 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Unified Framework for Simulating Strongly-Coupled Fluid-Robot Multiphysics
Jun 05, 2025

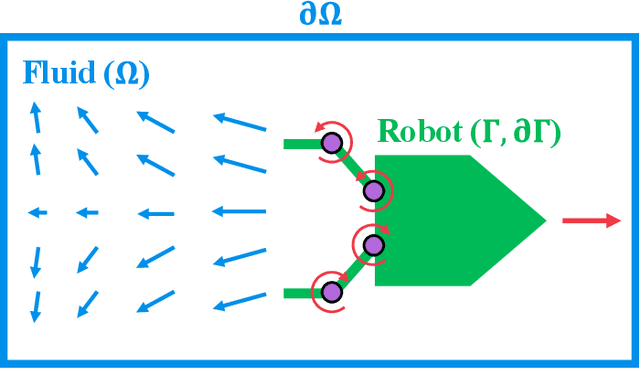
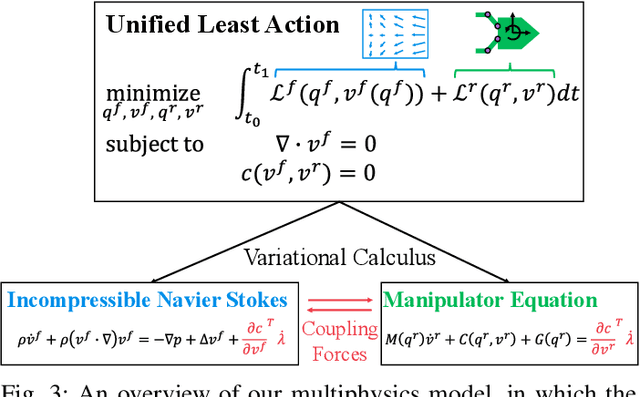
We present a framework for simulating fluid-robot multiphysics as a single, unified optimization problem. The coupled manipulator and incompressible Navier-Stokes equations governing the robot and fluid dynamics are derived together from a single Lagrangian using the principal of least action. We then employ discrete variational mechanics to derive a stable, implicit time-integration scheme for jointly simulating both the fluid and robot dynamics, which are tightly coupled by a constraint that enforces the no-slip boundary condition at the fluid-robot interface. Extending the classical immersed boundary method, we derive a new formulation of the no-slip constraint that is numerically well-conditioned and physically accurate for multibody systems commonly found in robotics. We demonstrate our approach's physical accuracy on benchmark computational fluid-dynamics problems, including Poiseuille flow and a disc in free stream. We then design a locomotion policy for a novel swimming robot in simulation and validate results on real-world hardware, showcasing our framework's sim-to-real capability for robotics tasks.
From Pixels to Torques with Linear Feedback
Jun 26, 2024We demonstrate the effectiveness of simple observer-based linear feedback policies for "pixels-to-torques" control of robotic systems using only a robot-facing camera. Specifically, we show that the matrices of an image-based Luenberger observer (linear state estimator) for a "student" output-feedback policy can be learned from demonstration data provided by a "teacher" state-feedback policy via simple linear-least-squares regression. The resulting linear output-feedback controller maps directly from high-dimensional raw images to torques while being amenable to the rich set of analytical tools from linear systems theory, alowing us to enforce closed-loop stability constraints in the learning problem. We also investigate a nonlinear extension of the method via the Koopman embedding. Finally, we demonstrate the surprising effectiveness of linear pixels-to-torques policies on a cartpole system, both in simulation and on real-world hardware. The policy successfully executes both stabilizing and swing-up trajectory tracking tasks using only camera feedback while subject to model mismatch, process and sensor noise, perturbations, and occlusions.
Accelerating Aquatic Soft Robots with Elastic Instability Effects
Oct 21, 2023



Sinusoidal undulation has long been considered the most successful swimming pattern for fish and bionic aquatic robots [1]. However, a swimming pattern generated by the hair clip mechanism (HCM, part iii, Figure 1A) [2]~[5] may challenge this knowledge. HCM is an in-plane prestressed bi-stable mechanism that stores elastic energy and releases the stored energy quickly via its snap-through buckling. When used for fish robots, the HCM functions as the fish body and creates unique swimming patterns that we term HCM undulation. With the same energy consumption [3], HCM fish outperforms the traditionally designed soft fish with a two-fold increase in cruising speed. We reproduce this phenomenon in a single-link simulation with Aquarium [6]. HCM undulation generates an average propulsion of 16.7 N/m, 2-3 times larger than the reference undulation (6.78 N/m), sine pattern (5.34 N/m/s), and cambering sine pattern (6.36 N/m), and achieves an efficiency close to the sine pattern. These results can aid in developing fish robots and faster swimming patterns.
Aquarium: A Fully Differentiable Fluid-Structure Interaction Solver for Robotics Applications
Jan 17, 2023



We present Aquarium, a differentiable fluid-structure interaction solver for robotics that offers stable simulation, accurate coupled robot-fluid physics, and full differentiability with respect to fluid states, robot states, and shape parameters. Aquarium achieves stable simulation with accurate flow physics by integrating over the discrete, incompressible Navier-Stokes equations directly using a fully-implicit Crank-Nicolson scheme with a second-order finite-volume spatial discretization. The robot and fluid physics are coupled using the immersed boundary method by formulating the no-slip condition as an equality constraint applied directly to the Navier-Stokes system. This choice of coupling allows the fluid-structure interaction to be posed and solved as a nonlinear optimization problem. This optimization-based formulation is then exploited using the implicit-function theorem to compute derivatives. The derivatives can then be passed to a gradient-based optimization or learning framework. We demonstrate Aquarium's ability to accurately simulate coupled fluid-solid physics with numerous examples, including a cylinder in free stream and a soft robotic tail with hardware validation. We also demonstrate Aquarium's ability to provide full, analytical gradients by performing both shape and gait optimization of a robotic fish tail to maximize generated thrust.