 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStability Recognition with Active Vibration for Bracing Behaviors and Motion Extensions Using Environment in Musculoskeletal Humanoids
Feb 22, 2025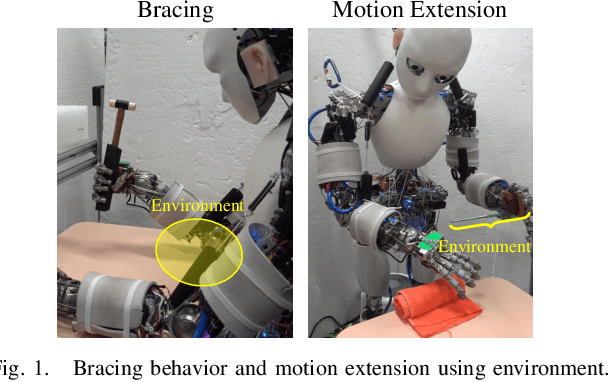
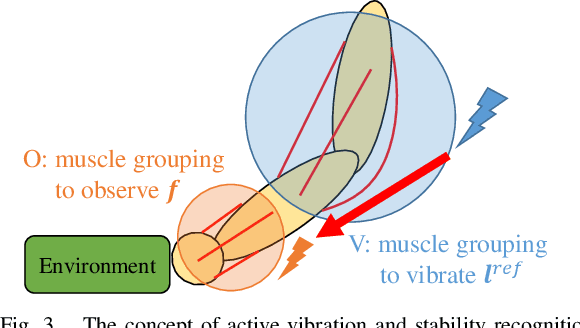
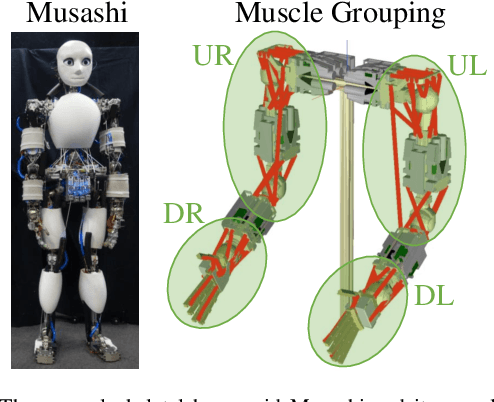
Although robots with flexible bodies are superior in terms of the contact and adaptability, it is difficult to control them precisely. On the other hand, human beings make use of the surrounding environments to stabilize their bodies and control their movements. In this study, we propose a method for the bracing motion and extension of the range of motion using the environment for the musculoskeletal humanoid. Here, it is necessary to recognize the stability of the body when contacting the environment, and we develop a method to measure it by using the change in sensor values of the body when actively vibrating a part of the body. Experiments are conducted using the musculoskeletal humanoid Musashi, and the effectiveness of this method is confirmed.
Online Learning of Danger Avoidance for Complex Structures of Musculoskeletal Humanoids and Its Applications
Feb 22, 2025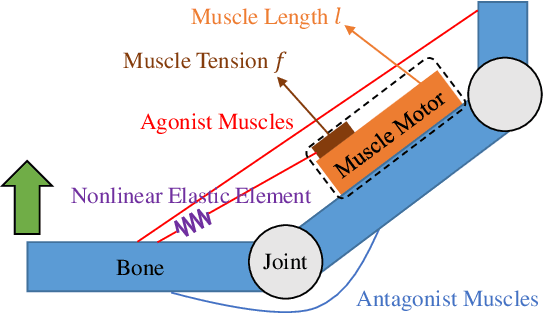
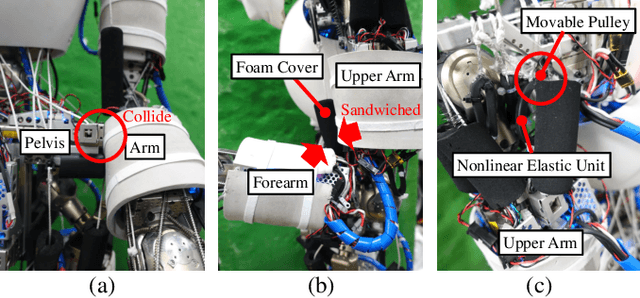
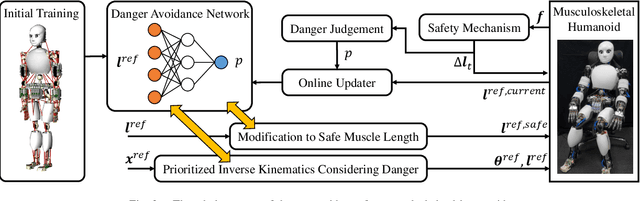
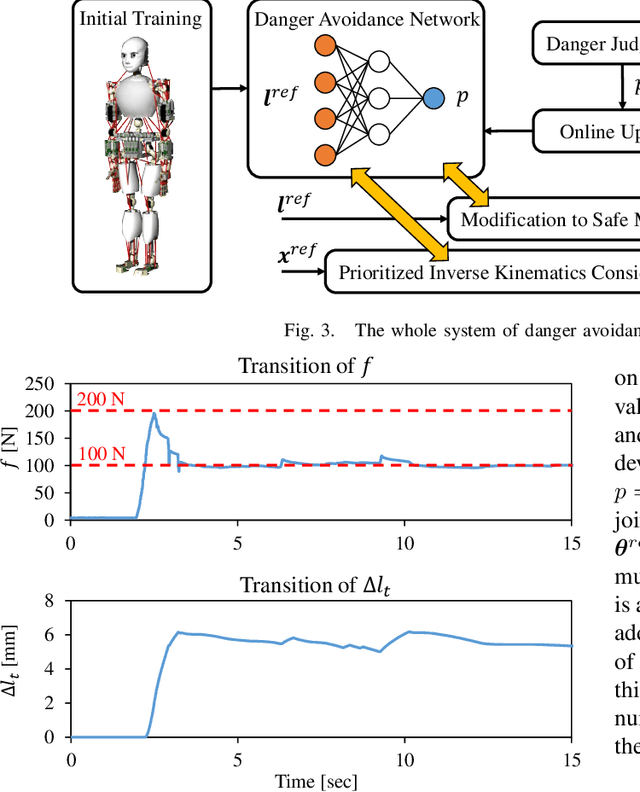
The complex structure of musculoskeletal humanoids makes it difficult to model them, and the inter-body interference and high internal muscle force are unavoidable. Although various safety mechanisms have been developed to solve this problem, it is important not only to deal with the dangers when they occur but also to prevent them from happening. In this study, we propose a method to learn a network outputting danger probability corresponding to the muscle length online so that the robot can gradually prevent dangers from occurring. Applications of this network for control are also described. The method is applied to the musculoskeletal humanoid, Musashi, and its effectiveness is verified.
Reflex-based Motion Strategy of Musculoskeletal Humanoids under Environmental Contact Using Muscle Relaxation Control
Feb 22, 2025



The musculoskeletal humanoid can move well under environmental contact thanks to its body softness. However, there are few studies that actively make use of the environment to rest its flexible musculoskeletal body. Also, its complex musculoskeletal structure is difficult to modelize and high internal muscle tension sometimes occurs. To solve these problems, we develop a muscle relaxation control which can minimize the muscle tension by actively using the environment and inhibit useless internal muscle tension. We apply this control to some basic movements, the motion of resting the arms on the desk, and handle operation, and verify its effectiveness.
Applications of Stretch Reflex for the Upper Limb of Musculoskeletal Humanoids: Protective Behavior, Postural Stability, and Active Induction
Feb 18, 2025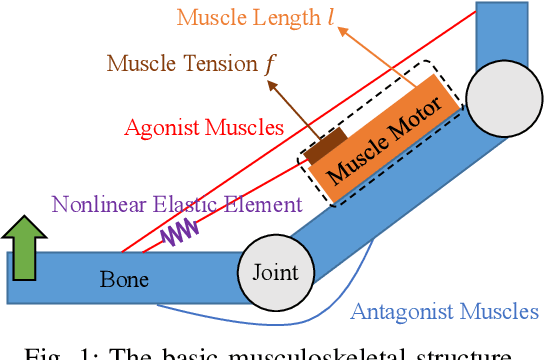
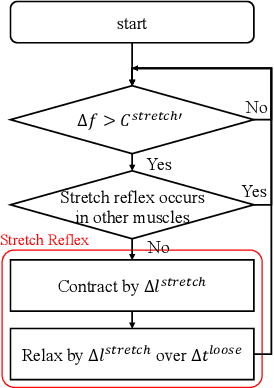
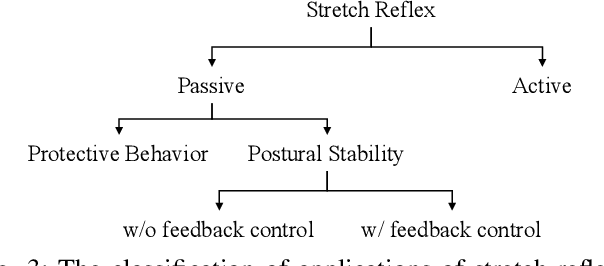
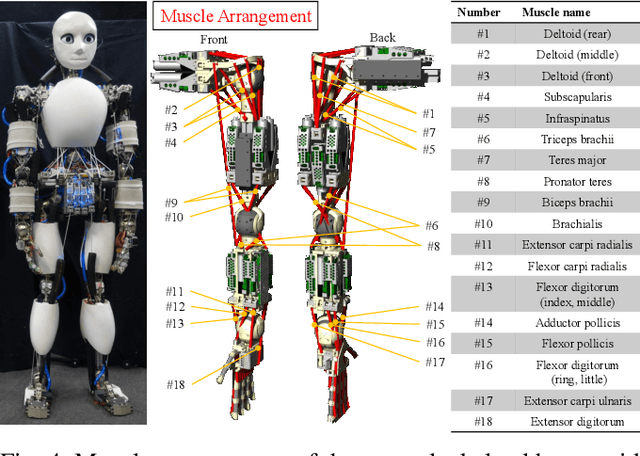
The musculoskeletal humanoid has various biomimetic benefits, and it is important that we can embed and evaluate human reflexes in the actual robot. Although stretch reflex has been implemented in lower limbs of musculoskeletal humanoids, we apply it to the upper limb to discover its useful applications. We consider the implementation of stretch reflex in the actual robot, its active/passive applications, and the change in behavior according to the difference of parameters.
Exceeding the Maximum Speed Limit of the Joint Angle for the Redundant Tendon-driven Structures of Musculoskeletal Humanoids
Feb 18, 2025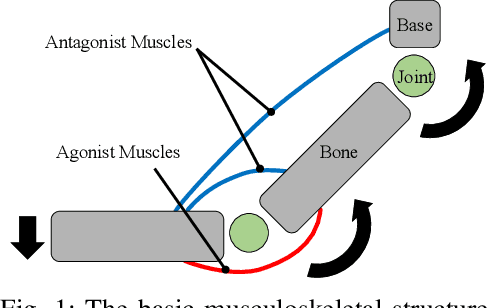
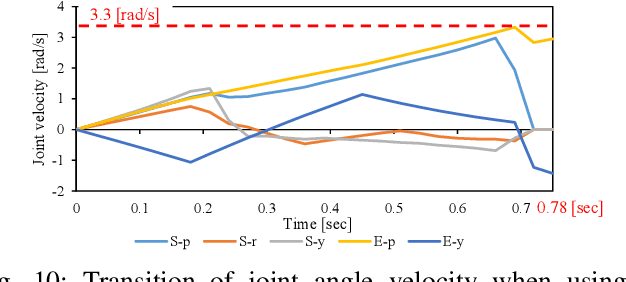
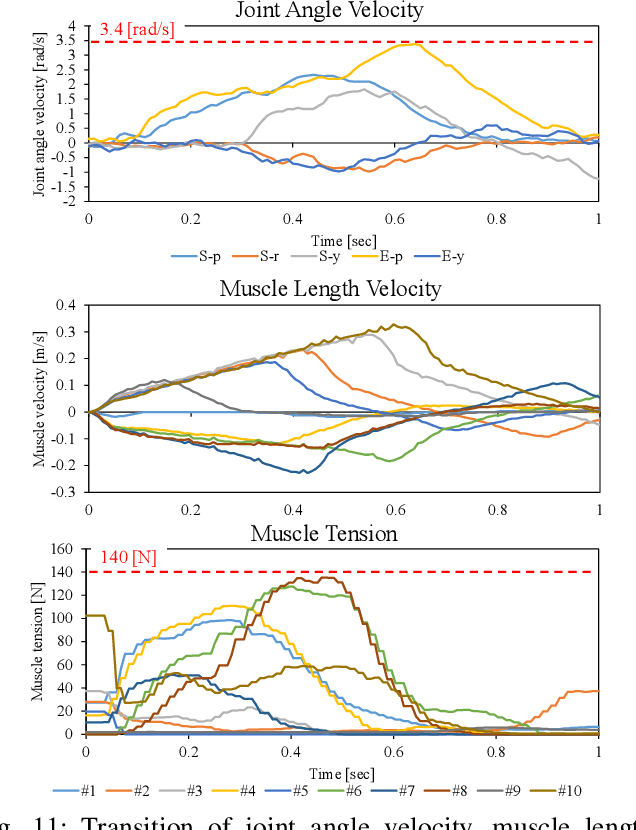
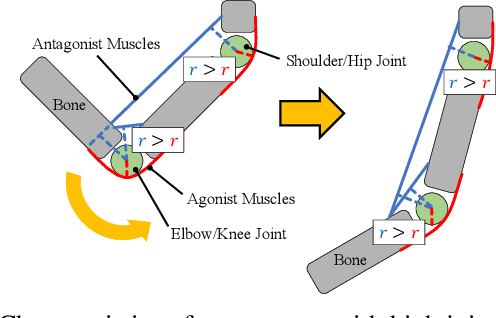
The musculoskeletal humanoid has various biomimetic benefits, and the redundant muscle arrangement is one of its most important characteristics. This redundancy can achieve fail-safe redundant actuation and variable stiffness control. However, there is a problem that the maximum joint angle velocity is limited by the slowest muscle among the redundant muscles. In this study, we propose two methods that can exceed the limited maximum joint angle velocity, and verify the effectiveness with actual robot experiments.
Design Optimization of Musculoskeletal Humanoids with Maximization of Redundancy to Compensate for Muscle Rupture
Feb 18, 2025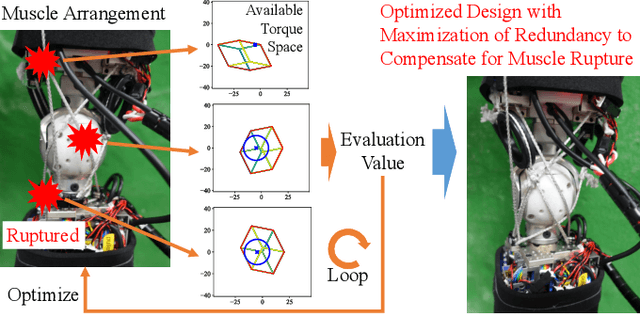

Musculoskeletal humanoids have various biomimetic advantages, and the redundant muscle arrangement allowing for variable stiffness control is one of the most important. In this study, we focus on one feature of the redundancy, which enables the humanoid to keep moving even if one of its muscles breaks, an advantage that has not been dealt with in many studies. In order to make the most of this advantage, the design of muscle arrangement is optimized by considering the maximization of minimum available torque that can be exerted when one muscle breaks. This method is applied to the elbow of a musculoskeletal humanoid Musashi with simulations, the design policy is extracted from the optimization results, and its effectiveness is confirmed with the actual robot.
Task-specific Self-body Controller Acquisition by Musculoskeletal Humanoids: Application to Pedal Control in Autonomous Driving
Dec 11, 2024
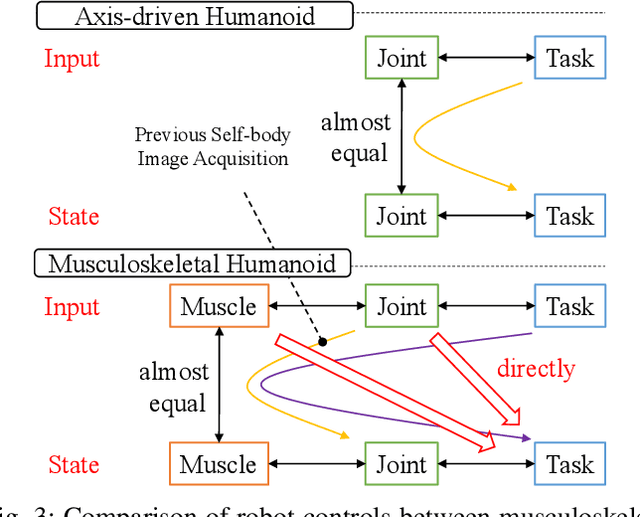
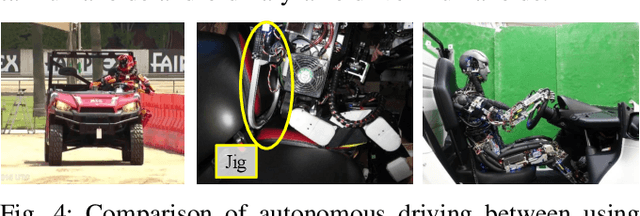
The musculoskeletal humanoid has many benefits that human beings have, but the modeling of its complex flexible body is difficult. Although we have developed an online acquisition method of the nonlinear relationship between joints and muscles, we could not completely match the actual robot and its self-body image. When realizing a certain task, the direct relationship between the control input and task state needs to be learned. So, we construct a neural network representing the time-series relationship between the control input and task state, and realize the intended task state by applying the network to a real-time control. In this research, we conduct accelerator pedal control experiments as one application, and verify the effectiveness of this study.
Modification of muscle antagonistic relations and hand trajectory on the dynamic motion of Musculoskeletal Humanoid
Dec 01, 2024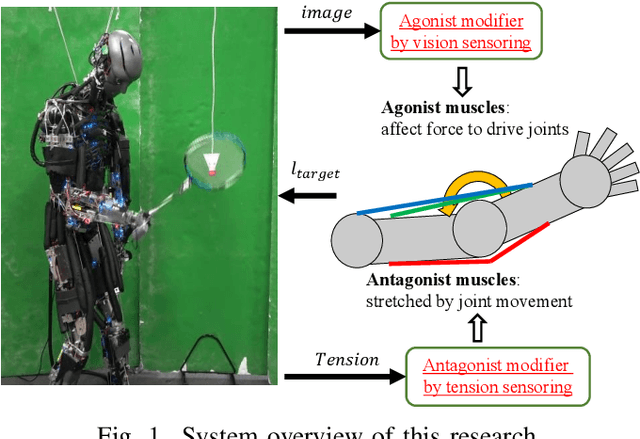
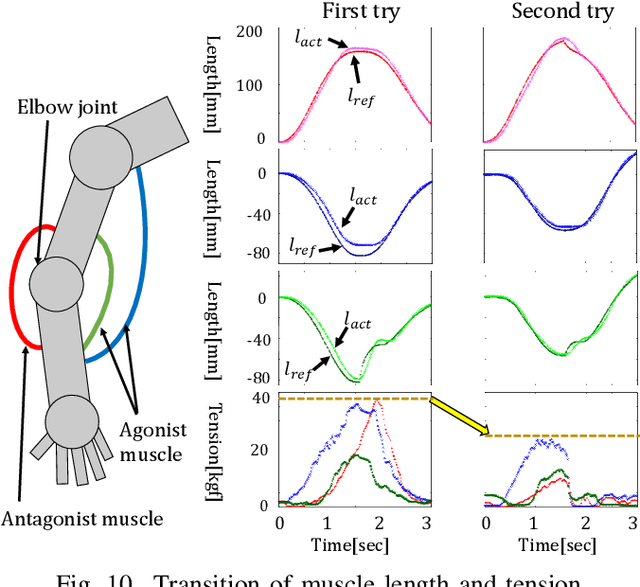
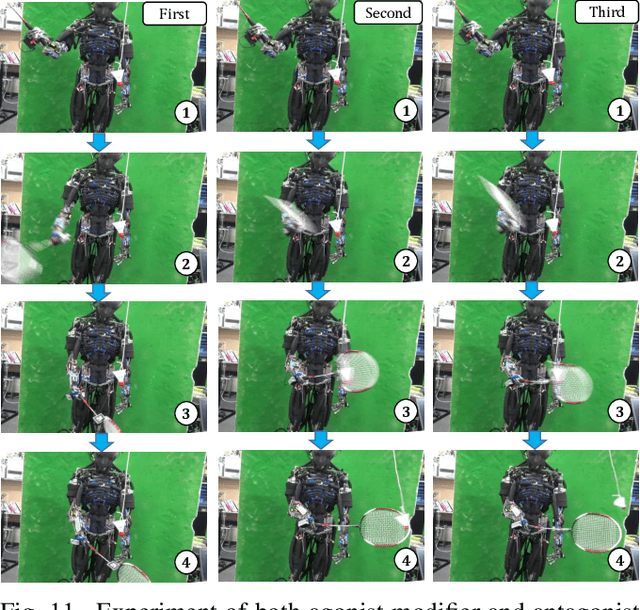
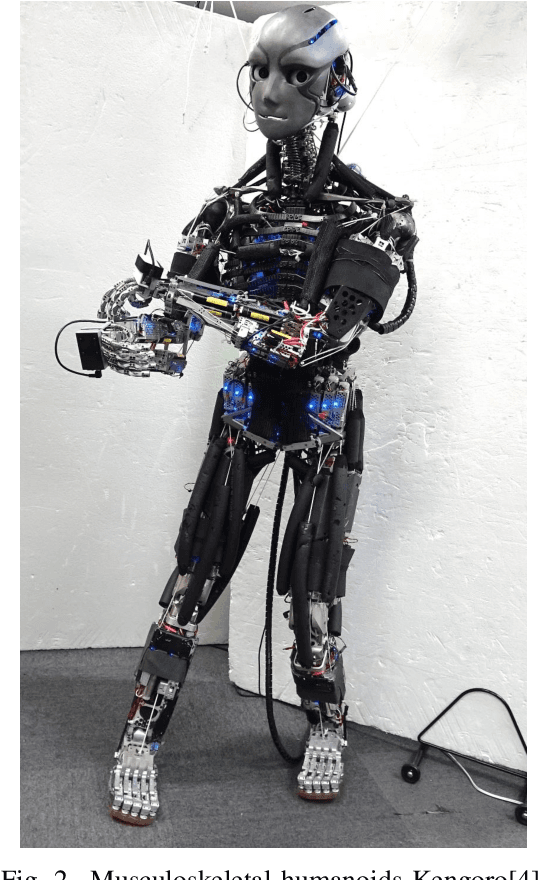
In recent years, some research on musculoskeletal humanoids is in progress. However, there are some challenges such as unmeasurable transformation of body structure and muscle path, and difficulty in measuring own motion because of lack of joint angle sensor. In this study, we suggest two motion acquisition methods. One is a method to acquire antagonistic relations of muscles by tension sensing, and the other is a method to acquire correct hand trajectory by vision sensing. Finally, we realize badminton shuttlecock-hitting motion of Kengoro with these two acquisition methods.
Motion Modification Method of Musculoskeletal Humanoids by Human Teaching Using Muscle-Based Compensation Control
Nov 10, 2024



While musculoskeletal humanoids have the advantages of various biomimetic structures, it is difficult to accurately control the body, which is challenging to model. Although various learning-based control methods have been developed so far, they cannot completely absorb model errors, and recognition errors are also bound to occur. In this paper, we describe a method to modify the movement of the musculoskeletal humanoid by applying external force during the movement, taking advantage of its flexible body. Considering the fact that the joint angles cannot be measured, and that the external force greatly affects the nonlinear elastic element and not the actuator, the modified motion is reproduced by the proposed muscle-based compensation control. This method is applied to a musculoskeletal humanoid, Musashi, and its effectiveness is confirmed.
Self-Body Image Acquisition and Posture Generation with Redundancy using Musculoskeletal Humanoid Shoulder Complex for Object Manipulation
Nov 10, 2024



We proposed a method for learning the actual body image of a musculoskeletal humanoid for posture generation and object manipulation using inverse kinematics with redundancy in the shoulder complex. The effectiveness of this method was confirmed by realizing automobile steering wheel operation. The shoulder complex has a scapula that glides over the rib cage and an open spherical joint, and is supported by numerous muscle groups, enabling a wide range of motion. As a development of the human mimetic shoulder complex, we have increased the muscle redundancy by implementing deep muscles and stabilize the joint drive. As a posture generation method to utilize the joint redundancy of the shoulder complex, we consider inverse kinematics based on the scapular drive strategy suggested by the scapulohumeral rhythm of the human body. In order to control a complex robot imitating a human body, it is essential to learn its own body image, but it is difficult to know its own state accurately due to its deformation which is difficult to measure. To solve this problem, we developed a method to acquire a self-body image that can be updated appropriately by recognizing the hand position relative to an object for the purpose of object manipulation. We apply the above methods to a full-body musculoskeletal humanoid, Kengoro, and confirm its effectiveness by conducting an experiment to operate a car steering wheel, which requires the appropriate use of both arms.