 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploring the proprioceptive potential of joint receptors using a biomimetic robotic joint
Apr 08, 2026In neuroscience, joint receptors have traditionally been viewed as limit detectors, providing positional information only at extreme joint angles, while muscle spindles are considered the primary sensors of joint angle position. However, joint receptors are widely distributed throughout the joint capsule, and their full role in proprioception remains unclear. In this study, we specifically focused on mimicking Type I joint receptors, which respond to slow and sustained movements, and quantified their proprioceptive potential using a biomimetic joint developed with robotics technology. Results showed that Type I-like joint receptors alone enabled proprioceptive sensing with an average error of less than 2 degrees in both bending and twisting motions. These findings suggest that joint receptors may play a greater role in proprioception than previously recognized and that the relative contributions of muscle spindles and joint receptors are differentially weighted within neural networks during development and evolution. Furthermore, this work may prompt new discussions on the differential proprioceptive deficits observed between the elbows and knees in patients with hereditary sensory and autonomic neuropathy type III. Together, these findings highlight the potential of biomimetics-based robotic approaches for advancing interdisciplinary research bridging neuroscience, medicine, and robotics.
* 26 pages including supplementary materials (17 pages main text), 6 main figures and 7 supplementary figures. Published in Scientific Reports
Front Hair Styling Robot System Using Path Planning for Root-Centric Strand Adjustment
Jan 19, 2025



Hair styling is a crucial aspect of personal grooming, significantly influenced by the appearance of front hair. While brushing is commonly used both to detangle hair and for styling purposes, existing research primarily focuses on robotic systems for detangling hair, with limited exploration into robotic hair styling. This research presents a novel robotic system designed to automatically adjust front hairstyles, with an emphasis on path planning for root-centric strand adjustment. The system utilizes images to compare the current hair state with the desired target state through an orientation map of hair strands. By concentrating on the differences in hair orientation and specifically targeting adjustments at the root of each strand, the system performs detailed styling tasks. The path planning approach ensures effective alignment of the hairstyle with the target, and a closed-loop mechanism refines these adjustments to accurately evolve the hairstyle towards the desired outcome. Experimental results demonstrate that the proposed system achieves a high degree of similarity and consistency in front hair styling, showing promising results for automated, precise hairstyle adjustments.
Design of a Five-Fingered Hand with Full-Fingered Tactile Sensors Using Conductive Filaments and Its Application to Bending after Insertion Motion
Dec 01, 2024



The purpose of this study is to construct a contact point estimation system for the both side of a finger, and to realize a motion of bending the finger after inserting the finger into a tool (hereinafter referred to as the bending after insertion motion). In order to know the contact points of the full finger including the joints, we propose to fabricate a nerve inclusion flexible epidermis by combining a flexible epidermis and a nerve line made of conductive filaments, and estimate the contact position from the change of resistance of the nerve line. A nerve inclusion flexible epidermis attached to a thin fingered robotic hand was combined with a twin-armed robot and tool use experiments were conducted. The contact information can be used for tool use, confirming the effectiveness of the proposed method.
Integrative Wrapping System for a Dual-Arm Humanoid Robot
Nov 13, 2024



Flexible object manipulation of paper and cloth is a major research challenge in robot manipulation. Although there have been efforts to develop hardware that enables specific actions and to realize a single action of paper folding using sim-to-real and learning, there have been few proposals for humanoid robots and systems that enable continuous, multi-step actions of flexible materials. Wrapping an object with paper and tape is more complex and diverse than traditional manipulation research due to the increased number of objects that need to be handled, as well as the three-dimensionality of the operation. In this research, necessary information is organized and coded based on the characteristics of each object handled in wrapping. We also generalize the hardware configuration, manipulation method, and recognition system that enable humanoid wrapping operations. The system will include manipulation with admittance control focusing on paper tension and state evaluation using point clouds to handle three-dimensional flexible objects. Finally, wrapping objects with different shapes is experimented with to show the generality and effectiveness of the proposed system.
Designing Fluid-Exuding Cartilage for Biomimetic Robots Mimicking Human Joint Lubrication Function
Apr 10, 2024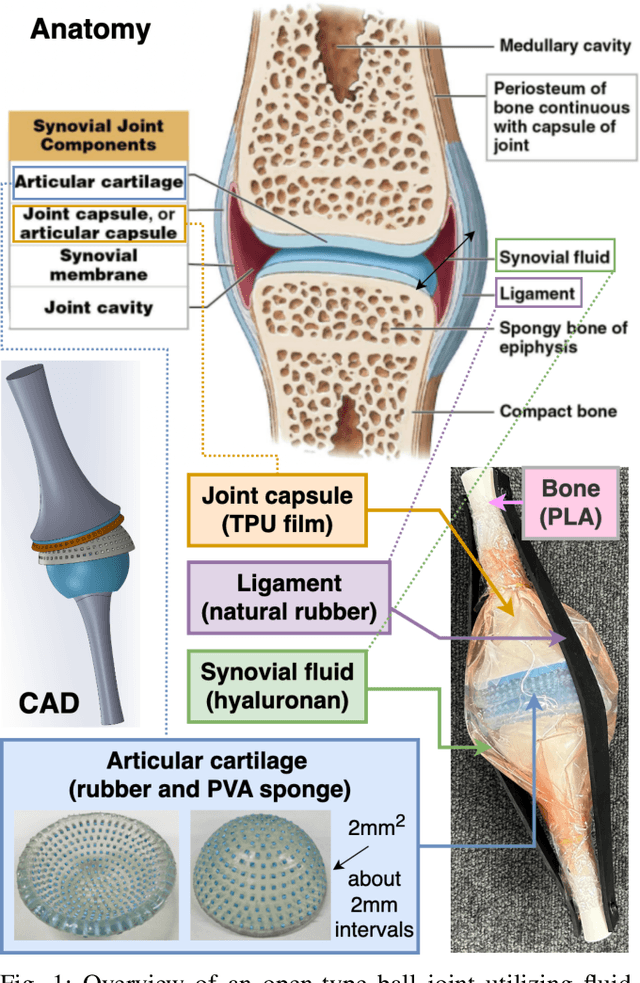
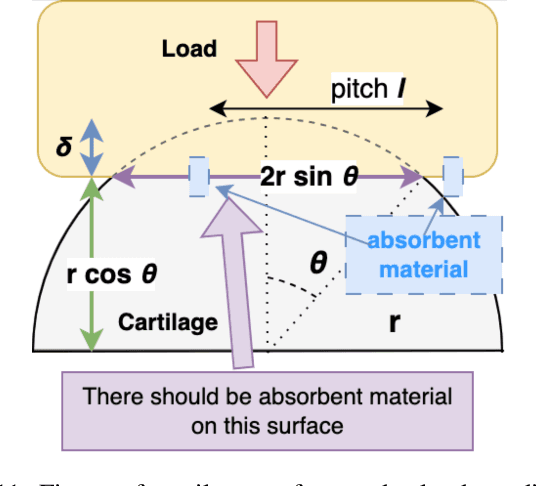
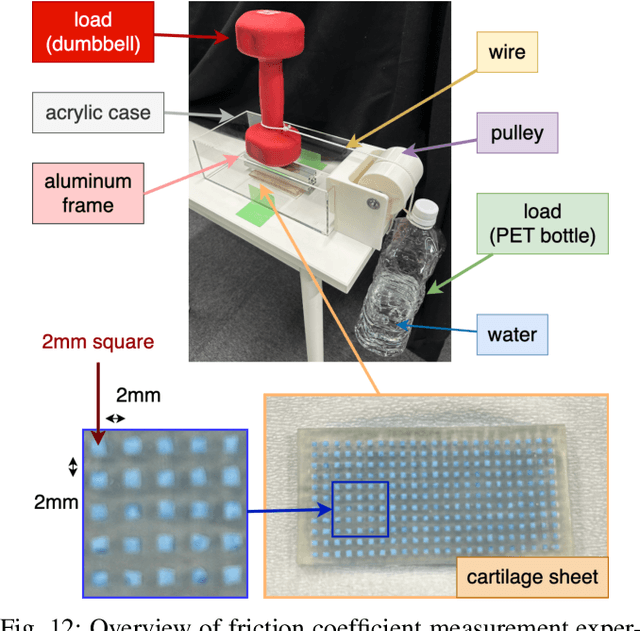
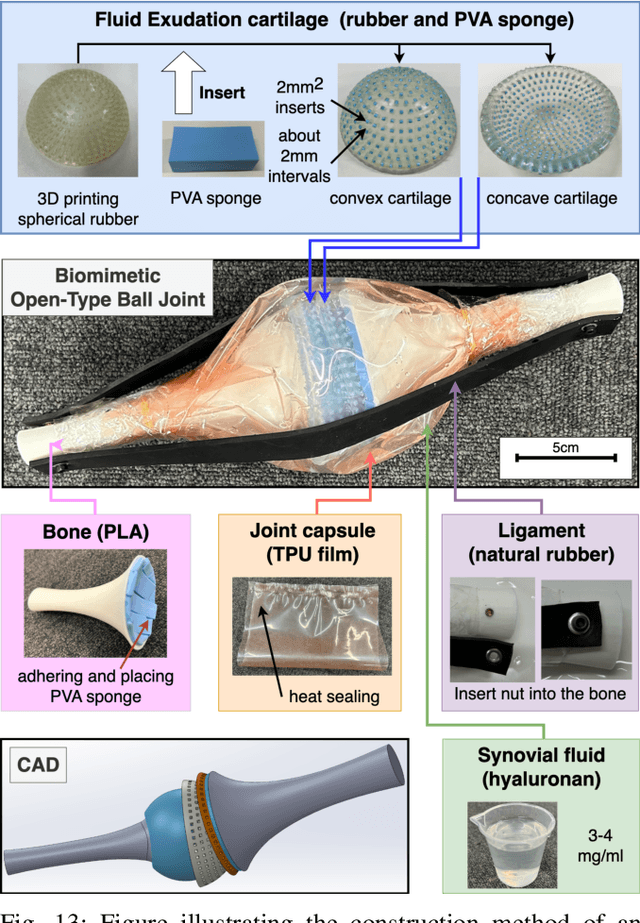
The human joint is an open-type joint composed of bones, cartilage, ligaments, synovial fluid, and joint capsule, having advantages of flexibility and impact resistance. However, replicating this structure in robots introduces friction challenges due to the absence of bearings. To address this, our study focuses on mimicking the fluid-exuding function of human cartilage. We employ a rubber-based 3D printing technique combined with absorbent materials to create a versatile and easily designed cartilage sheet for biomimetic robots. We evaluate both the fluid-exuding function and friction coefficient of the fabricated flat cartilage sheet. Furthermore, we practically create a piece of curved cartilage and an open-type biomimetic ball joint in combination with bones, ligaments, synovial fluid, and joint capsule to demonstrate the utility of the proposed cartilage sheet in the construction of such joints.