 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImplicit Primal-Dual Interior-Point Methods for Quadratic Programming
Apr 01, 2026This paper introduces a new method for solving quadratic programs using primal-dual interior-point methods. Instead of handling complementarity as an explicit equation in the Karush-Kuhn-Tucker (KKT) conditions, we ensure that complementarity is implicitly satisfied by construction. This is achieved by introducing an auxiliary variable and relating it to the duals and slacks via a retraction map. Specifically, we prove that the softplus function has favorable numerical properties compared to the commonly used exponential map. The resulting KKT system is guaranteed to be spectrally bounded, thereby eliminating the most pressing limitation of primal-dual methods: ill-conditioning near the solution. These attributes facilitate the solution of the underlying linear system, either by removing the need to compute factorizations at every iteration, enabling factorization-free approaches like indirect solvers, or allowing the solver to achieve high accuracy in low-precision arithmetic. Consequently, this novel perspective opens new opportunities for interior-point methods, especially for solving large-scale problems to high precision.
ADMM-based Continuous Trajectory Optimization in Graphs of Convex Sets
Mar 11, 2026This paper presents a numerical solver for computing continuous trajectories in non-convex environments. Our approach relies on a customized implementation of the Alternating Direction Method of Multipliers (ADMM) built upon two key components: First, we parameterize trajectories as polynomials, allowing the primal update to be computed in closed form as a minimum-control-effort problem. Second, we introduce the concept of a spatio-temporal allocation graph based on a mixed-integer formulation and pose the slack update as a shortest-path search. The combination of these ingredients results in a solver with several distinct advantages over the state of the art. By jointly optimizing over both discrete spatial and continuous temporal domains, our method accesses a larger search space than existing decoupled approaches, enabling the discovery of superior trajectories. Additionally, the solver's structural robustness ensures reliable convergence from naive initializations, removing the bottleneck of complex warm starting in non-convex environments.
Sound of Touch: Active Acoustic Tactile Sensing via String Vibrations
Feb 18, 2026Distributed tactile sensing remains difficult to scale over large areas: dense sensor arrays increase wiring, cost, and fragility, while many alternatives provide limited coverage or miss fast interaction dynamics. We present Sound of Touch, an active acoustic tactile-sensing methodology that uses vibrating tensioned strings as sensing elements. The string is continuously excited electromagnetically, and a small number of pickups (contact microphones) observe spectral changes induced by contact. From short-duration audio signals, our system estimates contact location and normal force, and detects slip. To guide design and interpret the sensing mechanism, we derive a physics-based string-vibration simulator that predicts how contact position and force shift vibration modes. Experiments demonstrate millimeter-scale localization, reliable force estimation, and real-time slip detection. Our contributions are: (i) a lightweight, scalable string-based tactile sensing hardware concept for instrumenting extended robot surfaces; (ii) a physics-grounded simulation and analysis tool for contact-induced spectral shifts; and (iii) a real-time inference pipeline that maps vibration measurements to contact state.
Convex Maneuver Planning for Spacecraft Collision Avoidance
Oct 21, 2025Conjunction analysis and maneuver planning for spacecraft collision avoidance remains a manual and time-consuming process, typically involving repeated forward simulations of hand-designed maneuvers. With the growing density of satellites in low-Earth orbit (LEO), autonomy is becoming essential for efficiently evaluating and mitigating collisions. In this work, we present an algorithm to design low-thrust collision-avoidance maneuvers for short-term conjunction events. We first formulate the problem as a nonconvex quadratically-constrained quadratic program (QCQP), which we then relax into a convex semidefinite program (SDP) using Shor's relaxation. We demonstrate empirically that the relaxation is tight, which enables the recovery of globally optimal solutions to the original nonconvex problem. Our formulation produces a minimum-energy solution while ensuring a desired probability of collision at the time of closest approach. Finally, if the desired probability of collision cannot be satisfied, we relax this constraint into a penalty, yielding a minimum-risk solution. We validate our algorithm with a high-fidelity simulation of a satellite conjunction in low-Earth orbit with a simulated conjunction data message (CDM), demonstrating its effectiveness in reducing collision risk.
The Trajectory Bundle Method: Unifying Sequential-Convex Programming and Sampling-Based Trajectory Optimization
Sep 30, 2025



We present a unified framework for solving trajectory optimization problems in a derivative-free manner through the use of sequential convex programming. Traditionally, nonconvex optimization problems are solved by forming and solving a sequence of convex optimization problems, where the cost and constraint functions are approximated locally through Taylor series expansions. This presents a challenge for functions where differentiation is expensive or unavailable. In this work, we present a derivative-free approach to form these convex approximations by computing samples of the dynamics, cost, and constraint functions and letting the solver interpolate between them. Our framework includes sample-based trajectory optimization techniques like model-predictive path integral (MPPI) control as a special case and generalizes them to enable features like multiple shooting and general equality and inequality constraints that are traditionally associated with derivative-based sequential convex programming methods. The resulting framework is simple, flexible, and capable of solving a wide variety of practical motion planning and control problems.
Universal Dynamics with Globally Controlled Analog Quantum Simulators
Aug 26, 2025


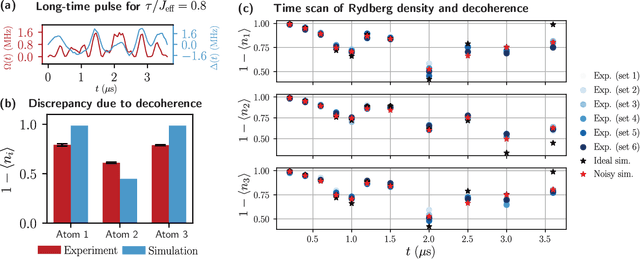
Analog quantum simulators with global control fields have emerged as powerful platforms for exploring complex quantum phenomena. Recent breakthroughs, such as the coherent control of thousands of atoms, highlight the growing potential for quantum applications at scale. Despite these advances, a fundamental theoretical question remains unresolved: to what extent can such systems realize universal quantum dynamics under global control? Here we establish a necessary and sufficient condition for universal quantum computation using only global pulse control, proving that a broad class of analog quantum simulators is, in fact, universal. We further extend this framework to fermionic and bosonic systems, including modern platforms such as ultracold atoms in optical superlattices. Crucially, to connect the theoretical possibility with experimental reality, we introduce a new control technique into the experiment - direct quantum optimal control. This method enables the synthesis of complex effective Hamiltonians and allows us to incorporate realistic hardware constraints. To show its practical power, we experimentally engineer three-body interactions outside the blockade regime and demonstrate topological dynamics on a Rydberg atom array. Using the new control framework, we overcome key experimental challenges, including hardware limitations and atom position fluctuations in the non-blockade regime, by identifying smooth, short-duration pulses that achieve high-fidelity dynamics. Experimental measurements reveal dynamical signatures of symmetry-protected-topological edge modes, confirming both the expressivity and feasibility of our approach. Our work opens a new avenue for quantum simulation beyond native hardware Hamiltonians, enabling the engineering of effective multi-body interactions and advancing the frontier of quantum information processing with globally-controlled analog platforms.
Multi-IMU Sensor Fusion for Legged Robots
Jul 15, 2025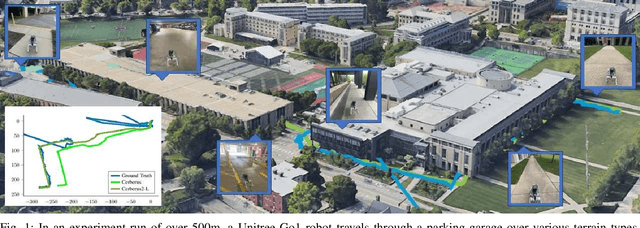
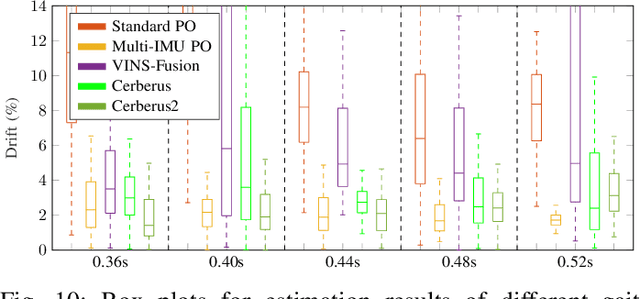
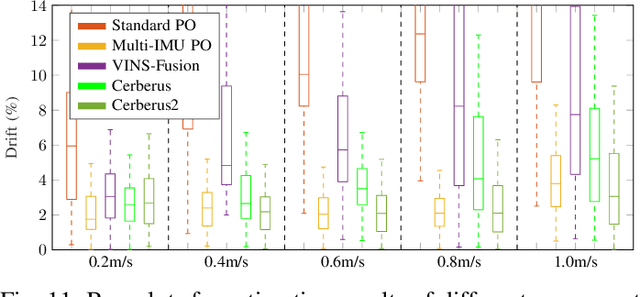
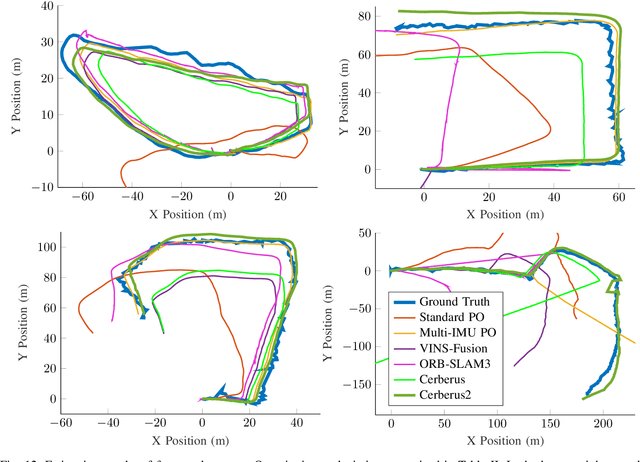
This paper presents a state-estimation solution for legged robots that uses a set of low-cost, compact, and lightweight sensors to achieve low-drift pose and velocity estimation under challenging locomotion conditions. The key idea is to leverage multiple inertial measurement units on different links of the robot to correct a major error source in standard proprioceptive odometry. We fuse the inertial sensor information and joint encoder measurements in an extended Kalman filter, then combine the velocity estimate from this filter with camera data in a factor-graph-based sliding-window estimator to form a visual-inertial-leg odometry method. We validate our state estimator through comprehensive theoretical analysis and hardware experiments performed using real-world robot data collected during a variety of challenging locomotion tasks. Our algorithm consistently achieves minimal position deviation, even in scenarios involving substantial ground impact, foot slippage, and sudden body rotations. A C++ implementation, along with a large-scale dataset, is available at https://github.com/ShuoYangRobotics/Cerberus2.0.
A Unified Framework for Simulating Strongly-Coupled Fluid-Robot Multiphysics
Jun 05, 2025

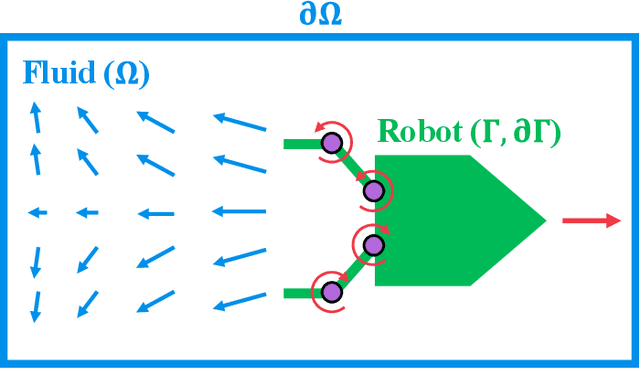
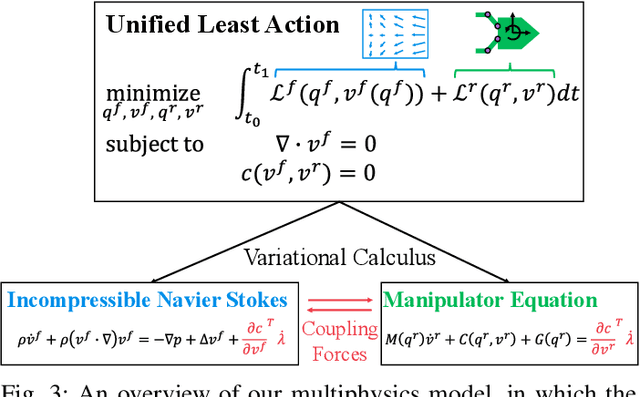
We present a framework for simulating fluid-robot multiphysics as a single, unified optimization problem. The coupled manipulator and incompressible Navier-Stokes equations governing the robot and fluid dynamics are derived together from a single Lagrangian using the principal of least action. We then employ discrete variational mechanics to derive a stable, implicit time-integration scheme for jointly simulating both the fluid and robot dynamics, which are tightly coupled by a constraint that enforces the no-slip boundary condition at the fluid-robot interface. Extending the classical immersed boundary method, we derive a new formulation of the no-slip constraint that is numerically well-conditioned and physically accurate for multibody systems commonly found in robotics. We demonstrate our approach's physical accuracy on benchmark computational fluid-dynamics problems, including Poiseuille flow and a disc in free stream. We then design a locomotion policy for a novel swimming robot in simulation and validate results on real-world hardware, showcasing our framework's sim-to-real capability for robotics tasks.
Whole-Body Model-Predictive Control of Legged Robots with MuJoCo
Mar 06, 2025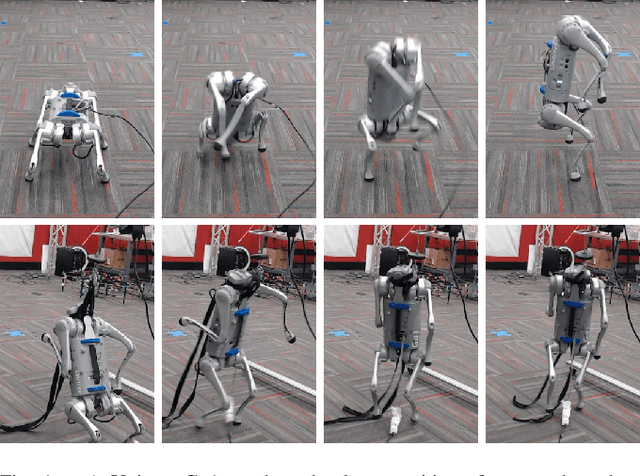
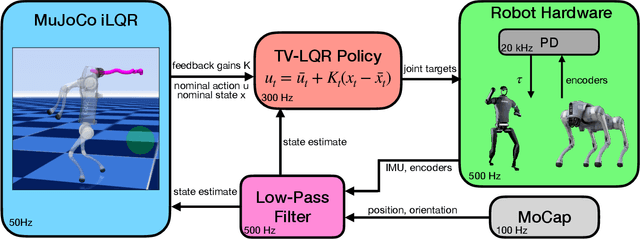
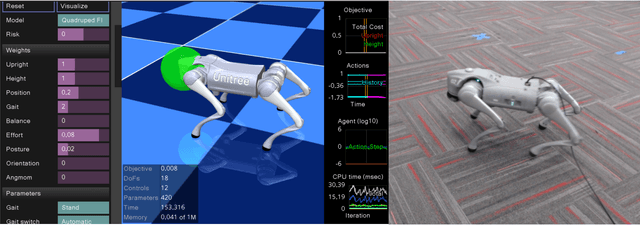
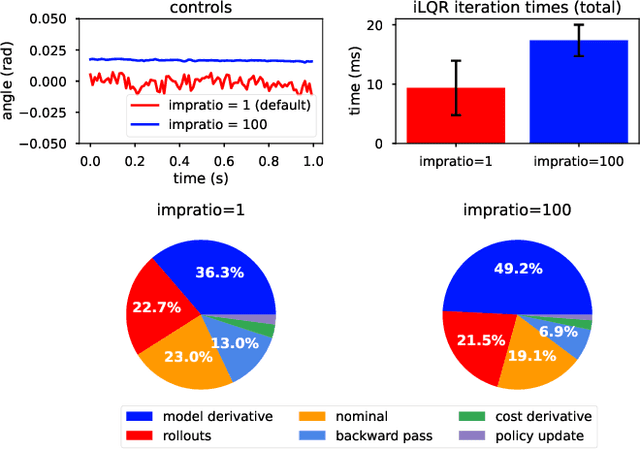
We demonstrate the surprising real-world effectiveness of a very simple approach to whole-body model-predictive control (MPC) of quadruped and humanoid robots: the iterative LQR (iLQR) algorithm with MuJoCo dynamics and finite-difference approximated derivatives. Building upon the previous success of model-based behavior synthesis and control of locomotion and manipulation tasks with MuJoCo in simulation, we show that these policies can easily generalize to the real world with few sim-to-real considerations. Our baseline method achieves real-time whole-body MPC on a variety of hardware experiments, including dynamic quadruped locomotion, quadruped walking on two legs, and full-sized humanoid bipedal locomotion. We hope this easy-to-reproduce hardware baseline lowers the barrier to entry for real-world whole-body MPC research and contributes to accelerating research velocity in the community. Our code and experiment videos will be available online at:https://johnzhang3.github.io/mujoco_ilqr
Wallbounce : Push wall to navigate with Contact-Implicit MPC
Nov 03, 2024



In this work, we introduce a framework that enables highly maneuverable locomotion using non-periodic contacts. This task is challenging for traditional optimization and planning methods to handle due to difficulties in specifying contact mode sequences in real-time. To address this, we use a bi-level contact-implicit planner and hybrid model predictive controller to draft and execute a motion plan. We investigate how this method allows us to plan arm contact events on the shmoobot, a smaller ballbot, which uses an inverse mouse-ball drive to achieve dynamic balancing with a low number of actuators. Through multiple experiments we show how the arms allow for acceleration, deceleration and dynamic obstacle avoidance that are not achievable with the mouse-ball drive alone. This demonstrates how a holistic approach to locomotion can increase the control authority of unique robot morpohologies without additional hardware by leveraging robot arms that are typically used only for manipulation. Project website: https://cmushmoobot.github.io/Wallbounce