 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScientific Exploration of Challenging Planetary Analog Environments with a Team of Legged Robots
Jul 19, 2023The interest in exploring planetary bodies for scientific investigation and in-situ resource utilization is ever-rising. Yet, many sites of interest are inaccessible to state-of-the-art planetary exploration robots because of the robots' inability to traverse steep slopes, unstructured terrain, and loose soil. Additionally, current single-robot approaches only allow a limited exploration speed and a single set of skills. Here, we present a team of legged robots with complementary skills for exploration missions in challenging planetary analog environments. We equipped the robots with an efficient locomotion controller, a mapping pipeline for online and post-mission visualization, instance segmentation to highlight scientific targets, and scientific instruments for remote and in-situ investigation. Furthermore, we integrated a robotic arm on one of the robots to enable high-precision measurements. Legged robots can swiftly navigate representative terrains, such as granular slopes beyond 25 degrees, loose soil, and unstructured terrain, highlighting their advantages compared to wheeled rover systems. We successfully verified the approach in analog deployments at the BeyondGravity ExoMars rover testbed, in a quarry in Switzerland, and at the Space Resources Challenge in Luxembourg. Our results show that a team of legged robots with advanced locomotion, perception, and measurement skills, as well as task-level autonomy, can conduct successful, effective missions in a short time. Our approach enables the scientific exploration of planetary target sites that are currently out of human and robotic reach.
Whole-Body MPC and Dynamic Occlusion Avoidance: A Maximum Likelihood Visibility Approach
Mar 04, 2022
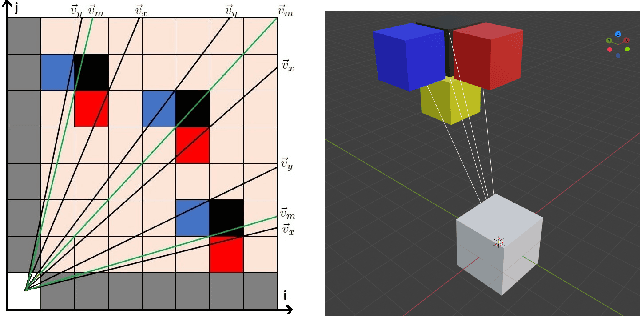
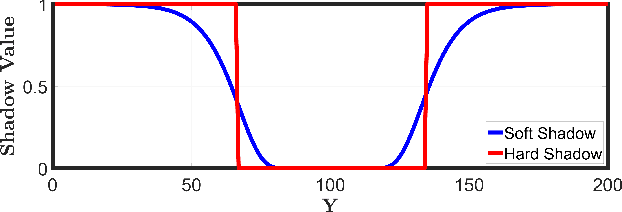
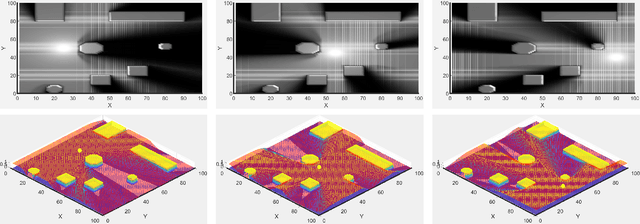
This paper introduces a novel approach for whole-body motion planning and dynamic occlusion avoidance. The proposed approach reformulates the visibility constraint as a likelihood maximization of visibility probability. In this formulation, we augment the primary cost function of a whole-body model predictive control scheme through a relaxed log barrier function yielding a relaxed log-likelihood maximization formulation of visibility probability. The visibility probability is computed through a probabilistic shadow field that quantifies point light source occlusions. We provide the necessary algorithms to obtain such a field for both 2D and 3D cases. We demonstrate 2D implementations of this field in simulation and 3D implementations through real-time hardware experiments. We show that due to the linear complexity of our shadow field algorithm to the map size, we can achieve high update rates, which facilitates onboard execution on mobile platforms with limited computational power. Lastly, we evaluate the performance of the proposed MPC reformulation in simulation for a quadrupedal mobile manipulator.