 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign of a Five-Fingered Hand with Full-Fingered Tactile Sensors Using Conductive Filaments and Its Application to Bending after Insertion Motion
Dec 01, 2024



The purpose of this study is to construct a contact point estimation system for the both side of a finger, and to realize a motion of bending the finger after inserting the finger into a tool (hereinafter referred to as the bending after insertion motion). In order to know the contact points of the full finger including the joints, we propose to fabricate a nerve inclusion flexible epidermis by combining a flexible epidermis and a nerve line made of conductive filaments, and estimate the contact position from the change of resistance of the nerve line. A nerve inclusion flexible epidermis attached to a thin fingered robotic hand was combined with a twin-armed robot and tool use experiments were conducted. The contact information can be used for tool use, confirming the effectiveness of the proposed method.
Fundamental Three-Dimensional Configuration of Wire-Wound Muscle-Tendon Complex Drive
Nov 06, 2024For robots to become more versatile and expand their areas of application, their bodies need to be suitable for contact with the environment. When the human body comes into contact with the environment, it is possible for it to continue to move even if the positional relationship between muscles or the shape of the muscles changes. We have already focused on the effect of geometric deformation of muscles and proposed a drive system called wire-wound Muscle-Tendon Complex (ww-MTC), an extension of the wire drive system. Our previous study using a robot with a two-dimensional configuration demonstrated several advantages: reduced wire loosening, interference, and wear; improved robustness during environmental contact; and a muscular appearance. However, this design had some problems, such as excessive muscle expansion that hindered inter-muscle movement, and confinement to planar motion. In this study, we develop the ww-MTC into a three-dimensional shape. We present a fundamental construction method for a muscle exterior that expands gently and can be contacted over its entire surface. We also apply the three-dimensional ww-MTC to a 2-axis 3-muscle robot, and confirm that the robot can continue to move while adapting to its environment.
Patterned Structure Muscle : Arbitrary Shaped Wire-driven Artificial Muscle Utilizing Anisotropic Flexible Structure for Musculoskeletal Robots
Oct 10, 2024Muscles of the human body are composed of tiny actuators made up of myosin and actin filaments. They can exert force in various shapes such as curved or flat, under contact forces and deformations from the environment. On the other hand, muscles in musculoskeletal robots so far have faced challenges in generating force in such shapes and environments. To address this issue, we propose Patterned Structure Muscle (PSM), artificial muscles for musculoskeletal robots. PSM utilizes patterned structures with anisotropic characteristics, wire-driven mechanisms, and is made of flexible material Thermoplastic Polyurethane (TPU) using FDM 3D printing. This method enables the creation of various shapes of muscles, such as simple 1 degree-of-freedom (DOF) muscles, Multi-DOF wide area muscles, joint-covering muscles, and branched muscles. We created an upper arm structure using these muscles to demonstrate wide range of motion, lifting heavy objects, and movements through environmental contact. These experiments show that the proposed PSM is capable of operating in various shapes and environments, and is suitable for the muscles of musculoskeletal robots.
Designing Fluid-Exuding Cartilage for Biomimetic Robots Mimicking Human Joint Lubrication Function
Apr 10, 2024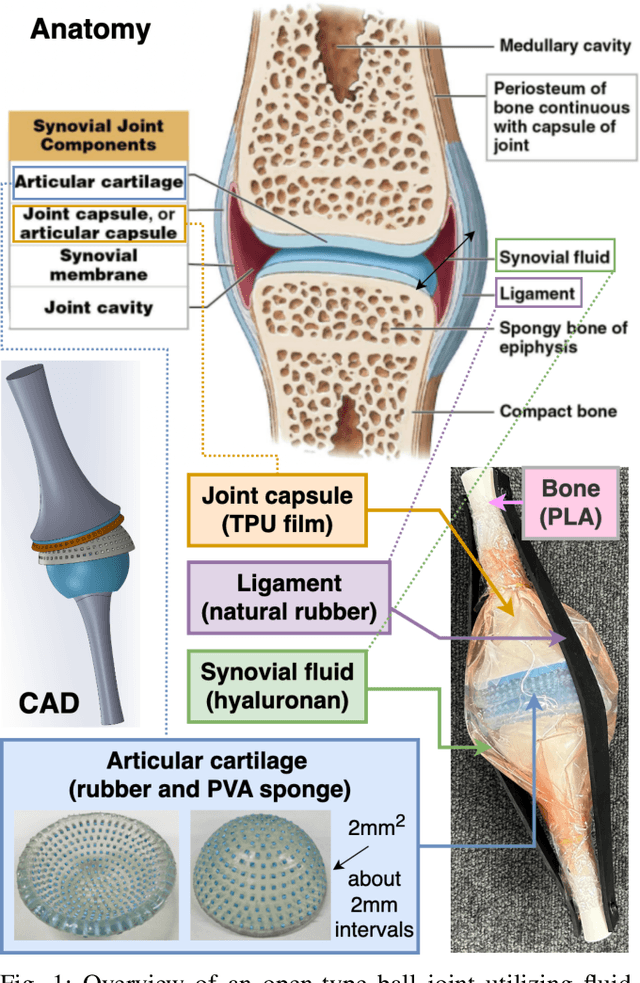
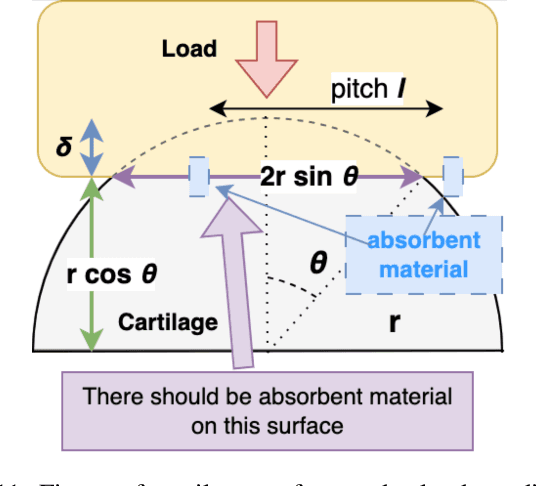
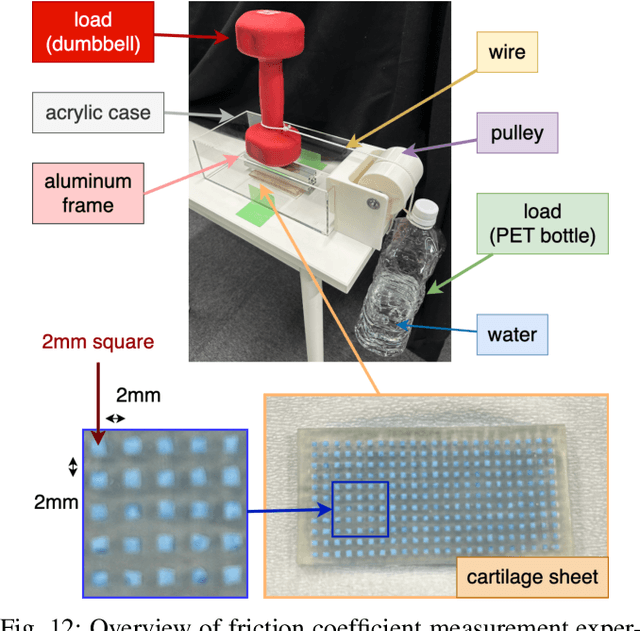
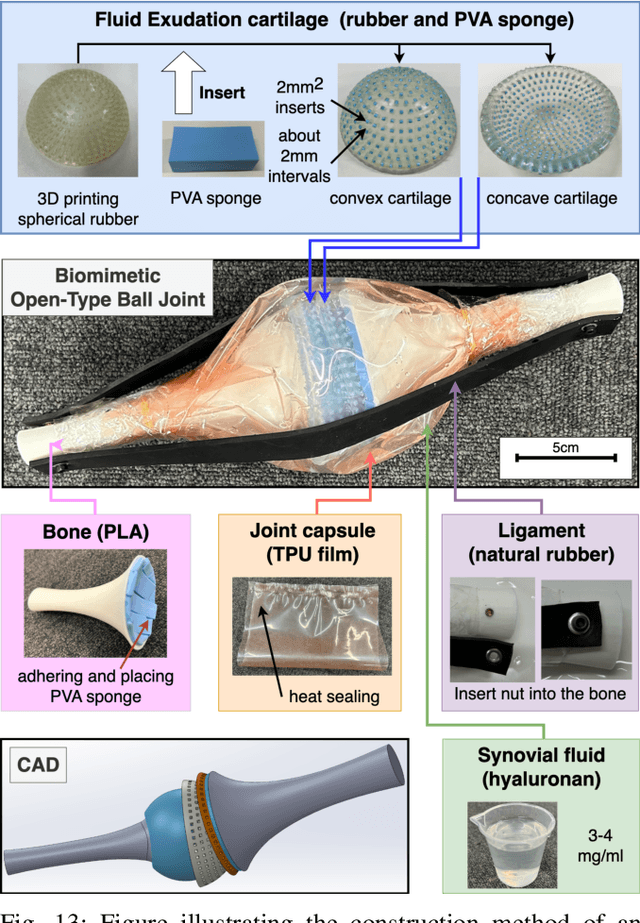
The human joint is an open-type joint composed of bones, cartilage, ligaments, synovial fluid, and joint capsule, having advantages of flexibility and impact resistance. However, replicating this structure in robots introduces friction challenges due to the absence of bearings. To address this, our study focuses on mimicking the fluid-exuding function of human cartilage. We employ a rubber-based 3D printing technique combined with absorbent materials to create a versatile and easily designed cartilage sheet for biomimetic robots. We evaluate both the fluid-exuding function and friction coefficient of the fabricated flat cartilage sheet. Furthermore, we practically create a piece of curved cartilage and an open-type biomimetic ball joint in combination with bones, ligaments, synovial fluid, and joint capsule to demonstrate the utility of the proposed cartilage sheet in the construction of such joints.