 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeORCA: An Open-Source, Reliable, Cost-Effective, Anthropomorphic Robotic Hand for Uninterrupted Dexterous Task Learning
Apr 05, 2025
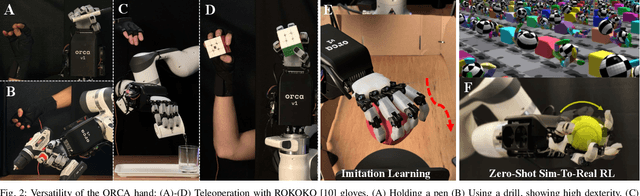
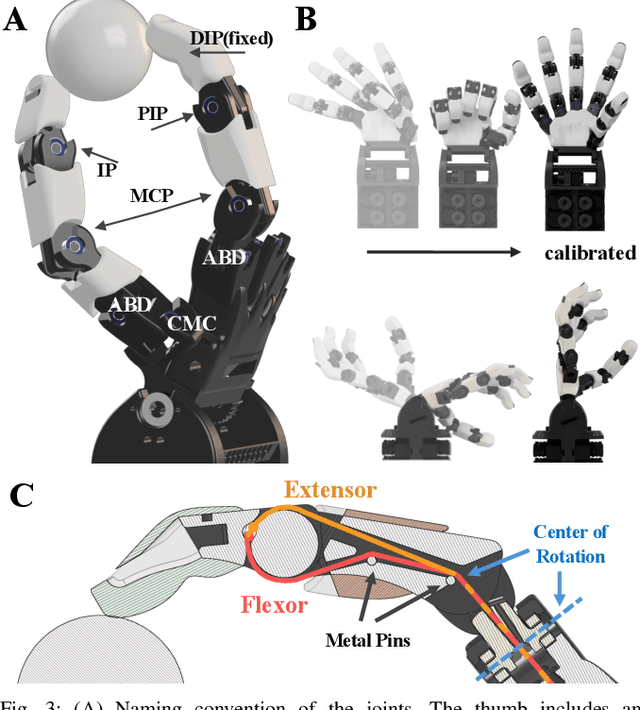
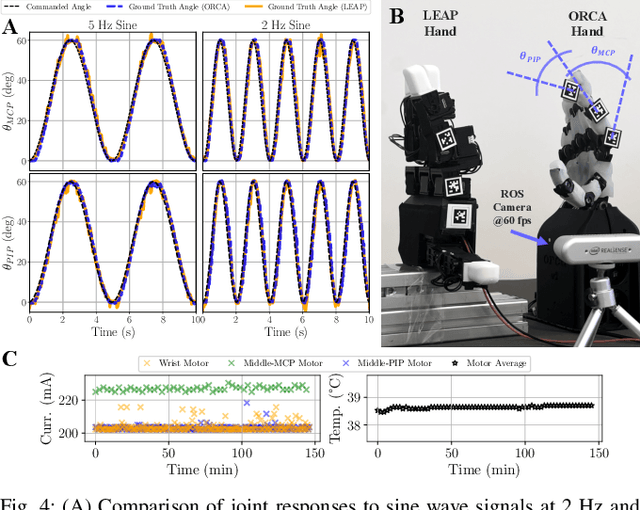
General-purpose robots should possess humanlike dexterity and agility to perform tasks with the same versatility as us. A human-like form factor further enables the use of vast datasets of human-hand interactions. However, the primary bottleneck in dexterous manipulation lies not only in software but arguably even more in hardware. Robotic hands that approach human capabilities are often prohibitively expensive, bulky, or require enterprise-level maintenance, limiting their accessibility for broader research and practical applications. What if the research community could get started with reliable dexterous hands within a day? We present the open-source ORCA hand, a reliable and anthropomorphic 17-DoF tendon-driven robotic hand with integrated tactile sensors, fully assembled in less than eight hours and built for a material cost below 2,000 CHF. We showcase ORCA's key design features such as popping joints, auto-calibration, and tensioning systems that significantly reduce complexity while increasing reliability, accuracy, and robustness. We benchmark the ORCA hand across a variety of tasks, ranging from teleoperation and imitation learning to zero-shot sim-to-real reinforcement learning. Furthermore, we demonstrate its durability, withstanding more than 10,000 continuous operation cycles - equivalent to approximately 20 hours - without hardware failure, the only constraint being the duration of the experiment itself. All design files, source code, and documentation will be available at https://www.orcahand.com/.