 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign Method of a Kangaroo Robot with High Power Legs and an Articulated Soft Tail
Oct 10, 2024In this paper, we focus on the kangaroo, which has powerful legs capable of jumping and a soft and strong tail. To incorporate these unique structure into a robot for utilization, we propose a design method that takes into account both the feasibility as a robot and the kangaroo-mimetic structure. Based on the kangaroo's musculoskeletal structure, we determine the structure of the robot that enables it to jump by analyzing the muscle arrangement and prior verification in simulation. Also, to realize a tail capable of body support, we use an articulated, elastic structure as a tail. In order to achieve both softness and high power output, the robot is driven by a direct-drive, high-power wire-winding mechanism, and weight of legs and the tail is reduced by placing motors in the torso. The developed kangaroo robot can jump with its hind legs, moving its tail, and supporting its body using its hind legs and tail.
Hardware Design and Learning-Based Software Architecture of Musculoskeletal Wheeled Robot Musashi-W for Real-World Applications
Mar 18, 2024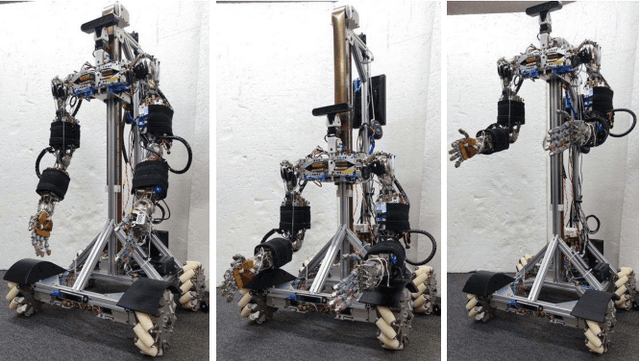
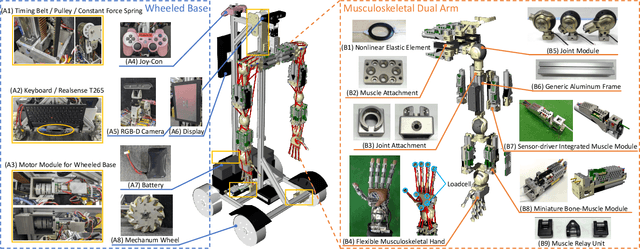
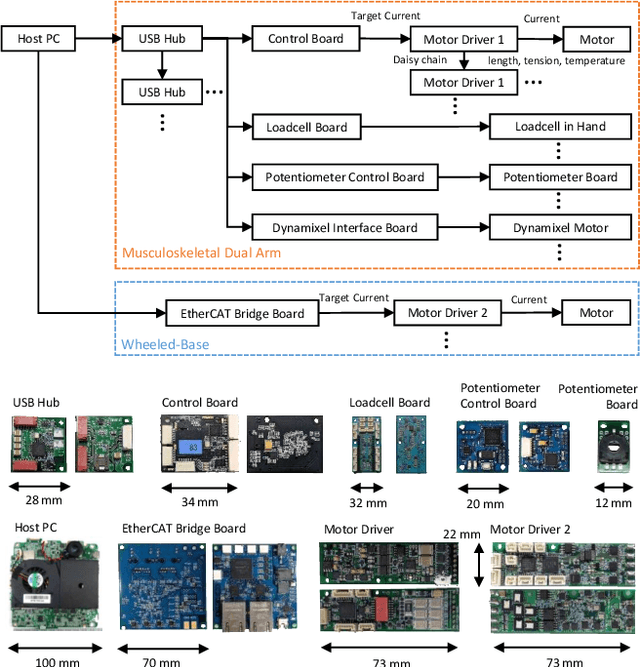
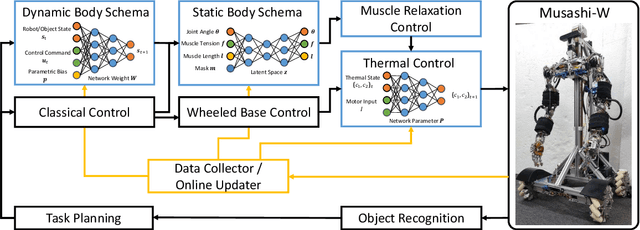
Various musculoskeletal humanoids have been developed so far. While these humanoids have the advantage of their flexible and redundant bodies that mimic the human body, they are still far from being applied to real-world tasks. One of the reasons for this is the difficulty of bipedal walking in a flexible body. Thus, we developed a musculoskeletal wheeled robot, Musashi-W, by combining a wheeled base and musculoskeletal upper limbs for real-world applications. Also, we constructed its software system by combining static and dynamic body schema learning, reflex control, and visual recognition. We show that the hardware and software of Musashi-W can make the most of the advantages of the musculoskeletal upper limbs, through several tasks of cleaning by human teaching, carrying a heavy object considering muscle addition, and setting a table through dynamic cloth manipulation with variable stiffness.
SAQIEL: Ultra-Light and Safe Manipulator with Passive 3D Wire Alignment Mechanism
Mar 04, 2024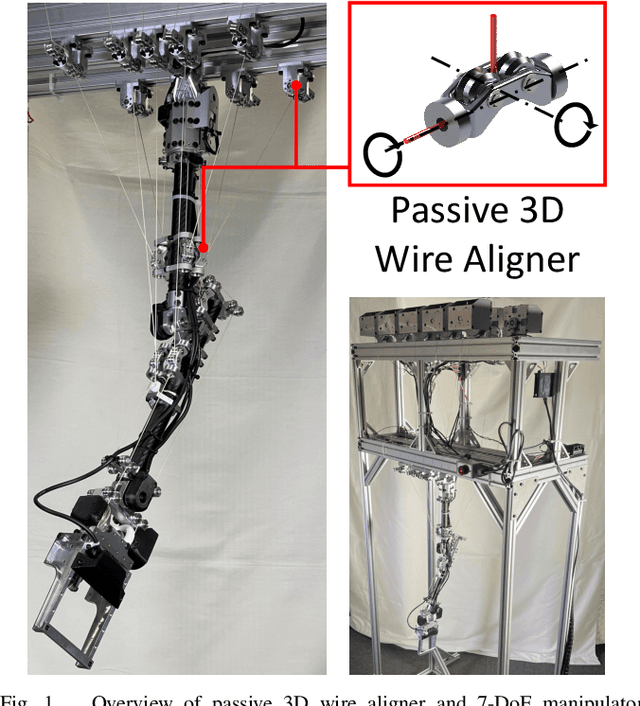
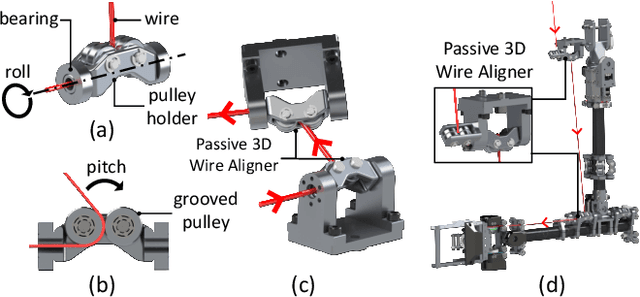
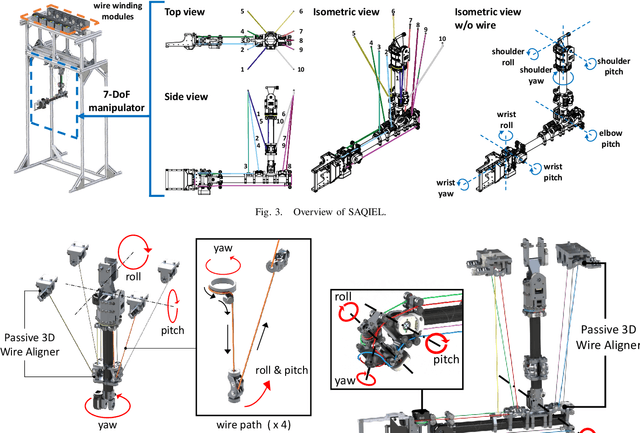
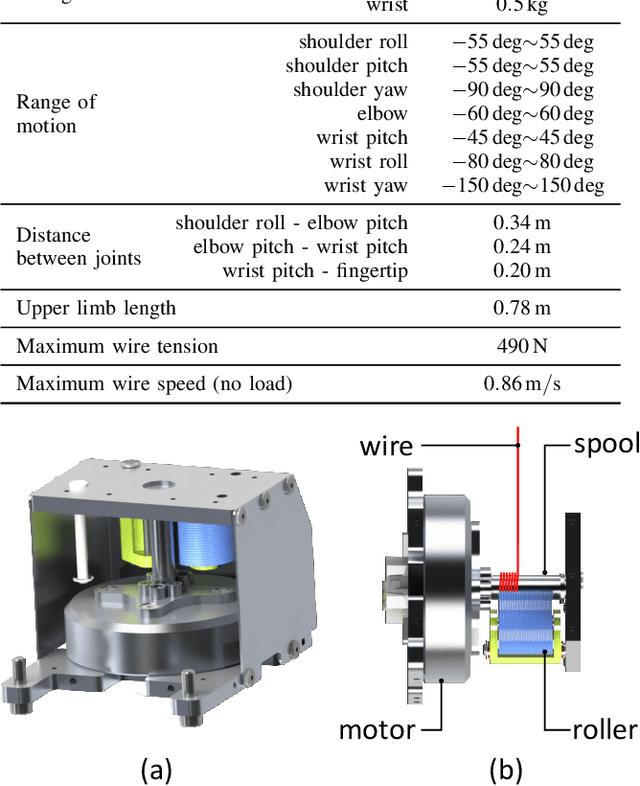
Improving the safety of collaborative manipulators necessitates the reduction of inertia in the moving part. Within this paper, we introduce a novel approach in the form of a passive 3D wire aligner, serving as a lightweight and low-friction power transmission mechanism, thus achieving the desired low inertia in the manipulator's operation. Through the utilization of this innovation, the consolidation of hefty actuators onto the root link becomes feasible, consequently enabling a supple drive characterized by minimal friction. To demonstrate the efficacy of this device, we fabricate an ultralight 7 degrees of freedom (DoF) manipulator named SAQIEL, boasting a mere 1.5 kg weight for its moving components. Notably, to mitigate friction within SAQIEL's actuation system, we employ a distinctive mechanism that directly winds wires using motors, obviating the need for traditional gear or belt-based speed reduction mechanisms. Through a series of empirical trials, we substantiate that SAQIEL adeptly strikes balance between lightweight design, substantial payload capacity, elevated velocity, precision, and adaptability.
* accepted at IEEE Robotics and Automation Letters (RA-L), website -https://tenrobo18.github.io/saqiel-ral2023-webpage/
RAMIEL: A Parallel-Wire Driven Monopedal Robot for High and Continuous Jumping
Nov 08, 2023



Legged robots with high locomotive performance have been extensively studied, and various leg structures have been proposed. Especially, a leg structure that can achieve both continuous and high jumps is advantageous for moving around in a three-dimensional environment. In this study, we propose a parallel wire-driven leg structure, which has one DoF of linear motion and two DoFs of rotation and is controlled by six wires, as a structure that can achieve both continuous jumping and high jumping. The proposed structure can simultaneously achieve high controllability on each DoF, long acceleration distance and high power required for jumping. In order to verify the jumping performance of the parallel wire-driven leg structure, we have developed a parallel wire-driven monopedal robot, RAMIEL. RAMIEL is equipped with quasi-direct drive, high power wire winding mechanisms and a lightweight leg, and can achieve a maximum jumping height of 1.6 m and a maximum of seven continuous jumps.