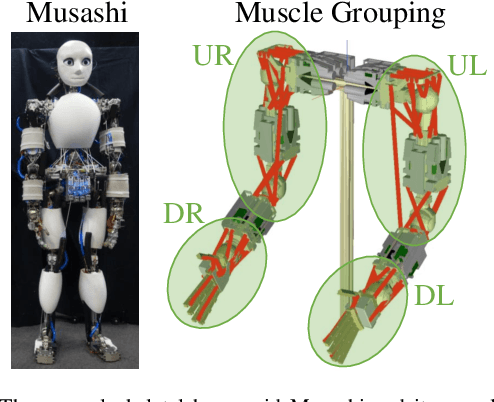
Although robots with flexible bodies are superior in terms of the contact and adaptability, it is difficult to control them precisely. On the other hand, human beings make use of the surrounding environments to stabilize their bodies and control their movements. In this study, we propose a method for the bracing motion and extension of the range of motion using the environment for the musculoskeletal humanoid. Here, it is necessary to recognize the stability of the body when contacting the environment, and we develop a method to measure it by using the change in sensor values of the body when actively vibrating a part of the body. Experiments are conducted using the musculoskeletal humanoid Musashi, and the effectiveness of this method is confirmed.
Design Optimization of Musculoskeletal Humanoids with Maximization of Redundancy to Compensate for Muscle Rupture
Feb 18, 2025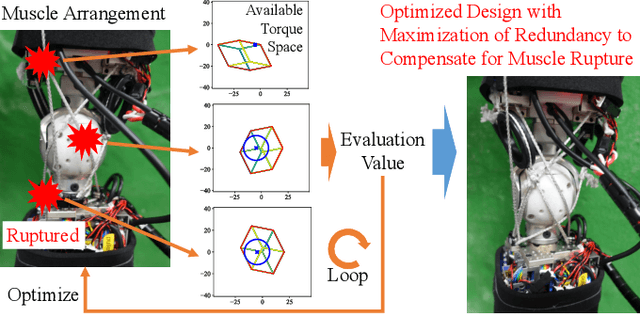

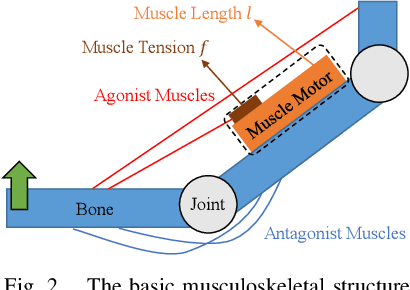
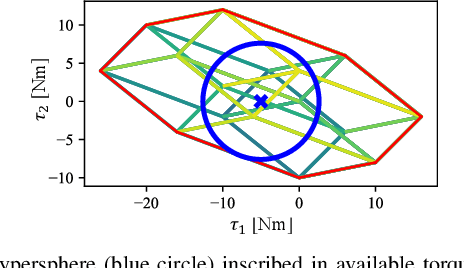
Musculoskeletal humanoids have various biomimetic advantages, and the redundant muscle arrangement allowing for variable stiffness control is one of the most important. In this study, we focus on one feature of the redundancy, which enables the humanoid to keep moving even if one of its muscles breaks, an advantage that has not been dealt with in many studies. In order to make the most of this advantage, the design of muscle arrangement is optimized by considering the maximization of minimum available torque that can be exerted when one muscle breaks. This method is applied to the elbow of a musculoskeletal humanoid Musashi with simulations, the design policy is extracted from the optimization results, and its effectiveness is confirmed with the actual robot.
Self-Body Image Acquisition and Posture Generation with Redundancy using Musculoskeletal Humanoid Shoulder Complex for Object Manipulation
Nov 10, 2024



We proposed a method for learning the actual body image of a musculoskeletal humanoid for posture generation and object manipulation using inverse kinematics with redundancy in the shoulder complex. The effectiveness of this method was confirmed by realizing automobile steering wheel operation. The shoulder complex has a scapula that glides over the rib cage and an open spherical joint, and is supported by numerous muscle groups, enabling a wide range of motion. As a development of the human mimetic shoulder complex, we have increased the muscle redundancy by implementing deep muscles and stabilize the joint drive. As a posture generation method to utilize the joint redundancy of the shoulder complex, we consider inverse kinematics based on the scapular drive strategy suggested by the scapulohumeral rhythm of the human body. In order to control a complex robot imitating a human body, it is essential to learn its own body image, but it is difficult to know its own state accurately due to its deformation which is difficult to measure. To solve this problem, we developed a method to acquire a self-body image that can be updated appropriately by recognizing the hand position relative to an object for the purpose of object manipulation. We apply the above methods to a full-body musculoskeletal humanoid, Kengoro, and confirm its effectiveness by conducting an experiment to operate a car steering wheel, which requires the appropriate use of both arms.
Adaptive Body Schema Learning System Considering Additional Muscles for Musculoskeletal Humanoids
Nov 10, 2024



One of the important advantages of musculoskeletal humanoids is that the muscle arrangement can be easily changed and the number of muscles can be increased according to the situation. In this study, we describe an overall system of muscle addition for musculoskeletal humanoids and the adaptive body schema learning while taking into account the additional muscles. For hardware, we describe a modular body design that can be fitted with additional muscles, and for software, we describe a method that can learn the changes in body schema associated with additional muscles from a small amount of motion data. We apply our method to a simple 1-DOF tendon-driven robot simulation and the arm of the musculoskeletal humanoid Musashi, and show the effectiveness of muscle tension relaxation by adding muscles for a high-load task.
Human-mimetic binaural ear design and sound source direction estimation for task realization of musculoskeletal humanoids
Sep 10, 2024Human-like environment recognition by musculoskeletal humanoids is important for task realization in real complex environments and for use as dummies for test subjects. Humans integrate various sensory information to perceive their surroundings, and hearing is particularly useful for recognizing objects out of view or out of touch. In this research, we aim to realize human-like auditory environmental recognition and task realization for musculoskeletal humanoids by equipping them with a human-like auditory processing system. Humans realize sound-based environmental recognition by estimating directions of the sound sources and detecting environmental sounds based on changes in the time and frequency domain of incoming sounds and the integration of auditory information in the central nervous system. We propose a human mimetic auditory information processing system, which consists of three components: the human mimetic binaural ear unit, which mimics human ear structure and characteristics, the sound source direction estimation system, and the environmental sound detection system, which mimics processing in the central nervous system. We apply it to Musashi, a human mimetic musculoskeletal humanoid, and have it perform tasks that require sound information outside of view in real noisy environments to confirm the usefulness of the proposed methods.
Automatic Grouping of Redundant Sensors and Actuators Using Functional and Spatial Connections: Application to Muscle Grouping for Musculoskeletal Humanoids
Sep 01, 2024For a robot with redundant sensors and actuators distributed throughout its body, it is difficult to construct a controller or a neural network using all of them due to computational cost and complexity. Therefore, it is effective to extract functionally related sensors and actuators, group them, and construct a controller or a network for each of these groups. In this study, the functional and spatial connections among sensors and actuators are embedded into a graph structure and a method for automatic grouping is developed. Taking a musculoskeletal humanoid with a large number of redundant muscles as an example, this method automatically divides all the muscles into regions such as the forearm, upper arm, scapula, neck, etc., which has been done by humans based on a geometric model. The functional relationship among the muscles and the spatial relationship of the neural connections are calculated without a geometric model.
Learning of Balance Controller Considering Changes in Body State for Musculoskeletal Humanoids
May 20, 2024The musculoskeletal humanoid is difficult to modelize due to the flexibility and redundancy of its body, whose state can change over time, and so balance control of its legs is challenging. There are some cases where ordinary PID controls may cause instability. In this study, to solve these problems, we propose a method of learning a correlation model among the joint angle, muscle tension, and muscle length of the ankle and the zero moment point to perform balance control. In addition, information on the changing body state is embedded in the model using parametric bias, and the model estimates and adapts to the current body state by learning this information online. This makes it possible to adapt to changes in upper body posture that are not directly taken into account in the model, since it is difficult to learn the complete dynamics of the whole body considering the amount of data and computation. The model can also adapt to changes in body state, such as the change in footwear and change in the joint origin due to recalibration. The effectiveness of this method is verified by a simulation and by using an actual musculoskeletal humanoid, Musashi.
Leveraging Pretrained Latent Representations for Few-Shot Imitation Learning on a Dexterous Robotic Hand
Apr 25, 2024In the context of imitation learning applied to dexterous robotic hands, the high complexity of the systems makes learning complex manipulation tasks challenging. However, the numerous datasets depicting human hands in various different tasks could provide us with better knowledge regarding human hand motion. We propose a method to leverage multiple large-scale task-agnostic datasets to obtain latent representations that effectively encode motion subtrajectories that we included in a transformer-based behavior cloning method. Our results demonstrate that employing latent representations yields enhanced performance compared to conventional behavior cloning methods, particularly regarding resilience to errors and noise in perception and proprioception. Furthermore, the proposed approach solely relies on human demonstrations, eliminating the need for teleoperation and, therefore, accelerating the data acquisition process. Accurate inverse kinematics for fingertip retargeting ensures precise transfer from human hand data to the robot, facilitating effective learning and deployment of manipulation policies. Finally, the trained policies have been successfully transferred to a real-world 23Dof robotic system.