 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComponent Modularized Design of Musculoskeletal Humanoid Platform Musashi to Investigate Learning Control Systems
Oct 29, 2024To develop Musashi as a musculoskeletal humanoid platform to investigate learning control systems, we aimed for a body with flexible musculoskeletal structure, redundant sensors, and easily reconfigurable structure. For this purpose, we develop joint modules that can directly measure joint angles, muscle modules that can realize various muscle routes, and nonlinear elastic units with soft structures, etc. Next, we develop MusashiLarm, a musculoskeletal platform composed of only joint modules, muscle modules, generic bone frames, muscle wire units, and a few attachments. Finally, we develop Musashi, a musculoskeletal humanoid platform which extends MusashiLarm to the whole body design, and conduct several basic experiments and learning control experiments to verify the effectiveness of its concept.
Human-mimetic binaural ear design and sound source direction estimation for task realization of musculoskeletal humanoids
Sep 10, 2024Human-like environment recognition by musculoskeletal humanoids is important for task realization in real complex environments and for use as dummies for test subjects. Humans integrate various sensory information to perceive their surroundings, and hearing is particularly useful for recognizing objects out of view or out of touch. In this research, we aim to realize human-like auditory environmental recognition and task realization for musculoskeletal humanoids by equipping them with a human-like auditory processing system. Humans realize sound-based environmental recognition by estimating directions of the sound sources and detecting environmental sounds based on changes in the time and frequency domain of incoming sounds and the integration of auditory information in the central nervous system. We propose a human mimetic auditory information processing system, which consists of three components: the human mimetic binaural ear unit, which mimics human ear structure and characteristics, the sound source direction estimation system, and the environmental sound detection system, which mimics processing in the central nervous system. We apply it to Musashi, a human mimetic musculoskeletal humanoid, and have it perform tasks that require sound information outside of view in real noisy environments to confirm the usefulness of the proposed methods.
Toward Autonomous Driving by Musculoskeletal Humanoids: A Study of Developed Hardware and Learning-Based Software
Jun 08, 2024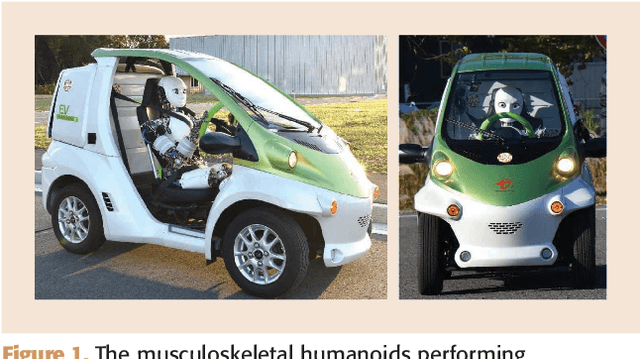
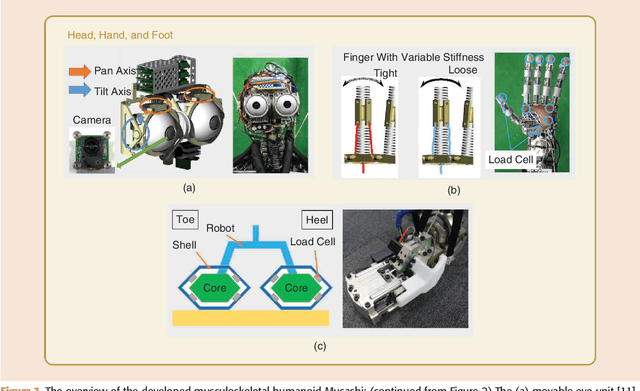

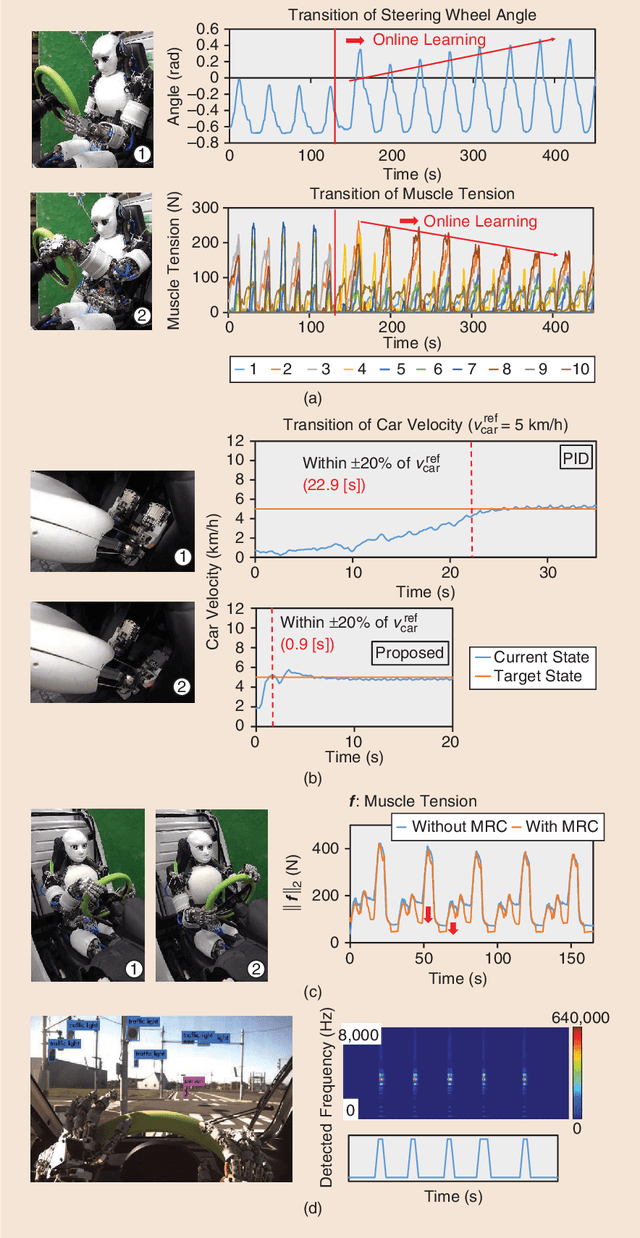
This paper summarizes an autonomous driving project by musculoskeletal humanoids. The musculoskeletal humanoid, which mimics the human body in detail, has redundant sensors and a flexible body structure. These characteristics are suitable for motions with complex environmental contact, and the robot is expected to sit down on the car seat, step on the acceleration and brake pedals, and operate the steering wheel by both arms. We reconsider the developed hardware and software of the musculoskeletal humanoid Musashi in the context of autonomous driving. The respective components of autonomous driving are conducted using the benefits of the hardware and software. Finally, Musashi succeeded in the pedal and steering wheel operations with recognition.
TWIMP: Two-Wheel Inverted Musculoskeletal Pendulum as a Learning Control Platform in the Real World with Environmental Physical Contact
Apr 22, 2024



By the recent spread of machine learning in the robotics field, a humanoid that can act, perceive, and learn in the real world through contact with the environment needs to be developed. In this study, as one of the choices, we propose a novel humanoid TWIMP, which combines a human mimetic musculoskeletal upper limb with a two-wheel inverted pendulum. By combining the benefit of a musculoskeletal humanoid, which can achieve soft contact with the external environment, and the benefit of a two-wheel inverted pendulum with a small footprint and high mobility, we can easily investigate learning control systems in environments with contact and sudden impact. We reveal our whole concept and system details of TWIMP, and execute several preliminary experiments to show its potential ability.
Hardware Design and Learning-Based Software Architecture of Musculoskeletal Wheeled Robot Musashi-W for Real-World Applications
Mar 18, 2024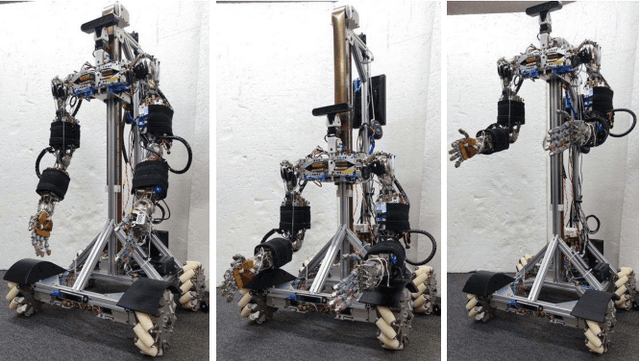
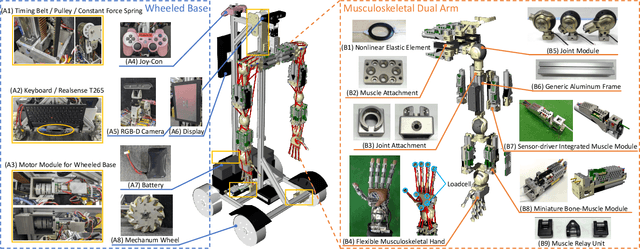
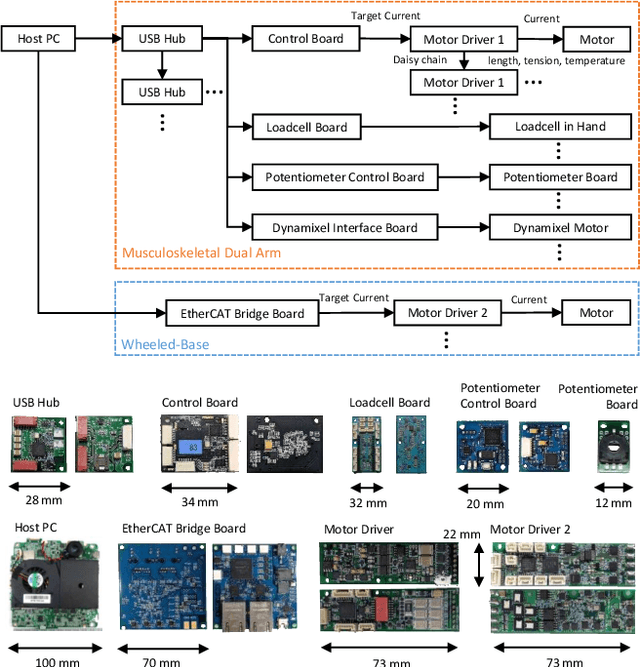
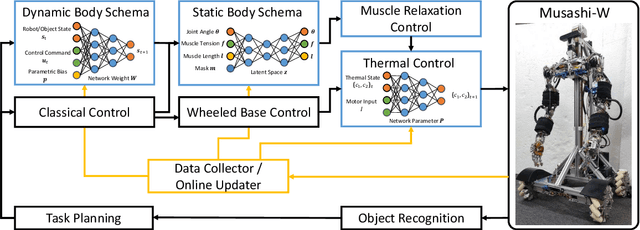
Various musculoskeletal humanoids have been developed so far. While these humanoids have the advantage of their flexible and redundant bodies that mimic the human body, they are still far from being applied to real-world tasks. One of the reasons for this is the difficulty of bipedal walking in a flexible body. Thus, we developed a musculoskeletal wheeled robot, Musashi-W, by combining a wheeled base and musculoskeletal upper limbs for real-world applications. Also, we constructed its software system by combining static and dynamic body schema learning, reflex control, and visual recognition. We show that the hardware and software of Musashi-W can make the most of the advantages of the musculoskeletal upper limbs, through several tasks of cleaning by human teaching, carrying a heavy object considering muscle addition, and setting a table through dynamic cloth manipulation with variable stiffness.
RAMIEL: A Parallel-Wire Driven Monopedal Robot for High and Continuous Jumping
Nov 08, 2023



Legged robots with high locomotive performance have been extensively studied, and various leg structures have been proposed. Especially, a leg structure that can achieve both continuous and high jumps is advantageous for moving around in a three-dimensional environment. In this study, we propose a parallel wire-driven leg structure, which has one DoF of linear motion and two DoFs of rotation and is controlled by six wires, as a structure that can achieve both continuous jumping and high jumping. The proposed structure can simultaneously achieve high controllability on each DoF, long acceleration distance and high power required for jumping. In order to verify the jumping performance of the parallel wire-driven leg structure, we have developed a parallel wire-driven monopedal robot, RAMIEL. RAMIEL is equipped with quasi-direct drive, high power wire winding mechanisms and a lightweight leg, and can achieve a maximum jumping height of 1.6 m and a maximum of seven continuous jumps.