 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSumo: Dynamic and Generalizable Whole-Body Loco-Manipulation
Apr 09, 2026This paper presents a sim-to-real approach that enables legged robots to dynamically manipulate large and heavy objects with whole-body dexterity. Our key insight is that by performing test-time steering of a pre-trained whole-body control policy with a sample-based planner, we can enable these robots to solve a variety of dynamic loco-manipulation tasks. Interestingly, we find our method generalizes to a diverse set of objects and tasks with no additional tuning or training, and can be further enhanced by flexibly adjusting the cost function at test time. We demonstrate the capabilities of our approach through a variety of challenging loco-manipulation tasks on a Spot quadruped robot in the real world, including uprighting a tire heavier than the robot's nominal lifting capacity and dragging a crowd-control barrier larger and taller than the robot itself. Additionally, we show that the same approach can be generalized to humanoid loco-manipulation tasks, such as opening a door and pushing a table, in simulation. Project code and videos are available at \href{https://sumo.rai-inst.com/}{https://sumo.rai-inst.com/}.
The Trajectory Bundle Method: Unifying Sequential-Convex Programming and Sampling-Based Trajectory Optimization
Sep 30, 2025



We present a unified framework for solving trajectory optimization problems in a derivative-free manner through the use of sequential convex programming. Traditionally, nonconvex optimization problems are solved by forming and solving a sequence of convex optimization problems, where the cost and constraint functions are approximated locally through Taylor series expansions. This presents a challenge for functions where differentiation is expensive or unavailable. In this work, we present a derivative-free approach to form these convex approximations by computing samples of the dynamics, cost, and constraint functions and letting the solver interpolate between them. Our framework includes sample-based trajectory optimization techniques like model-predictive path integral (MPPI) control as a special case and generalizes them to enable features like multiple shooting and general equality and inequality constraints that are traditionally associated with derivative-based sequential convex programming methods. The resulting framework is simple, flexible, and capable of solving a wide variety of practical motion planning and control problems.
Multi-IMU Sensor Fusion for Legged Robots
Jul 15, 2025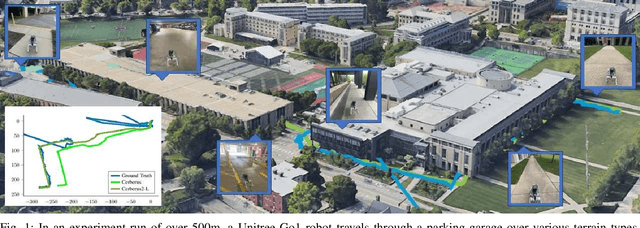
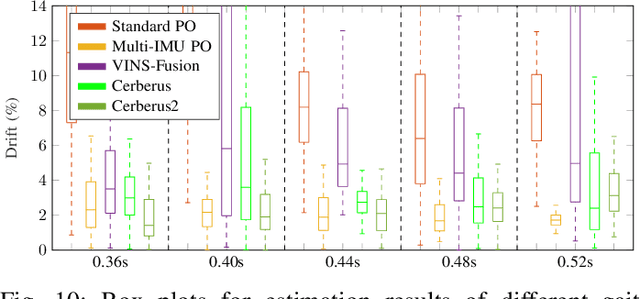
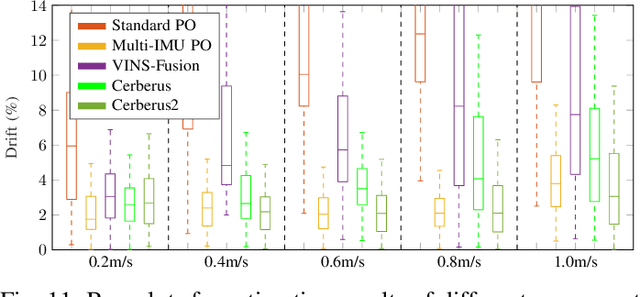
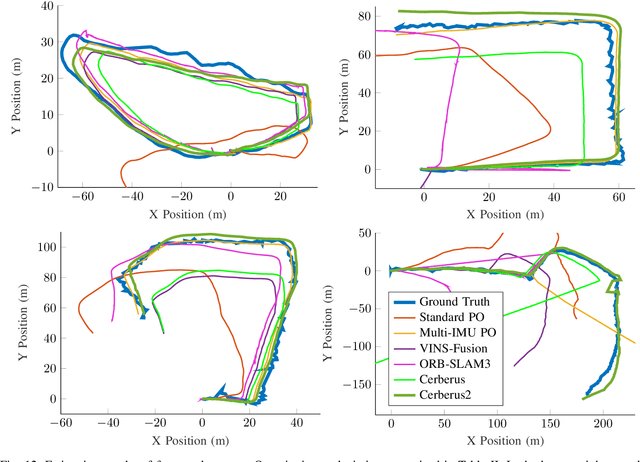
This paper presents a state-estimation solution for legged robots that uses a set of low-cost, compact, and lightweight sensors to achieve low-drift pose and velocity estimation under challenging locomotion conditions. The key idea is to leverage multiple inertial measurement units on different links of the robot to correct a major error source in standard proprioceptive odometry. We fuse the inertial sensor information and joint encoder measurements in an extended Kalman filter, then combine the velocity estimate from this filter with camera data in a factor-graph-based sliding-window estimator to form a visual-inertial-leg odometry method. We validate our state estimator through comprehensive theoretical analysis and hardware experiments performed using real-world robot data collected during a variety of challenging locomotion tasks. Our algorithm consistently achieves minimal position deviation, even in scenarios involving substantial ground impact, foot slippage, and sudden body rotations. A C++ implementation, along with a large-scale dataset, is available at https://github.com/ShuoYangRobotics/Cerberus2.0.
Whole-Body Model-Predictive Control of Legged Robots with MuJoCo
Mar 06, 2025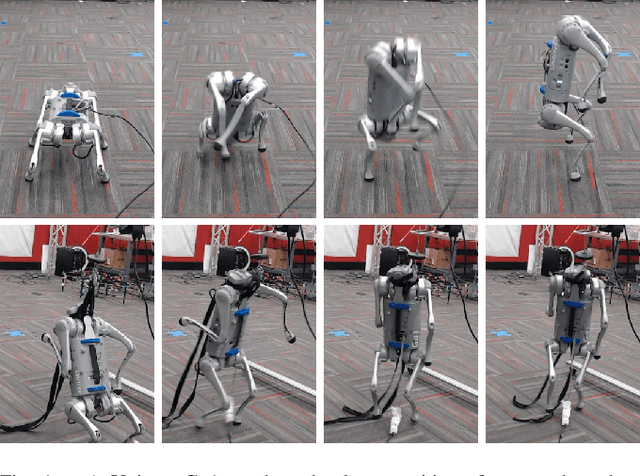
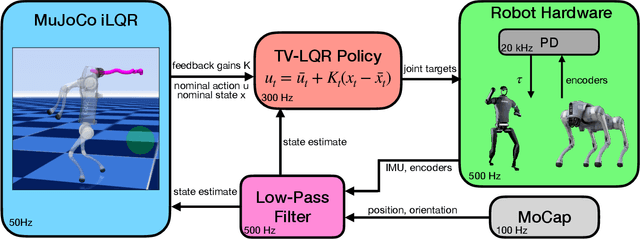
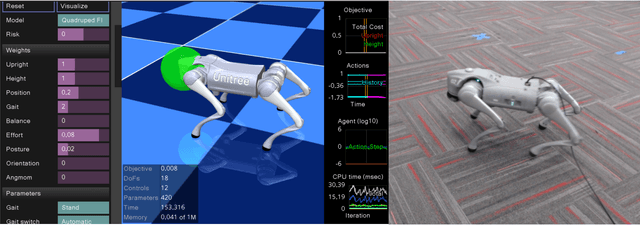
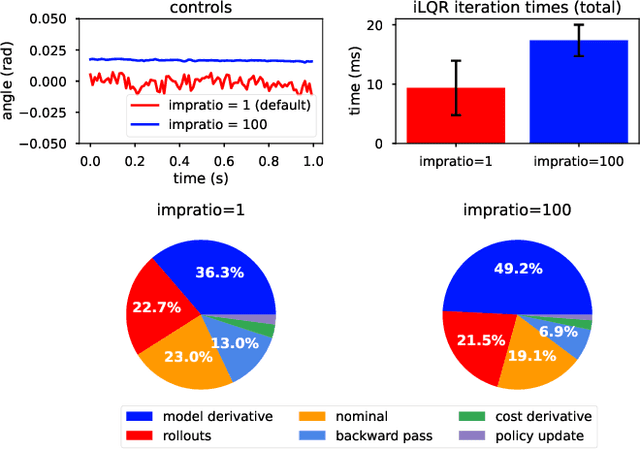
We demonstrate the surprising real-world effectiveness of a very simple approach to whole-body model-predictive control (MPC) of quadruped and humanoid robots: the iterative LQR (iLQR) algorithm with MuJoCo dynamics and finite-difference approximated derivatives. Building upon the previous success of model-based behavior synthesis and control of locomotion and manipulation tasks with MuJoCo in simulation, we show that these policies can easily generalize to the real world with few sim-to-real considerations. Our baseline method achieves real-time whole-body MPC on a variety of hardware experiments, including dynamic quadruped locomotion, quadruped walking on two legs, and full-sized humanoid bipedal locomotion. We hope this easy-to-reproduce hardware baseline lowers the barrier to entry for real-world whole-body MPC research and contributes to accelerating research velocity in the community. Our code and experiment videos will be available online at:https://johnzhang3.github.io/mujoco_ilqr
Wallbounce : Push wall to navigate with Contact-Implicit MPC
Nov 03, 2024



In this work, we introduce a framework that enables highly maneuverable locomotion using non-periodic contacts. This task is challenging for traditional optimization and planning methods to handle due to difficulties in specifying contact mode sequences in real-time. To address this, we use a bi-level contact-implicit planner and hybrid model predictive controller to draft and execute a motion plan. We investigate how this method allows us to plan arm contact events on the shmoobot, a smaller ballbot, which uses an inverse mouse-ball drive to achieve dynamic balancing with a low number of actuators. Through multiple experiments we show how the arms allow for acceleration, deceleration and dynamic obstacle avoidance that are not achievable with the mouse-ball drive alone. This demonstrates how a holistic approach to locomotion can increase the control authority of unique robot morpohologies without additional hardware by leveraging robot arms that are typically used only for manipulation. Project website: https://cmushmoobot.github.io/Wallbounce
Robots with Attitude: Singularity-Free Quaternion-Based Model-Predictive Control for Agile Legged Robots
Sep 17, 2024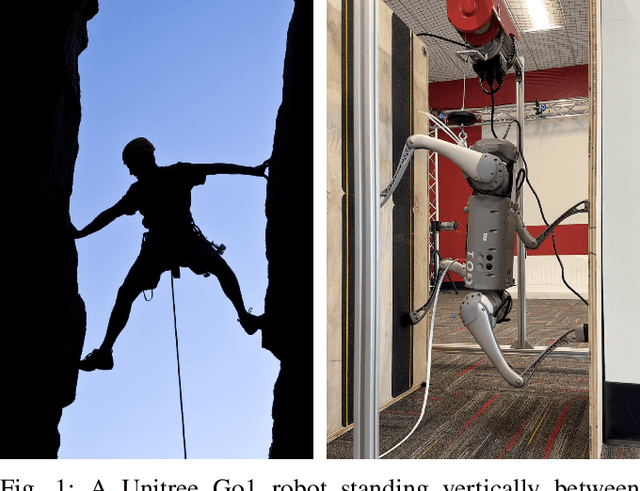
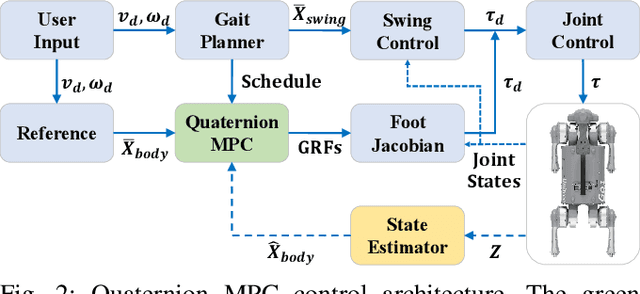
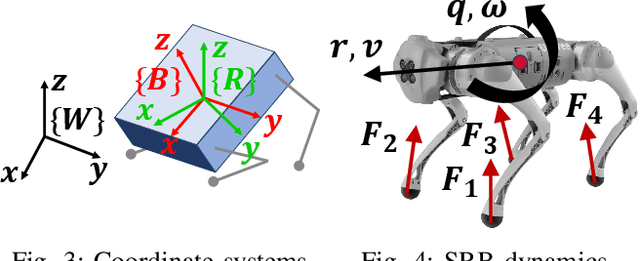
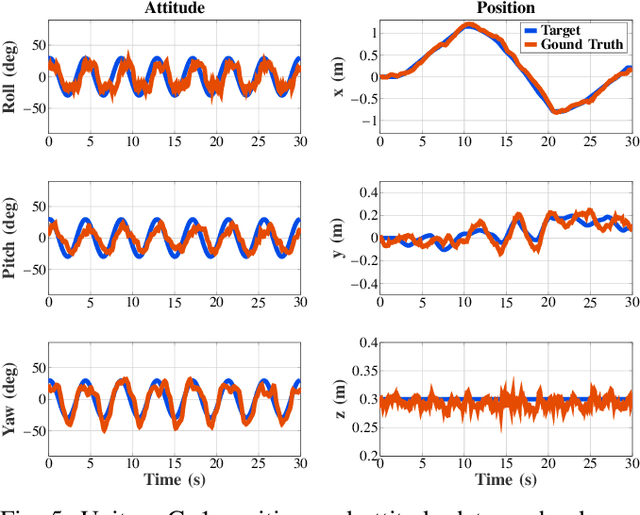
We present a model-predictive control (MPC) framework for legged robots that avoids the singularities associated with common three-parameter attitude representations like Euler angles during large-angle rotations. Our method parameterizes the robot's attitude with singularity-free unit quaternions and makes modifications to the iterative linear-quadratic regulator (iLQR) algorithm to deal with the resulting geometry. The derivation of our algorithm requires only elementary calculus and linear algebra, deliberately avoiding the abstraction and notation of Lie groups. We demonstrate the performance and computational efficiency of quaternion MPC in several experiments on quadruped and humanoid robots.
Real-Time Whole-Body Control of Legged Robots with Model-Predictive Path Integral Control
Sep 16, 2024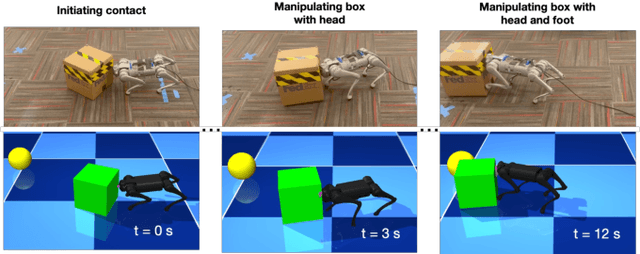



This paper presents a system for enabling real-time synthesis of whole-body locomotion and manipulation policies for real-world legged robots. Motivated by recent advancements in robot simulation, we leverage the efficient parallelization capabilities of the MuJoCo simulator to achieve fast sampling over the robot state and action trajectories. Our results show surprisingly effective real-world locomotion and manipulation capabilities with a very simple control strategy. We demonstrate our approach on several hardware and simulation experiments: robust locomotion over flat and uneven terrains, climbing over a box whose height is comparable to the robot, and pushing a box to a goal position. To our knowledge, this is the first successful deployment of whole-body sampling-based MPC on real-world legged robot hardware. Experiment videos and code can be found at: https://whole-body-mppi.github.io/
The UmboMic: A PVDF Cantilever Microphone
Dec 22, 2023Objective: We present the "UmboMic," a prototype piezoelectric cantilever microphone designed for future use with totally-implantable cochlear implants. Methods: The UmboMic sensor is made from polyvinylidene difluoride (PVDF) because of its low Young's modulus and biocompatibility. The sensor is designed to fit in the middle ear and measure the motion of the underside of the eardrum at the umbo. To maximize its performance, we developed a low noise charge amplifier in tandem with the UmboMic sensor. This paper presents the performance of the UmboMic sensor and amplifier in fresh cadaveric human temporal bones. Results: When tested in human temporal bones, the UmboMic apparatus achieves an equivalent input noise of 32.3 dB SPL over the frequency range 100 Hz to 7 kHz, good linearity, and a flat frequency response to within 10 dB from about 100 Hz to 6 kHz. Conclusion: These results demonstrate the feasibility of a PVDF-based microphone when paired with a low-noise amplifier. The reported UmboMic apparatus is comparable in performance to a conventional hearing aid microphone. Significance: The proof-of-concept UmboMic apparatus is a promising step towards creating a totally-implantable cochlear implant. A completely internal system would enhance the quality of life of cochlear implant users.
An Implantable Piezofilm Middle Ear Microphone: Performance in Human Cadaveric Temporal Bones
Dec 22, 2023Purpose: One of the major reasons that totally implantable cochlear microphones are not readily available is the lack of good implantable microphones. An implantable microphone has the potential to provide a range of benefits over external microphones for cochlear implant users including the filtering ability of the outer ear, cosmetics, and usability in all situations. This paper presents results from experiments in human cadaveric ears of a piezofilm microphone concept under development as a possible component of a future implantable microphone system for use with cochlear implants. This microphone is referred to here as a drum microphone (DrumMic) that senses the robust and predictable motion of the umbo, the tip of the malleus. Methods: The performance was measured of five DrumMics inserted in four different human cadaveric temporal bones. Sensitivity, linearity, bandwidth, and equivalent input noise were measured during these experiments using a sound stimulus and measurement setup. Results: The sensitivity of the DrumMics was found to be tightly clustered across different microphones and ears despite differences in umbo and middle ear anatomy. The DrumMics were shown to behave linearly across a large dynamic range (46 dB SPL to 100 dB SPL) across a wide bandwidth (100 Hz to 8 kHz). The equivalent input noise (0.1-10 kHz) of the DrumMic and amplifier referenced to the ear canal was measured to be 54 dB SPL and estimated to be 46 dB SPL after accounting for the pressure gain of the outer ear. Conclusion: The results demonstrate that the DrumMic behaves robustly across ears and fabrication. The equivalent input noise performance was shown to approach that of commercial hearing aid microphones. To advance this demonstration of the DrumMic concept to a future prototype implantable in humans, work on encapsulation, biocompatibility, connectorization will be required.
ReLU-QP: A GPU-Accelerated Quadratic Programming Solver for Model-Predictive Control
Nov 29, 2023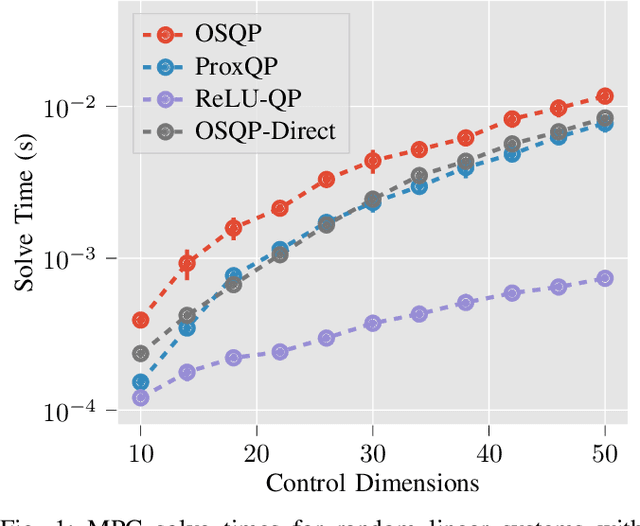
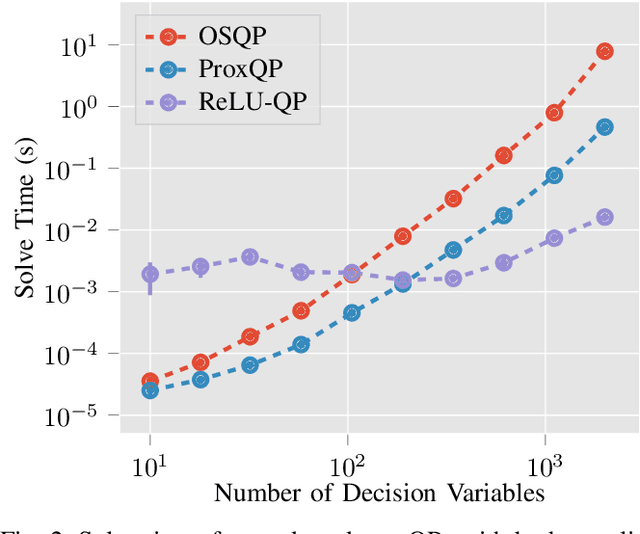
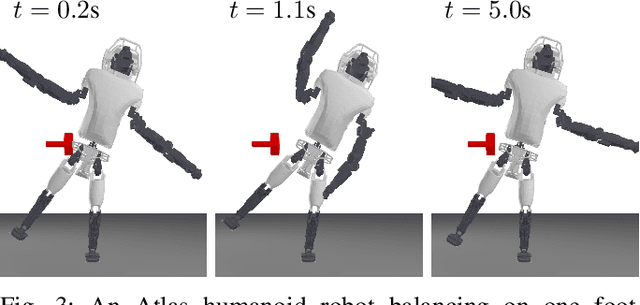
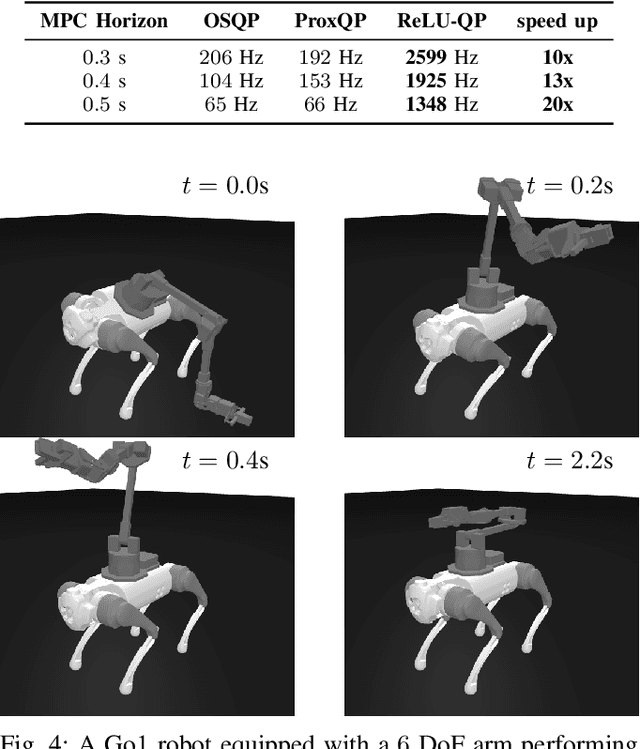
We present ReLU-QP, a GPU-accelerated solver for quadratic programs (QPs) that is capable of solving high-dimensional control problems at real-time rates. ReLU-QP is derived by exactly reformulating the Alternating Direction Method of Multipliers (ADMM) algorithm for solving QPs as a deep, weight-tied neural network with rectified linear unit (ReLU) activations. This reformulation enables the deployment of ReLU-QP on GPUs using standard machine-learning toolboxes. We evaluate the performance of ReLU-QP across three model-predictive control (MPC) benchmarks: stabilizing random linear dynamical systems with control limits, balancing an Atlas humanoid robot on a single foot, and tracking whole-body reference trajectories on a quadruped equipped with a six-degree-of-freedom arm. These benchmarks indicate that ReLU-QP is competitive with state-of-the-art CPU-based solvers for small-to-medium-scale problems and offers order-of-magnitude speed improvements for larger-scale problems.