 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
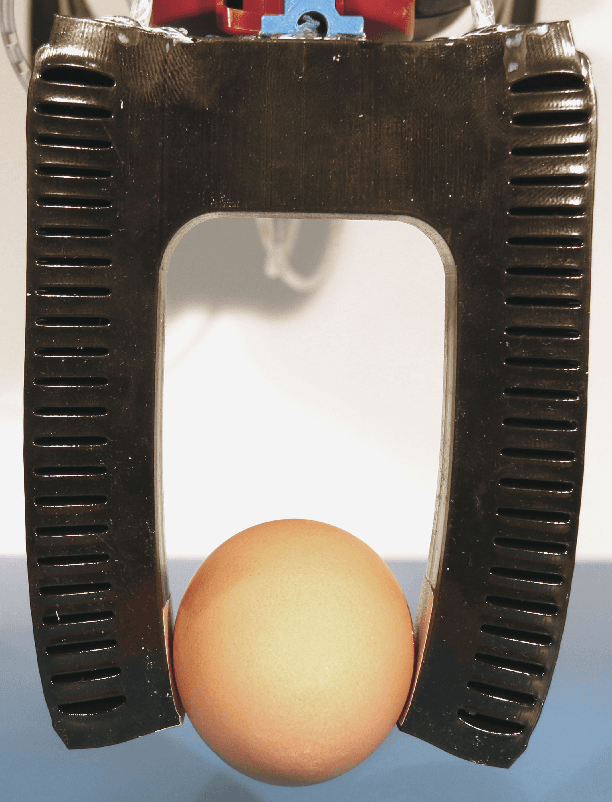
Add to EdgeRobotic Assistant: Completing Collaborative Tasks with Dexterous Vision-Language-Action Models
Oct 29, 2025We adapt a pre-trained Vision-Language-Action (VLA) model (Open-VLA) for dexterous human-robot collaboration with minimal language prompting. Our approach adds (i) FiLM conditioning to visual backbones for task-aware perception, (ii) an auxiliary intent head that predicts collaborator hand pose and target cues, and (iii) action-space post-processing that predicts compact deltas (position/rotation) and PCA-reduced finger joints before mapping to full commands. Using a multi-view, teleoperated Franka and Mimic-hand dataset augmented with MediaPipe hand poses, we demonstrate that delta actions are well-behaved and that four principal components explain ~96% of hand-joint variance. Ablations identify action post-processing as the primary performance driver; auxiliary intent helps, FiLM is mixed, and a directional motion loss is detrimental. A real-time stack (~0.3 s latency on one RTX 4090) composes "pick-up" and "pass" into a long-horizon behavior. We surface "trainer overfitting" to specific demonstrators as the key limitation.
Leveraging Pretrained Latent Representations for Few-Shot Imitation Learning on a Dexterous Robotic Hand
Apr 25, 2024In the context of imitation learning applied to dexterous robotic hands, the high complexity of the systems makes learning complex manipulation tasks challenging. However, the numerous datasets depicting human hands in various different tasks could provide us with better knowledge regarding human hand motion. We propose a method to leverage multiple large-scale task-agnostic datasets to obtain latent representations that effectively encode motion subtrajectories that we included in a transformer-based behavior cloning method. Our results demonstrate that employing latent representations yields enhanced performance compared to conventional behavior cloning methods, particularly regarding resilience to errors and noise in perception and proprioception. Furthermore, the proposed approach solely relies on human demonstrations, eliminating the need for teleoperation and, therefore, accelerating the data acquisition process. Accurate inverse kinematics for fingertip retargeting ensures precise transfer from human hand data to the robot, facilitating effective learning and deployment of manipulation policies. Finally, the trained policies have been successfully transferred to a real-world 23Dof robotic system.
Aquarium: A Fully Differentiable Fluid-Structure Interaction Solver for Robotics Applications
Jan 17, 2023



We present Aquarium, a differentiable fluid-structure interaction solver for robotics that offers stable simulation, accurate coupled robot-fluid physics, and full differentiability with respect to fluid states, robot states, and shape parameters. Aquarium achieves stable simulation with accurate flow physics by integrating over the discrete, incompressible Navier-Stokes equations directly using a fully-implicit Crank-Nicolson scheme with a second-order finite-volume spatial discretization. The robot and fluid physics are coupled using the immersed boundary method by formulating the no-slip condition as an equality constraint applied directly to the Navier-Stokes system. This choice of coupling allows the fluid-structure interaction to be posed and solved as a nonlinear optimization problem. This optimization-based formulation is then exploited using the implicit-function theorem to compute derivatives. The derivatives can then be passed to a gradient-based optimization or learning framework. We demonstrate Aquarium's ability to accurately simulate coupled fluid-solid physics with numerous examples, including a cylinder in free stream and a soft robotic tail with hardware validation. We also demonstrate Aquarium's ability to provide full, analytical gradients by performing both shape and gait optimization of a robotic fish tail to maximize generated thrust.
Sim-to-Real for Soft Robots using Differentiable FEM: Recipes for Meshing, Damping, and Actuation
Feb 17, 2022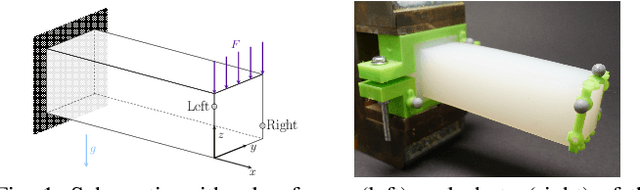
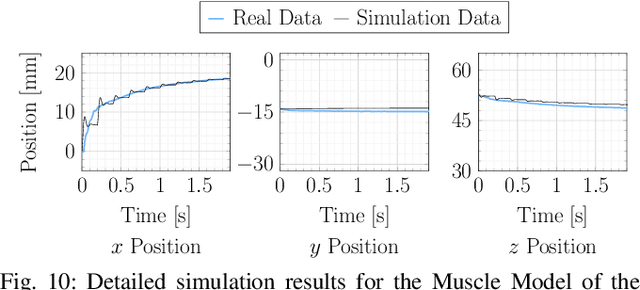
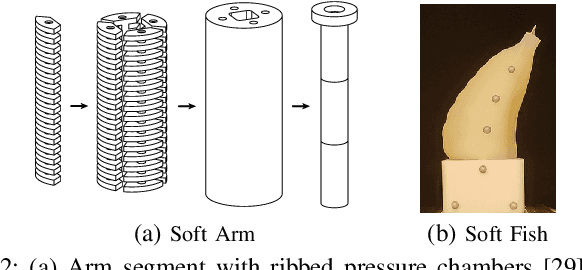
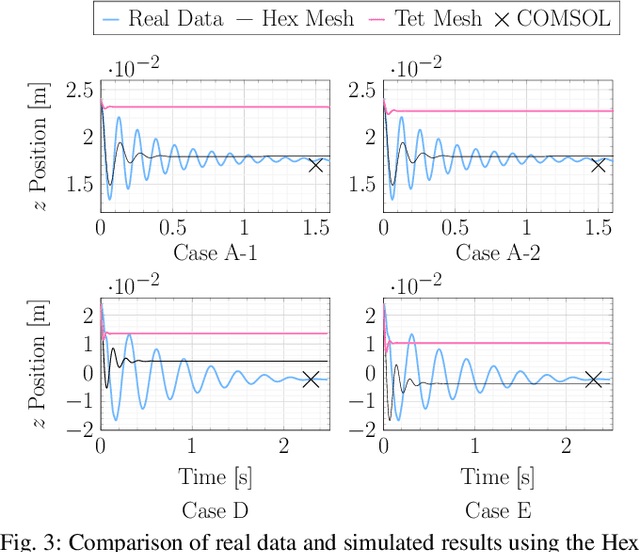
An accurate, physically-based, and differentiable model of soft robots can unlock downstream applications in optimal control. The Finite Element Method (FEM) is an expressive approach for modeling highly deformable structures such as dynamic, elastomeric soft robots. In this paper, we compare virtual robot models simulated using differentiable FEM with measurements from their physical counterparts. In particular, we examine several soft structures with different morphologies: a clamped soft beam under external force, a pneumatically actuated soft robotic arm, and a soft robotic fish tail. We benchmark and analyze different meshing resolutions and elements (tetrahedra and hexahedra), numerical damping, and the efficacy of differentiability for parameter calibration using a simulator based on the fast Differentiable Projective Dynamics (DiffPD). We also advance FEM modeling in application to soft robotics by proposing a predictive model for pneumatic soft robotic actuation. Through our recipes and case studies, we provide strategies and algorithms for matching real-world physics in simulation, making FEM useful for soft robots
SoPrA: Fabrication & Dynamical Modeling of a Scalable Soft Continuum Robotic Arm with Integrated Proprioceptive Sensing
Mar 22, 2021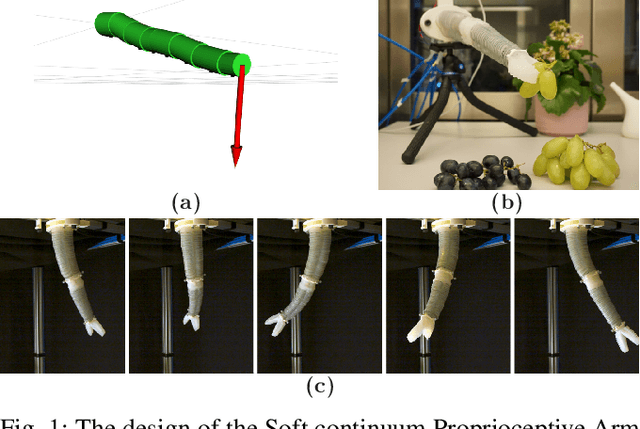
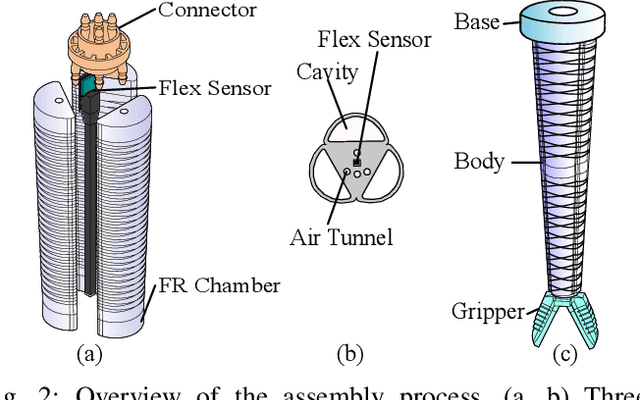
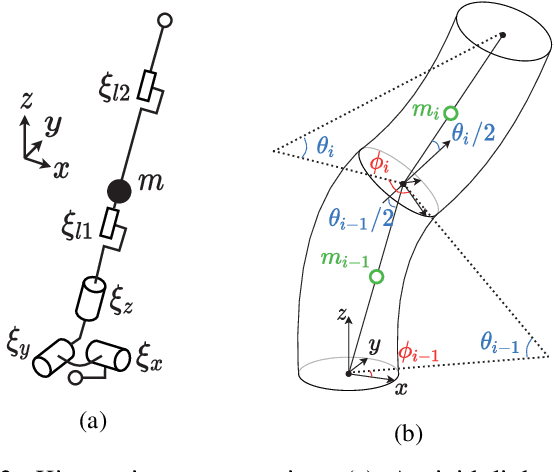
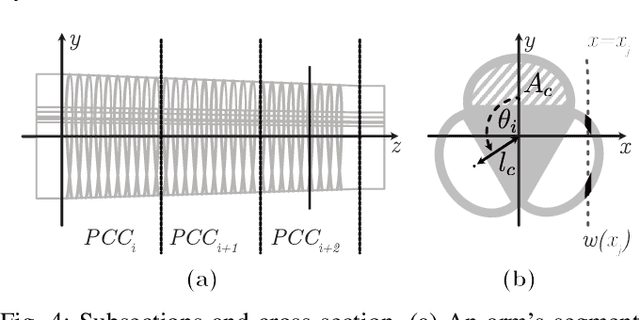
Due to their inherent compliance, soft robots are more versatile than rigid linked robots when they interact with their environment, such as object manipulation or biomimetic motion, and considered the key element in introducing robots to everyday environments. Although various soft robotic actuators exist, past research has focused primarily on designing and analyzing single components. Limited effort has been made to combine each component to create an overall capable, integrated soft robot. Ideally, the behavior of such a robot can be accurately modeled, and its motion within an environment uses its proprioception, without requiring external sensors. This work presents a design and modeling process for a Soft continuum Proprioceptive Arm (SoPrA) actuated by pneumatics. The integrated design is suitable for an analytical model due to its internal capacitive flex sensor for proprioceptive measurements and its fiber-reinforced fluidic elastomer actuators. The proposed analytical dynamical model accounts for the inertial effects of the actuator's mass and the material properties, and predicts in real-time the soft robot's behavior. Our estimation method integrates the analytical model with proprioceptive sensors to calculate external forces, all without relying on an external motion capture system. SoPrA is validated in a series of experiments demonstrating the model's and sensor's accuracy in estimation. SoPrA will enable soft arm manipulation including force sensing while operating in obstructed environments that disallows exteroceptive measurements.
Printable Hydraulics: A Method for Fabricating Robots by 3D Co-Printing Solids and Liquids
Dec 18, 2015


This work introduces a novel technique for fabricating functional robots using 3D printers. Simultaneously depositing photopolymers and a non-curing liquid allows complex, pre-filled fluidic channels to be fabricated. This new printing capability enables complex hydraulically actuated robots and robotic components to be automatically built, with no assembly required. The technique is showcased by printing linear bellows actuators, gear pumps, soft grippers and a hexapod robot, using a commercially-available 3D printer. We detail the steps required to modify the printer and describe the design constraints imposed by this new fabrication approach.