 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeORCA: An Open-Source, Reliable, Cost-Effective, Anthropomorphic Robotic Hand for Uninterrupted Dexterous Task Learning
Apr 05, 2025
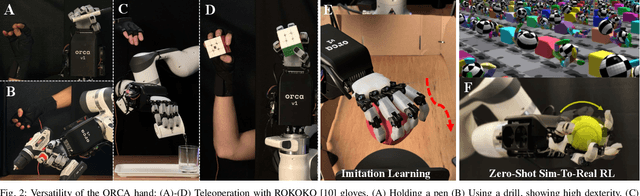
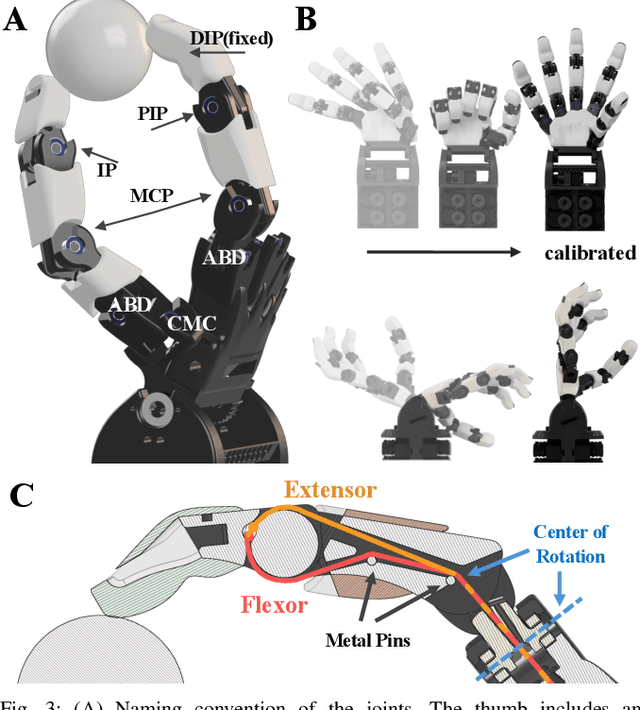
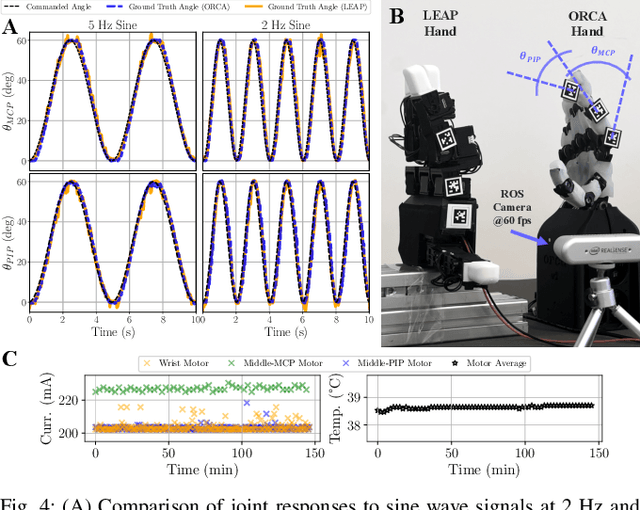
General-purpose robots should possess humanlike dexterity and agility to perform tasks with the same versatility as us. A human-like form factor further enables the use of vast datasets of human-hand interactions. However, the primary bottleneck in dexterous manipulation lies not only in software but arguably even more in hardware. Robotic hands that approach human capabilities are often prohibitively expensive, bulky, or require enterprise-level maintenance, limiting their accessibility for broader research and practical applications. What if the research community could get started with reliable dexterous hands within a day? We present the open-source ORCA hand, a reliable and anthropomorphic 17-DoF tendon-driven robotic hand with integrated tactile sensors, fully assembled in less than eight hours and built for a material cost below 2,000 CHF. We showcase ORCA's key design features such as popping joints, auto-calibration, and tensioning systems that significantly reduce complexity while increasing reliability, accuracy, and robustness. We benchmark the ORCA hand across a variety of tasks, ranging from teleoperation and imitation learning to zero-shot sim-to-real reinforcement learning. Furthermore, we demonstrate its durability, withstanding more than 10,000 continuous operation cycles - equivalent to approximately 20 hours - without hardware failure, the only constraint being the duration of the experiment itself. All design files, source code, and documentation will be available at https://www.orcahand.com/.
High-Frequency Capacitive Sensing for Electrohydraulic Soft Actuators
Apr 08, 2024The need for compliant and proprioceptive actuators has grown more evident in pursuing more adaptable and versatile robotic systems. Hydraulically Amplified Self-Healing Electrostatic (HASEL) actuators offer distinctive advantages with their inherent softness and flexibility, making them promising candidates for various robotic tasks, including delicate interactions with humans and animals, biomimetic locomotion, prosthetics, and exoskeletons. This has resulted in a growing interest in the capacitive self-sensing capabilities of HASEL actuators to create miniature displacement estimation circuitry that does not require external sensors. However, achieving HASEL self-sensing for actuation frequencies above 1 Hz and with miniature high-voltage power supplies has remained limited. In this paper, we introduce the F-HASEL actuator, which adds an additional electrode pair used exclusively for capacitive sensing to a Peano-HASEL actuator. We demonstrate displacement estimation of the F-HASEL during high-frequency actuation up to 20 Hz and during external loading using miniaturized circuitry comprised of low-cost off-the-shelf components and a miniature high-voltage power supply. Finally, we propose a circuitry to estimate the displacement of multiple F-HASELs and demonstrate it in a wearable application to track joint rotations of a virtual reality user in real-time.
Self-Sensing Feedback Control of an Electrohydraulic Robotic Shoulder
Apr 05, 2024The human shoulder, with its glenohumeral joint, tendons, ligaments, and muscles, allows for the execution of complex tasks with precision and efficiency. However, current robotic shoulder designs lack the compliance and compactness inherent in their biological counterparts. A major limitation of these designs is their reliance on external sensors like rotary encoders, which restrict mechanical joint design and introduce bulk to the system. To address this constraint, we present a bio-inspired antagonistic robotic shoulder with two degrees of freedom powered by self-sensing hydraulically amplified self-healing electrostatic actuators. Our artificial muscle design decouples the high-voltage electrostatic actuation from the pair of low-voltage self-sensing electrodes. This approach allows for proprioceptive feedback control of trajectories in the task space while eliminating the necessity for any additional sensors. We assess the platform's efficacy by comparing it to a feedback control based on position data provided by a motion capture system. The study demonstrates closed-loop controllable robotic manipulators based on an inherent self-sensing capability of electrohydraulic actuators. The proposed architecture can serve as a basis for complex musculoskeletal joint arrangements.