 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeyond Anthropomorphism: Enhancing Grasping and Eliminating a Degree of Freedom by Fusing the Abduction of Digits Four and Five
Sep 16, 2025This paper presents the SABD hand, a 16-degree-of-freedom (DoF) robotic hand that departs from purely anthropomorphic designs to achieve an expanded grasp envelope, enable manipulation poses beyond human capability, and reduce the required number of actuators. This is achieved by combining the adduction/abduction (Add/Abd) joint of digits four and five into a single joint with a large range of motion. The combined joint increases the workspace of the digits by 400\% and reduces the required DoFs while retaining dexterity. Experimental results demonstrate that the combined Add/Abd joint enables the hand to grasp objects with a side distance of up to 200 mm. Reinforcement learning-based investigations show that the design enables grasping policies that are effective not only for handling larger objects but also for achieving enhanced grasp stability. In teleoperated trials, the hand successfully performed 86\% of attempted grasps on suitable YCB objects, including challenging non-anthropomorphic configurations. These findings validate the design's ability to enhance grasp stability, flexibility, and dexterous manipulation without added complexity, making it well-suited for a wide range of applications.
MAPLE: Encoding Dexterous Robotic Manipulation Priors Learned From Egocentric Videos
Apr 08, 2025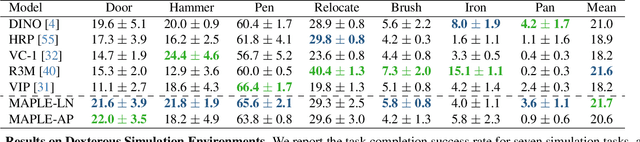

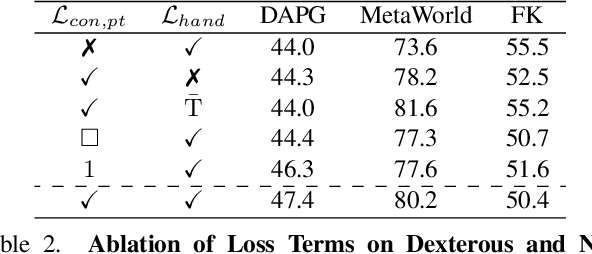
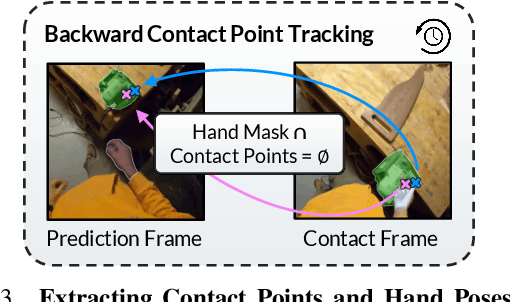
Large-scale egocentric video datasets capture diverse human activities across a wide range of scenarios, offering rich and detailed insights into how humans interact with objects, especially those that require fine-grained dexterous control. Such complex, dexterous skills with precise controls are crucial for many robotic manipulation tasks, yet are often insufficiently addressed by traditional data-driven approaches to robotic manipulation. To address this gap, we leverage manipulation priors learned from large-scale egocentric video datasets to improve policy learning for dexterous robotic manipulation tasks. We present MAPLE, a novel method for dexterous robotic manipulation that exploits rich manipulation priors to enable efficient policy learning and better performance on diverse, complex manipulation tasks. Specifically, we predict hand-object contact points and detailed hand poses at the moment of hand-object contact and use the learned features to train policies for downstream manipulation tasks. Experimental results demonstrate the effectiveness of MAPLE across existing simulation benchmarks, as well as a newly designed set of challenging simulation tasks, which require fine-grained object control and complex dexterous skills. The benefits of MAPLE are further highlighted in real-world experiments using a dexterous robotic hand, whereas simultaneous evaluation across both simulation and real-world experiments has remained underexplored in prior work.
ORCA: An Open-Source, Reliable, Cost-Effective, Anthropomorphic Robotic Hand for Uninterrupted Dexterous Task Learning
Apr 05, 2025
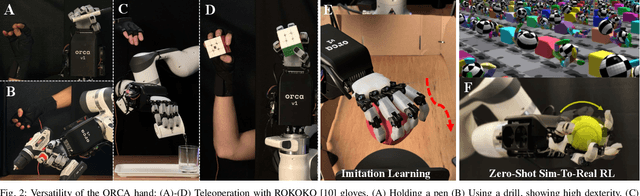
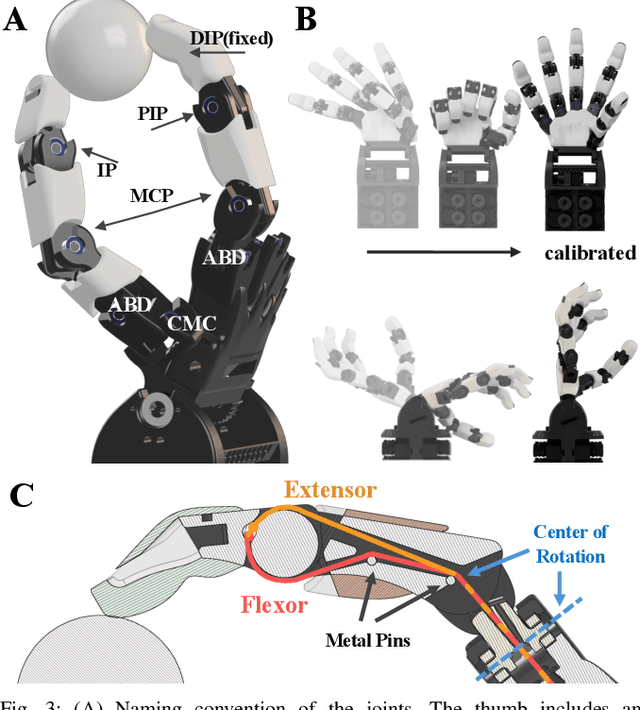
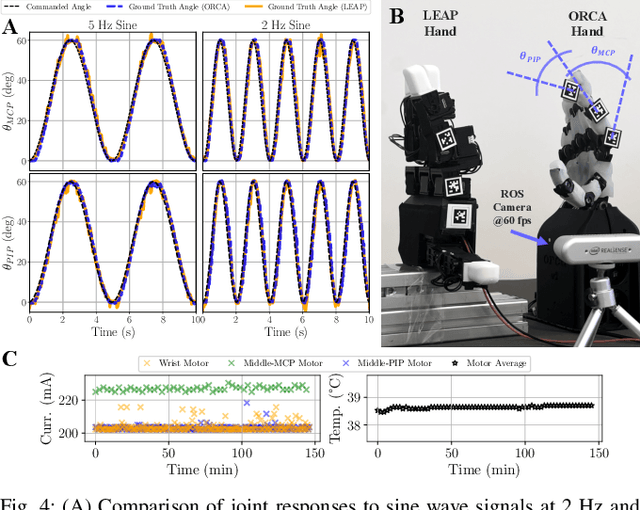
General-purpose robots should possess humanlike dexterity and agility to perform tasks with the same versatility as us. A human-like form factor further enables the use of vast datasets of human-hand interactions. However, the primary bottleneck in dexterous manipulation lies not only in software but arguably even more in hardware. Robotic hands that approach human capabilities are often prohibitively expensive, bulky, or require enterprise-level maintenance, limiting their accessibility for broader research and practical applications. What if the research community could get started with reliable dexterous hands within a day? We present the open-source ORCA hand, a reliable and anthropomorphic 17-DoF tendon-driven robotic hand with integrated tactile sensors, fully assembled in less than eight hours and built for a material cost below 2,000 CHF. We showcase ORCA's key design features such as popping joints, auto-calibration, and tensioning systems that significantly reduce complexity while increasing reliability, accuracy, and robustness. We benchmark the ORCA hand across a variety of tasks, ranging from teleoperation and imitation learning to zero-shot sim-to-real reinforcement learning. Furthermore, we demonstrate its durability, withstanding more than 10,000 continuous operation cycles - equivalent to approximately 20 hours - without hardware failure, the only constraint being the duration of the experiment itself. All design files, source code, and documentation will be available at https://www.orcahand.com/.
VQ-ACE: Efficient Policy Search for Dexterous Robotic Manipulation via Action Chunking Embedding
Nov 05, 2024

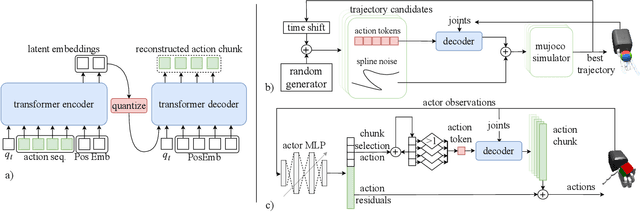
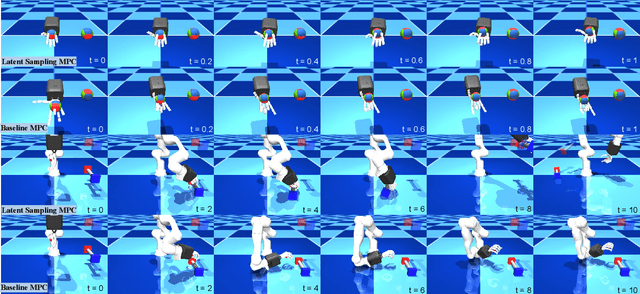
Dexterous robotic manipulation remains a significant challenge due to the high dimensionality and complexity of hand movements required for tasks like in-hand manipulation and object grasping. This paper addresses this issue by introducing Vector Quantized Action Chunking Embedding (VQ-ACE), a novel framework that compresses human hand motion into a quantized latent space, significantly reducing the action space's dimensionality while preserving key motion characteristics. By integrating VQ-ACE with both Model Predictive Control (MPC) and Reinforcement Learning (RL), we enable more efficient exploration and policy learning in dexterous manipulation tasks using a biomimetic robotic hand. Our results show that latent space sampling with MPC produces more human-like behavior in tasks such as Ball Rolling and Object Picking, leading to higher task success rates and reduced control costs. For RL, action chunking accelerates learning and improves exploration, demonstrated through faster convergence in tasks like cube stacking and in-hand cube reorientation. These findings suggest that VQ-ACE offers a scalable and effective solution for robotic manipulation tasks involving complex, high-dimensional state spaces, contributing to more natural and adaptable robotic systems.
Leveraging Pretrained Latent Representations for Few-Shot Imitation Learning on a Dexterous Robotic Hand
Apr 25, 2024In the context of imitation learning applied to dexterous robotic hands, the high complexity of the systems makes learning complex manipulation tasks challenging. However, the numerous datasets depicting human hands in various different tasks could provide us with better knowledge regarding human hand motion. We propose a method to leverage multiple large-scale task-agnostic datasets to obtain latent representations that effectively encode motion subtrajectories that we included in a transformer-based behavior cloning method. Our results demonstrate that employing latent representations yields enhanced performance compared to conventional behavior cloning methods, particularly regarding resilience to errors and noise in perception and proprioception. Furthermore, the proposed approach solely relies on human demonstrations, eliminating the need for teleoperation and, therefore, accelerating the data acquisition process. Accurate inverse kinematics for fingertip retargeting ensures precise transfer from human hand data to the robot, facilitating effective learning and deployment of manipulation policies. Finally, the trained policies have been successfully transferred to a real-world 23Dof robotic system.