 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeToward Autonomous Driving by Musculoskeletal Humanoids: A Study of Developed Hardware and Learning-Based Software
Paper and Code
Jun 08, 2024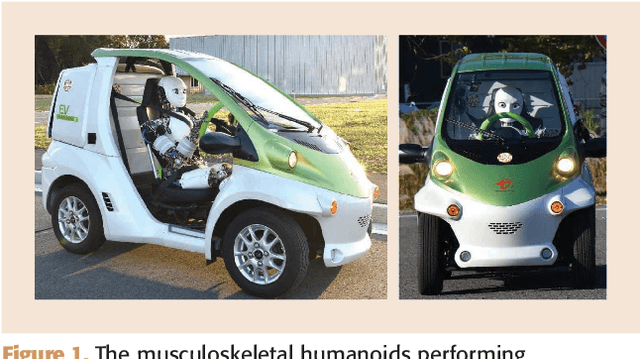
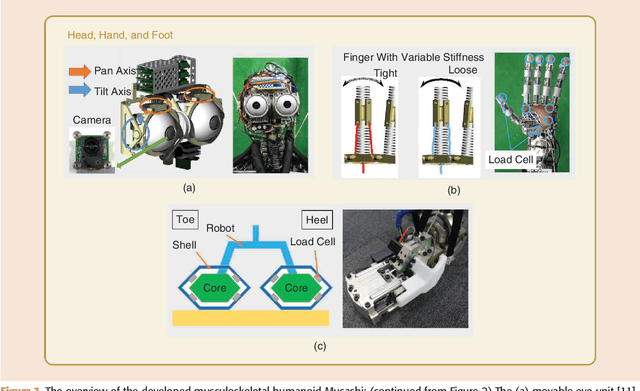

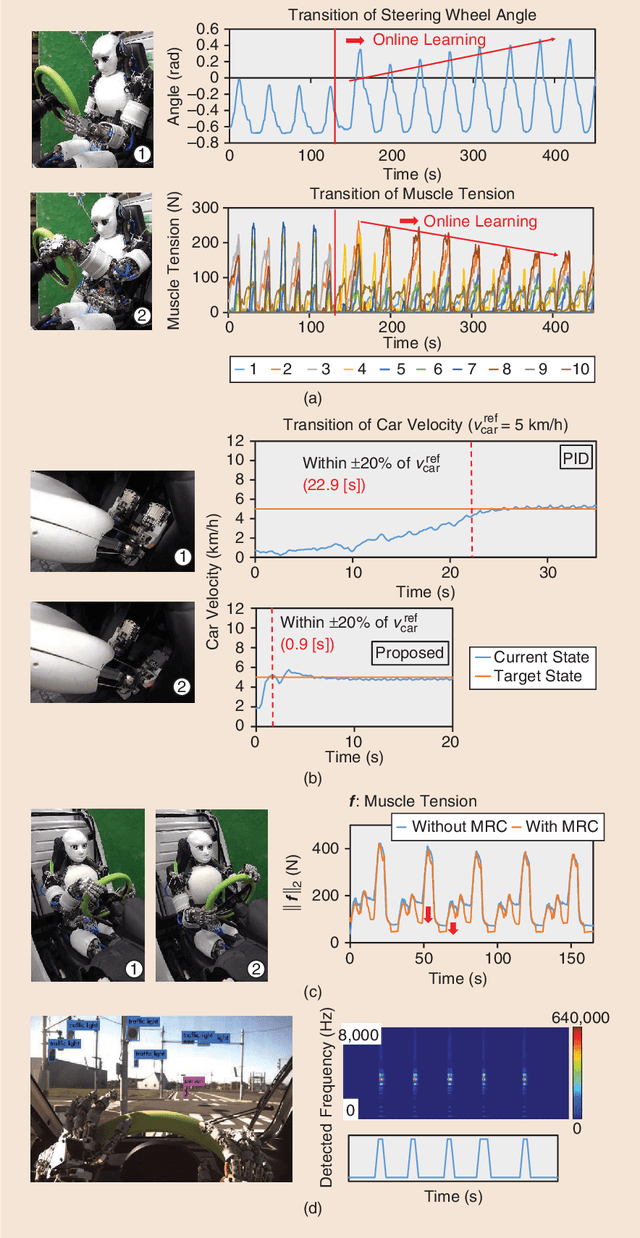
This paper summarizes an autonomous driving project by musculoskeletal humanoids. The musculoskeletal humanoid, which mimics the human body in detail, has redundant sensors and a flexible body structure. These characteristics are suitable for motions with complex environmental contact, and the robot is expected to sit down on the car seat, step on the acceleration and brake pedals, and operate the steering wheel by both arms. We reconsider the developed hardware and software of the musculoskeletal humanoid Musashi in the context of autonomous driving. The respective components of autonomous driving are conducted using the benefits of the hardware and software. Finally, Musashi succeeded in the pedal and steering wheel operations with recognition.