 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-IMU Sensor Fusion for Legged Robots
Jul 15, 2025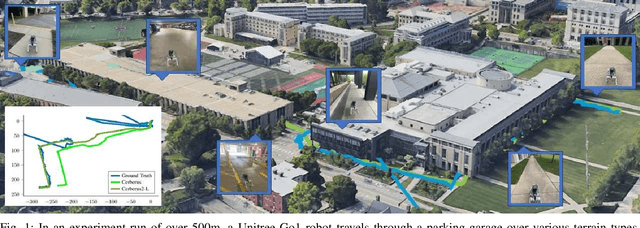
This paper presents a state-estimation solution for legged robots that uses a set of low-cost, compact, and lightweight sensors to achieve low-drift pose and velocity estimation under challenging locomotion conditions. The key idea is to leverage multiple inertial measurement units on different links of the robot to correct a major error source in standard proprioceptive odometry. We fuse the inertial sensor information and joint encoder measurements in an extended Kalman filter, then combine the velocity estimate from this filter with camera data in a factor-graph-based sliding-window estimator to form a visual-inertial-leg odometry method. We validate our state estimator through comprehensive theoretical analysis and hardware experiments performed using real-world robot data collected during a variety of challenging locomotion tasks. Our algorithm consistently achieves minimal position deviation, even in scenarios involving substantial ground impact, foot slippage, and sudden body rotations. A C++ implementation, along with a large-scale dataset, is available at https://github.com/ShuoYangRobotics/Cerberus2.0.
A Convex Formulation of the Soft-Capture Problem
May 01, 2024



We present a fast trajectory optimization algorithm for the soft capture of uncooperative tumbling space objects. Our algorithm generates safe, dynamically feasible, and minimum-fuel trajectories for a six-degree-of-freedom servicing spacecraft to achieve soft capture (near-zero relative velocity at contact) between predefined locations on the servicer spacecraft and target body. We solve a convex problem by enforcing a convex relaxation of the field-of-view constraint, followed by a sequential convex program correcting the trajectory for collision avoidance. The optimization problems can be solved with a standard second-order cone programming solver, making the algorithm both fast and practical for implementation in flight software. We demonstrate the performance and robustness of our algorithm in simulation over a range of object tumble rates up to 10{\deg}/s.