Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModification of muscle antagonistic relations and hand trajectory on the dynamic motion of Musculoskeletal Humanoid
Paper and Code
Dec 01, 2024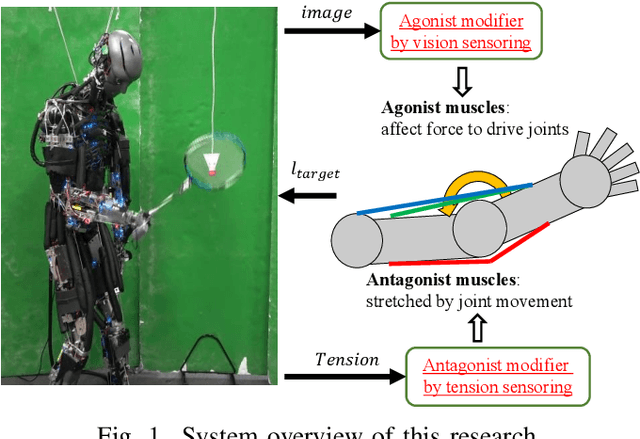
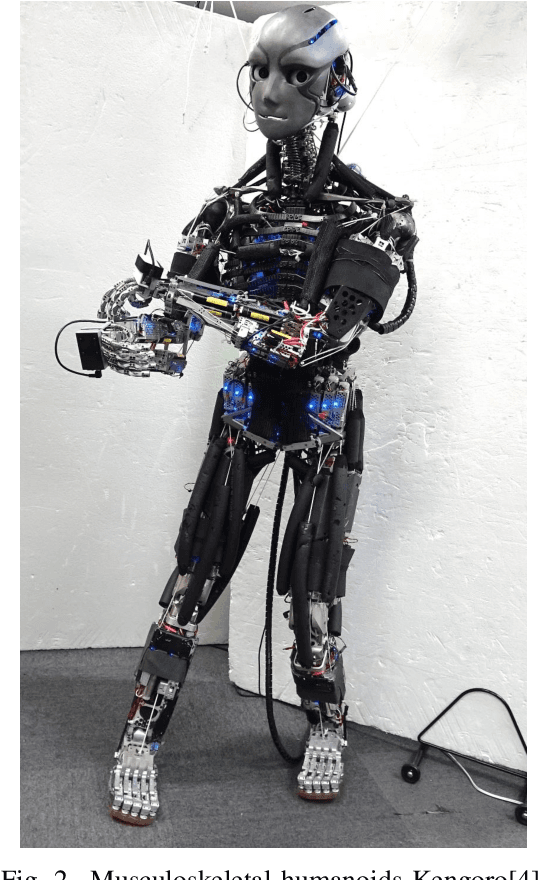
In recent years, some research on musculoskeletal humanoids is in progress. However, there are some challenges such as unmeasurable transformation of body structure and muscle path, and difficulty in measuring own motion because of lack of joint angle sensor. In this study, we suggest two motion acquisition methods. One is a method to acquire antagonistic relations of muscles by tension sensing, and the other is a method to acquire correct hand trajectory by vision sensing. Finally, we realize badminton shuttlecock-hitting motion of Kengoro with these two acquisition methods.
* Accepted at Humanoids2019
View paper on