 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMOSAIC: Modular Scalable Autonomy for Intelligent Coordination of Heterogeneous Robotic Teams
Jan 30, 2026Mobile robots have become indispensable for exploring hostile environments, such as in space or disaster relief scenarios, but often remain limited to teleoperation by a human operator. This restricts the deployment scale and requires near-continuous low-latency communication between the operator and the robot. We present MOSAIC: a scalable autonomy framework for multi-robot scientific exploration using a unified mission abstraction based on Points of Interest (POIs) and multiple layers of autonomy, enabling supervision by a single operator. The framework dynamically allocates exploration and measurement tasks based on each robot's capabilities, leveraging team-level redundancy and specialization to enable continuous operation. We validated the framework in a space-analog field experiment emulating a lunar prospecting scenario, involving a heterogeneous team of five robots and a single operator. Despite the complete failure of one robot during the mission, the team completed 82.3% of assigned tasks at an Autonomy Ratio of 86%, while the operator workload remained at only 78.2%. These results demonstrate that the proposed framework enables robust, scalable multi-robot scientific exploration with limited operator intervention. We further derive practical lessons learned in robot interoperability, networking architecture, team composition, and operator workload management to inform future multi-robot exploration missions.
A Practical Framework of Key Performance Indicators for Multi-Robot Lunar and Planetary Field Tests
Jan 28, 2026Robotic prospecting for critical resources on the Moon, such as ilmenite, rare earth elements, and water ice, requires robust exploration methods given the diverse terrain and harsh environmental conditions. Although numerous analog field trials address these goals, comparing their results remains challenging because of differences in robot platforms and experimental setups. These missions typically assess performance using selected, scenario-specific engineering metrics that fail to establish a clear link between field performance and science-driven objectives. In this paper, we address this gap by deriving a structured framework of KPI from three realistic multi-robot lunar scenarios reflecting scientific objectives and operational constraints. Our framework emphasizes scenario-dependent priorities in efficiency, robustness, and precision, and is explicitly designed for practical applicability in field deployments. We validated the framework in a multi-robot field test and found it practical and easy to apply for efficiency- and robustness-related KPI, whereas precision-oriented KPI require reliable ground-truth data that is not always feasible to obtain in outdoor analog environments. Overall, we propose this framework as a common evaluation standard enabling consistent, goal-oriented comparison of multi-robot field trials and supporting systematic development of robotic systems for future planetary exploration.
Magnecko: Design and Control of a Quadrupedal Magnetic Climbing Robot
Apr 18, 2025Climbing robots hold significant promise for applications such as industrial inspection and maintenance, particularly in hazardous or hard-to-reach environments. This paper describes the quadrupedal climbing robot Magnecko, developed with the major goal of providing a research platform for legged climbing locomotion. With its 12 actuated degrees of freedom arranged in an insect-style joint configuration, Magnecko's high manipulability and high range of motion allow it to handle challenging environments like overcoming concave 90 degree corners. A model predictive controller enables Magnecko to crawl on the ground on horizontal overhangs and on vertical walls. Thanks to the custom actuators and the electro-permanent magnets that are used for adhesion on ferrous surfaces, the system is powerful enough to carry additional payloads of at least 65 percent of its own weight in all orientations. The Magnecko platform serves as a foundation for climbing locomotion in complex three-dimensional environments.
Perceptive Pedipulation with Local Obstacle Avoidance
Sep 11, 2024



Pedipulation leverages the feet of legged robots for mobile manipulation, eliminating the need for dedicated robotic arms. While previous works have showcased blind and task-specific pedipulation skills, they fail to account for static and dynamic obstacles in the environment. To address this limitation, we introduce a reinforcement learning-based approach to train a whole-body obstacle-aware policy that tracks foot position commands while simultaneously avoiding obstacles. Despite training the policy in only five different static scenarios in simulation, we show that it generalizes to unknown environments with different numbers and types of obstacles. We analyze the performance of our method through a set of simulation experiments and successfully deploy the learned policy on the ANYmal quadruped, demonstrating its capability to follow foot commands while navigating around static and dynamic obstacles.
SpaceHopper: A Small-Scale Legged Robot for Exploring Low-Gravity Celestial Bodies
Mar 05, 2024



We present SpaceHopper, a three-legged, small-scale robot designed for future mobile exploration of asteroids and moons. The robot weighs 5.2kg and has a body size of 245mm while using space-qualifiable components. Furthermore, SpaceHopper's design and controls make it well-adapted for investigating dynamic locomotion modes with extended flight-phases. Instead of gyroscopes or fly-wheels, the system uses its three legs to reorient the body during flight in preparation for landing. We control the leg motion for reorientation using Deep Reinforcement Learning policies. In a simulation of Ceres' gravity (0.029g), the robot can reliably jump to commanded positions up to 6m away. Our real-world experiments show that SpaceHopper can successfully reorient to a safe landing orientation within 9.7 degree inside a rotational gimbal and jump in a counterweight setup in Earth's gravity. Overall, we consider SpaceHopper an important step towards controlled jumping locomotion in low-gravity environments.
Pedipulate: Enabling Manipulation Skills using a Quadruped Robot's Leg
Feb 16, 2024



Legged robots have the potential to become vital in maintenance, home support, and exploration scenarios. In order to interact with and manipulate their environments, most legged robots are equipped with a dedicated robot arm, which means additional mass and mechanical complexity compared to standard legged robots. In this work, we explore pedipulation - using the legs of a legged robot for manipulation. By training a reinforcement learning policy that tracks position targets for one foot, we enable a dedicated pedipulation controller that is robust to disturbances, has a large workspace through whole-body behaviors, and can reach far-away targets with gait emergence, enabling loco-pedipulation. By deploying our controller on a quadrupedal robot using teleoperation, we demonstrate various real-world tasks such as door opening, sample collection, and pushing obstacles. We demonstrate load carrying of more than 2.0 kg at the foot. Additionally, the controller is robust to interaction forces at the foot, disturbances at the base, and slippery contact surfaces. Videos of the experiments are available at https://sites.google.com/leggedrobotics.com/pedipulate.
Scientific Exploration of Challenging Planetary Analog Environments with a Team of Legged Robots
Jul 19, 2023The interest in exploring planetary bodies for scientific investigation and in-situ resource utilization is ever-rising. Yet, many sites of interest are inaccessible to state-of-the-art planetary exploration robots because of the robots' inability to traverse steep slopes, unstructured terrain, and loose soil. Additionally, current single-robot approaches only allow a limited exploration speed and a single set of skills. Here, we present a team of legged robots with complementary skills for exploration missions in challenging planetary analog environments. We equipped the robots with an efficient locomotion controller, a mapping pipeline for online and post-mission visualization, instance segmentation to highlight scientific targets, and scientific instruments for remote and in-situ investigation. Furthermore, we integrated a robotic arm on one of the robots to enable high-precision measurements. Legged robots can swiftly navigate representative terrains, such as granular slopes beyond 25 degrees, loose soil, and unstructured terrain, highlighting their advantages compared to wheeled rover systems. We successfully verified the approach in analog deployments at the BeyondGravity ExoMars rover testbed, in a quarry in Switzerland, and at the Space Resources Challenge in Luxembourg. Our results show that a team of legged robots with advanced locomotion, perception, and measurement skills, as well as task-level autonomy, can conduct successful, effective missions in a short time. Our approach enables the scientific exploration of planetary target sites that are currently out of human and robotic reach.
SMUG Planner: A Safe Multi-Goal Planner for Mobile Robots in Challenging Environments
Jun 08, 2023



Robotic exploration or monitoring missions require mobile robots to autonomously and safely navigate between multiple target locations in potentially challenging environments. Currently, this type of multi-goal mission often relies on humans designing a set of actions for the robot to follow in the form of a path or waypoints. In this work, we consider the multi-goal problem of visiting a set of pre-defined targets, each of which could be visited from multiple potential locations. To increase autonomy in these missions, we propose a safe multi-goal (SMUG) planner that generates an optimal motion path to visit those targets. To increase safety and efficiency, we propose a hierarchical state validity checking scheme, which leverages robot-specific traversability learned in simulation. We use LazyPRM* with an informed sampler to accelerate collision-free path generation. Our iterative dynamic programming algorithm enables the planner to generate a path visiting more than ten targets within seconds. Moreover, the proposed hierarchical state validity checking scheme reduces the planning time by 30% compared to pure volumetric collision checking and increases safety by avoiding high-risk regions. We deploy the SMUG planner on the quadruped robot ANYmal and show its capability to guide the robot in multi-goal missions fully autonomously on rough terrain.
Learning-based Design and Control for Quadrupedal Robots with Parallel-Elastic Actuators
Jan 09, 2023



Parallel-elastic joints can improve the efficiency and strength of robots by assisting the actuators with additional torques. For these benefits to be realized, a spring needs to be carefully designed. However, designing robots is an iterative and tedious process, often relying on intuition and heuristics. We introduce a design optimization framework that allows us to co-optimize a parallel elastic knee joint and locomotion controller for quadrupedal robots with minimal human intuition. We design a parallel elastic joint and optimize its parameters with respect to the efficiency in a model-free fashion. In the first step, we train a design-conditioned policy using model-free Reinforcement Learning, capable of controlling the quadruped in the predefined range of design parameters. Afterwards, we use Bayesian Optimization to find the best design using the policy. We use this framework to optimize the parallel-elastic spring parameters for the knee of our quadrupedal robot ANYmal together with the optimal controller. We evaluate the optimized design and controller in real-world experiments over various terrains. Our results show that the new system improves the torque-square efficiency of the robot by 33% compared to the baseline and reduces maximum joint torque by 30% without compromising tracking performance. The improved design resulted in 11% longer operation time on flat terrain.
Learning Material Parameters and Hydrodynamics of Soft Robotic Fish via Differentiable Simulation
Sep 30, 2021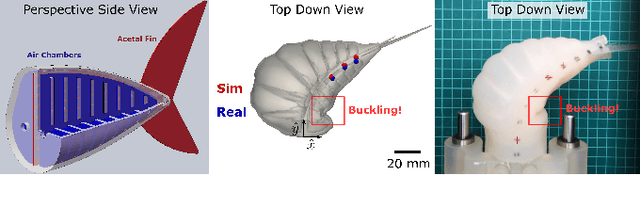
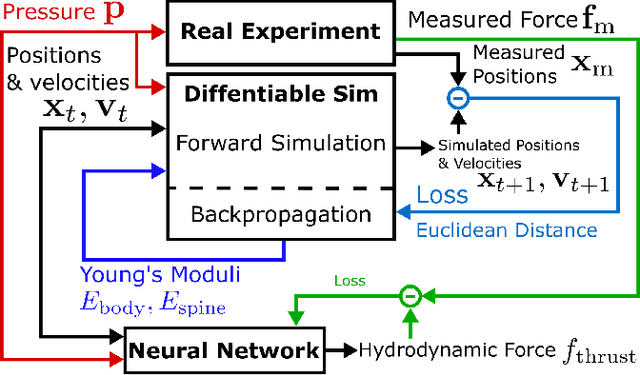
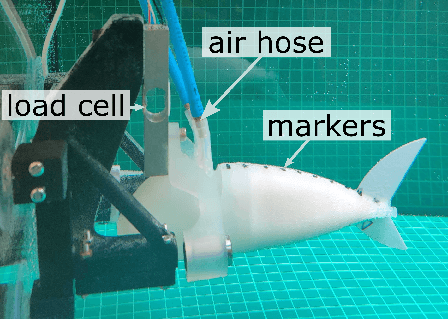
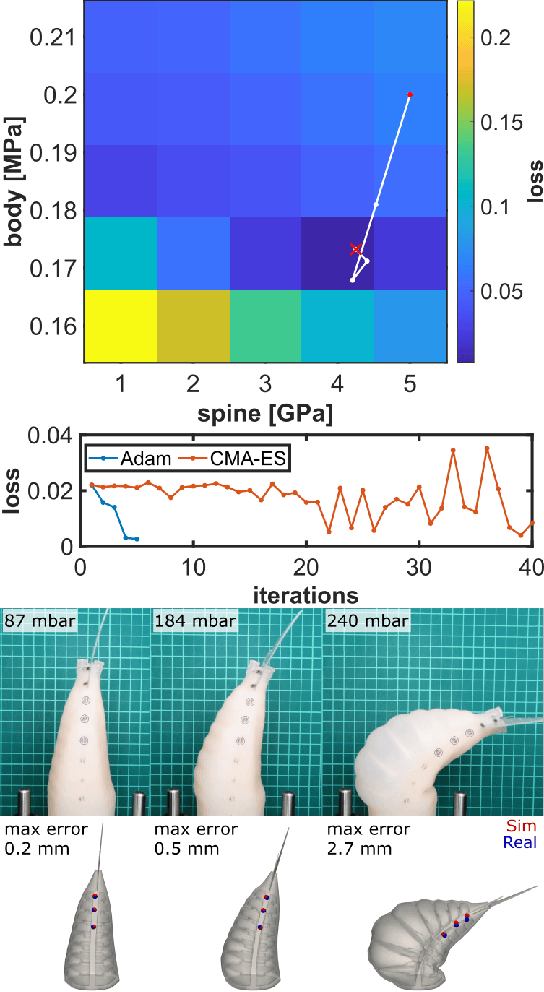
The high dimensionality of soft mechanisms and the complex physics of fluid-structure interactions render the sim2real gap for soft robots particularly challenging. Our framework allows high fidelity prediction of dynamic behavior for composite bi-morph bending structures in real hardware to accuracy near measurement uncertainty. We address this gap with our differentiable simulation tool by learning the material parameters and hydrodynamics of our robots. We demonstrate an experimentally-verified, fast optimization pipeline for learning the material parameters and hydrodynamics from quasi-static and dynamic data via differentiable simulation. Our method identifies physically plausible Young's moduli for various soft silicone elastomers and stiff acetal copolymers used in creation of our three different fish robot designs. For these robots we provide a differentiable and more robust estimate of the thrust force than analytical models and we successfully predict deformation to millimeter accuracy in dynamic experiments under various actuation signals. Although we focus on a specific application for underwater soft robots, our framework is applicable to any pneumatically actuated soft mechanism. This work presents a prototypical hardware and simulation problem solved using our framework that can be extended straightforwardly to higher dimensional parameter inference, learning control policies, and computational design enabled by its differentiability.