 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploring the proprioceptive potential of joint receptors using a biomimetic robotic joint
Apr 08, 2026In neuroscience, joint receptors have traditionally been viewed as limit detectors, providing positional information only at extreme joint angles, while muscle spindles are considered the primary sensors of joint angle position. However, joint receptors are widely distributed throughout the joint capsule, and their full role in proprioception remains unclear. In this study, we specifically focused on mimicking Type I joint receptors, which respond to slow and sustained movements, and quantified their proprioceptive potential using a biomimetic joint developed with robotics technology. Results showed that Type I-like joint receptors alone enabled proprioceptive sensing with an average error of less than 2 degrees in both bending and twisting motions. These findings suggest that joint receptors may play a greater role in proprioception than previously recognized and that the relative contributions of muscle spindles and joint receptors are differentially weighted within neural networks during development and evolution. Furthermore, this work may prompt new discussions on the differential proprioceptive deficits observed between the elbows and knees in patients with hereditary sensory and autonomic neuropathy type III. Together, these findings highlight the potential of biomimetics-based robotic approaches for advancing interdisciplinary research bridging neuroscience, medicine, and robotics.
* 26 pages including supplementary materials (17 pages main text), 6 main figures and 7 supplementary figures. Published in Scientific Reports
Vlimb: A Wire-Driven Wearable Robot for Bodily Extension, Balancing Powerfulness and Reachability
Nov 14, 2024Numerous wearable robots have been developed to meet the demands of physical assistance and entertainment. These wearable robots range from body-enhancing types that assist human arms and legs to body-extending types that have extra arms. This study focuses specifically on wearable robots of the latter category, aimed at bodily extension. However, they have not yet achieved the level of powerfulness and reachability equivalent to that of human limbs, limiting their application to entertainment and manipulation tasks involving lightweight objects. Therefore, in this study, we develop an body-extending wearable robot, Vlimb, which has enough powerfulness to lift a human and can perform manipulation. Leveraging the advantages of tendon-driven mechanisms, Vlimb incorporates a wire routing mechanism capable of accommodating both delicate manipulations and robust lifting tasks. Moreover, by introducing a passive ring structure to overcome the limited reachability inherent in tendon-driven mechanisms, Vlimb achieves both the powerfulness and reachability comparable to that of humans. This paper outlines the design methodology of Vlimb, conducts preliminary manipulation and lifting tasks, and verifies its effectiveness.
Adaptive Body Schema Learning System Considering Additional Muscles for Musculoskeletal Humanoids
Nov 10, 2024



One of the important advantages of musculoskeletal humanoids is that the muscle arrangement can be easily changed and the number of muscles can be increased according to the situation. In this study, we describe an overall system of muscle addition for musculoskeletal humanoids and the adaptive body schema learning while taking into account the additional muscles. For hardware, we describe a modular body design that can be fitted with additional muscles, and for software, we describe a method that can learn the changes in body schema associated with additional muscles from a small amount of motion data. We apply our method to a simple 1-DOF tendon-driven robot simulation and the arm of the musculoskeletal humanoid Musashi, and show the effectiveness of muscle tension relaxation by adding muscles for a high-load task.
Fundamental Three-Dimensional Configuration of Wire-Wound Muscle-Tendon Complex Drive
Nov 06, 2024For robots to become more versatile and expand their areas of application, their bodies need to be suitable for contact with the environment. When the human body comes into contact with the environment, it is possible for it to continue to move even if the positional relationship between muscles or the shape of the muscles changes. We have already focused on the effect of geometric deformation of muscles and proposed a drive system called wire-wound Muscle-Tendon Complex (ww-MTC), an extension of the wire drive system. Our previous study using a robot with a two-dimensional configuration demonstrated several advantages: reduced wire loosening, interference, and wear; improved robustness during environmental contact; and a muscular appearance. However, this design had some problems, such as excessive muscle expansion that hindered inter-muscle movement, and confinement to planar motion. In this study, we develop the ww-MTC into a three-dimensional shape. We present a fundamental construction method for a muscle exterior that expands gently and can be contacted over its entire surface. We also apply the three-dimensional ww-MTC to a 2-axis 3-muscle robot, and confirm that the robot can continue to move while adapting to its environment.
Patterned Structure Muscle : Arbitrary Shaped Wire-driven Artificial Muscle Utilizing Anisotropic Flexible Structure for Musculoskeletal Robots
Oct 10, 2024Muscles of the human body are composed of tiny actuators made up of myosin and actin filaments. They can exert force in various shapes such as curved or flat, under contact forces and deformations from the environment. On the other hand, muscles in musculoskeletal robots so far have faced challenges in generating force in such shapes and environments. To address this issue, we propose Patterned Structure Muscle (PSM), artificial muscles for musculoskeletal robots. PSM utilizes patterned structures with anisotropic characteristics, wire-driven mechanisms, and is made of flexible material Thermoplastic Polyurethane (TPU) using FDM 3D printing. This method enables the creation of various shapes of muscles, such as simple 1 degree-of-freedom (DOF) muscles, Multi-DOF wide area muscles, joint-covering muscles, and branched muscles. We created an upper arm structure using these muscles to demonstrate wide range of motion, lifting heavy objects, and movements through environmental contact. These experiments show that the proposed PSM is capable of operating in various shapes and environments, and is suitable for the muscles of musculoskeletal robots.
Construction of Musculoskeletal Simulation for Shoulder Complex with Ligaments and Its Validation via Model Predictive Control
Oct 08, 2024The complex ways in which humans utilize their bodies in sports and martial arts are remarkable, and human motion analysis is one of the most effective tools for robot body design and control. On the other hand, motion analysis is not easy, and it is difficult to measure complex body motions in detail due to the influence of numerous muscles and soft tissues, mainly ligaments. In response, various musculoskeletal simulators have been developed and applied to motion analysis and robotics. However, none of them reproduce the ligaments but only the muscles, nor do they focus on the shoulder complex, including the clavicle and scapula, which is one of the most complex parts of the body. Therefore, in this study, a detailed simulation model of the shoulder complex including ligaments is constructed. The model will mimic not only the skeletal structure and muscle arrangement but also the ligament arrangement and maximum muscle strength. Through model predictive control based on the constructed simulation, we confirmed that the ligaments contribute to joint stabilization in the first movement and that the proper distribution of maximum muscle force contributes to the equalization of the load on each muscle, demonstrating the effectiveness of this simulation.
Learning of Balance Controller Considering Changes in Body State for Musculoskeletal Humanoids
May 20, 2024The musculoskeletal humanoid is difficult to modelize due to the flexibility and redundancy of its body, whose state can change over time, and so balance control of its legs is challenging. There are some cases where ordinary PID controls may cause instability. In this study, to solve these problems, we propose a method of learning a correlation model among the joint angle, muscle tension, and muscle length of the ankle and the zero moment point to perform balance control. In addition, information on the changing body state is embedded in the model using parametric bias, and the model estimates and adapts to the current body state by learning this information online. This makes it possible to adapt to changes in upper body posture that are not directly taken into account in the model, since it is difficult to learn the complete dynamics of the whole body considering the amount of data and computation. The model can also adapt to changes in body state, such as the change in footwear and change in the joint origin due to recalibration. The effectiveness of this method is verified by a simulation and by using an actual musculoskeletal humanoid, Musashi.
Designing Fluid-Exuding Cartilage for Biomimetic Robots Mimicking Human Joint Lubrication Function
Apr 10, 2024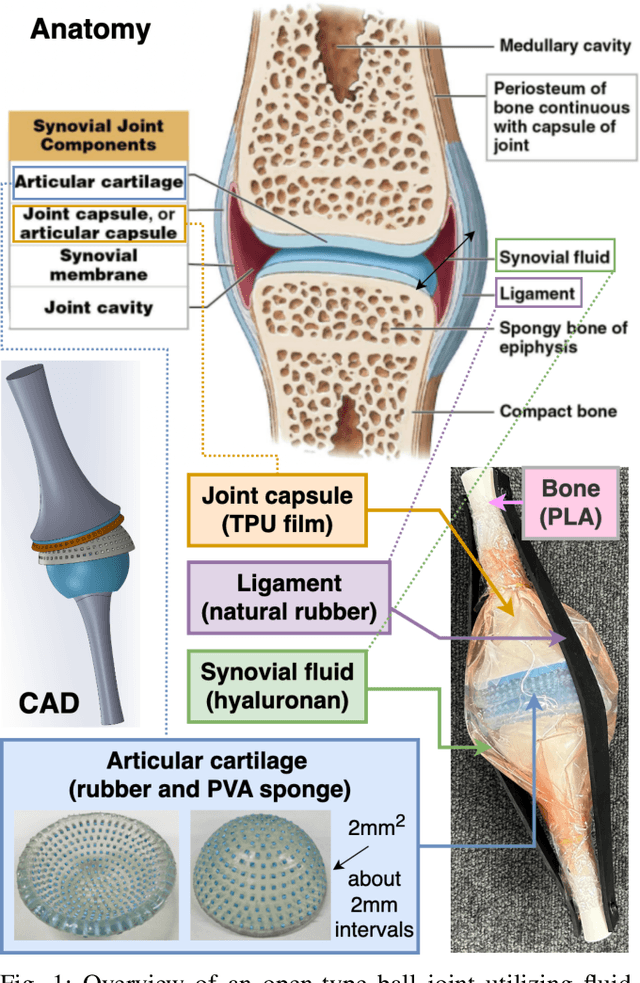
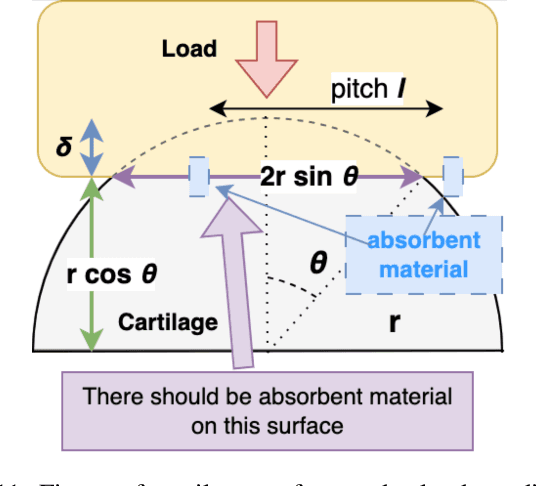
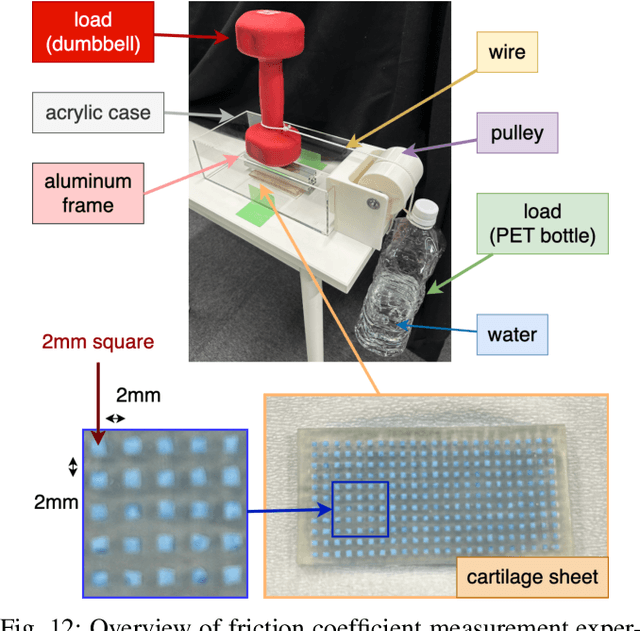
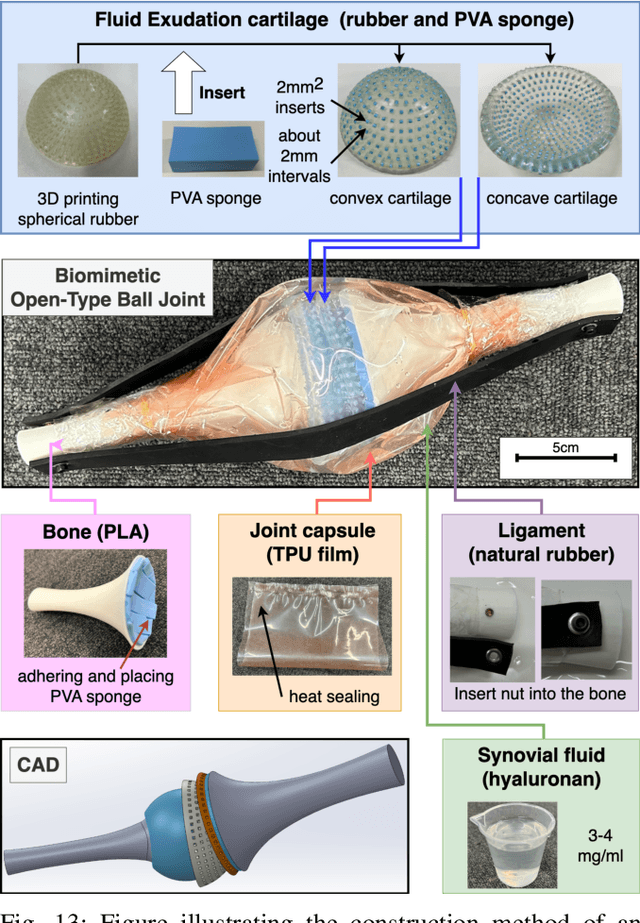
The human joint is an open-type joint composed of bones, cartilage, ligaments, synovial fluid, and joint capsule, having advantages of flexibility and impact resistance. However, replicating this structure in robots introduces friction challenges due to the absence of bearings. To address this, our study focuses on mimicking the fluid-exuding function of human cartilage. We employ a rubber-based 3D printing technique combined with absorbent materials to create a versatile and easily designed cartilage sheet for biomimetic robots. We evaluate both the fluid-exuding function and friction coefficient of the fabricated flat cartilage sheet. Furthermore, we practically create a piece of curved cartilage and an open-type biomimetic ball joint in combination with bones, ligaments, synovial fluid, and joint capsule to demonstrate the utility of the proposed cartilage sheet in the construction of such joints.
Hardware Design and Learning-Based Software Architecture of Musculoskeletal Wheeled Robot Musashi-W for Real-World Applications
Mar 18, 2024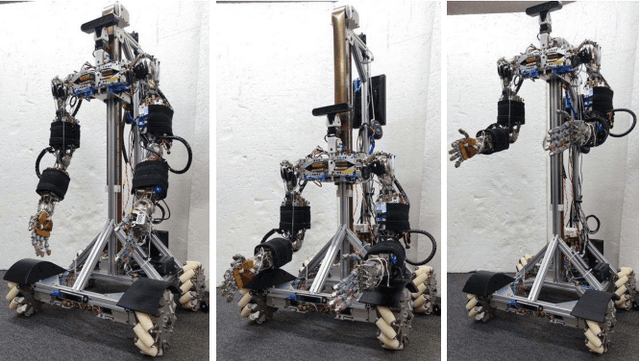
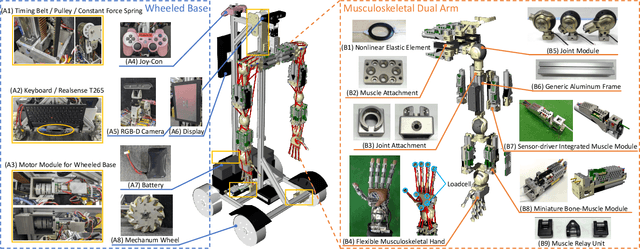
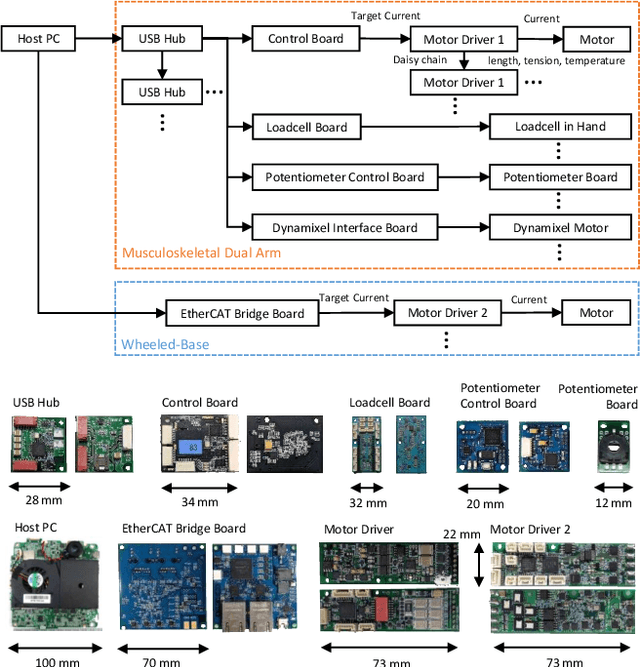
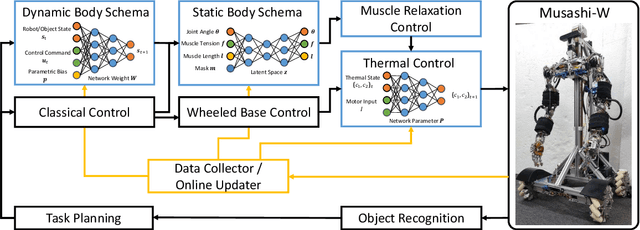
Various musculoskeletal humanoids have been developed so far. While these humanoids have the advantage of their flexible and redundant bodies that mimic the human body, they are still far from being applied to real-world tasks. One of the reasons for this is the difficulty of bipedal walking in a flexible body. Thus, we developed a musculoskeletal wheeled robot, Musashi-W, by combining a wheeled base and musculoskeletal upper limbs for real-world applications. Also, we constructed its software system by combining static and dynamic body schema learning, reflex control, and visual recognition. We show that the hardware and software of Musashi-W can make the most of the advantages of the musculoskeletal upper limbs, through several tasks of cleaning by human teaching, carrying a heavy object considering muscle addition, and setting a table through dynamic cloth manipulation with variable stiffness.
RAMIEL: A Parallel-Wire Driven Monopedal Robot for High and Continuous Jumping
Nov 08, 2023



Legged robots with high locomotive performance have been extensively studied, and various leg structures have been proposed. Especially, a leg structure that can achieve both continuous and high jumps is advantageous for moving around in a three-dimensional environment. In this study, we propose a parallel wire-driven leg structure, which has one DoF of linear motion and two DoFs of rotation and is controlled by six wires, as a structure that can achieve both continuous jumping and high jumping. The proposed structure can simultaneously achieve high controllability on each DoF, long acceleration distance and high power required for jumping. In order to verify the jumping performance of the parallel wire-driven leg structure, we have developed a parallel wire-driven monopedal robot, RAMIEL. RAMIEL is equipped with quasi-direct drive, high power wire winding mechanisms and a lightweight leg, and can achieve a maximum jumping height of 1.6 m and a maximum of seven continuous jumps.