 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLarge-Scale Autonomous Gas Monitoring for Volcanic Environments: A Legged Robot on Mount Etna
Jan 12, 2026Volcanic gas emissions are key precursors of eruptive activity. Yet, obtaining accurate near-surface measurements remains hazardous and logistically challenging, motivating the need for autonomous solutions. Limited mobility in rough volcanic terrain has prevented wheeled systems from performing reliable in situ gas measurements, reducing their usefulness as sensing platforms. We present a legged robotic system for autonomous volcanic gas analysis, utilizing the quadruped ANYmal, equipped with a quadrupole mass spectrometer system. Our modular autonomy stack integrates a mission planning interface, global planner, localization framework, and terrain-aware local navigation. We evaluated the system on Mount Etna across three autonomous missions in varied terrain, achieving successful gas-source detections with autonomy rates of 93-100%. In addition, we conducted a teleoperated mission in which the robot measured natural fumaroles, detecting sulfur dioxide and carbon dioxide. We discuss lessons learned from the gas-analysis and autonomy perspectives, emphasizing the need for adaptive sensing strategies, tighter integration of global and local planning, and improved hardware design.
Motion Priors Reimagined: Adapting Flat-Terrain Skills for Complex Quadruped Mobility
May 21, 2025



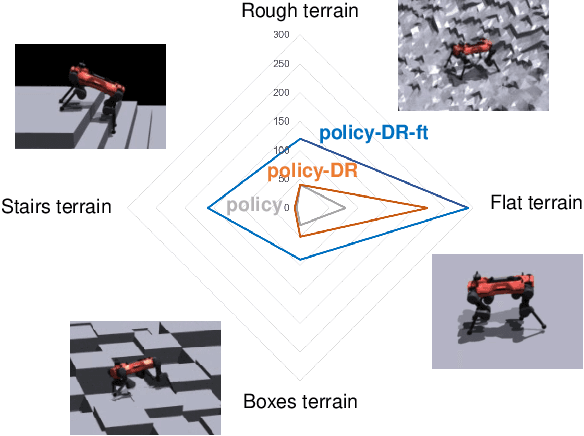
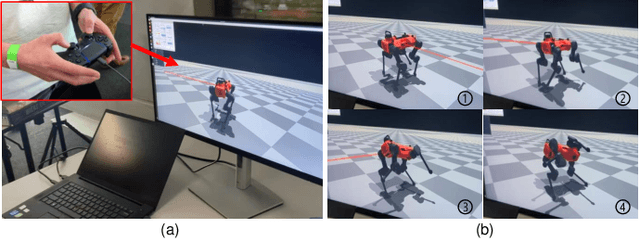
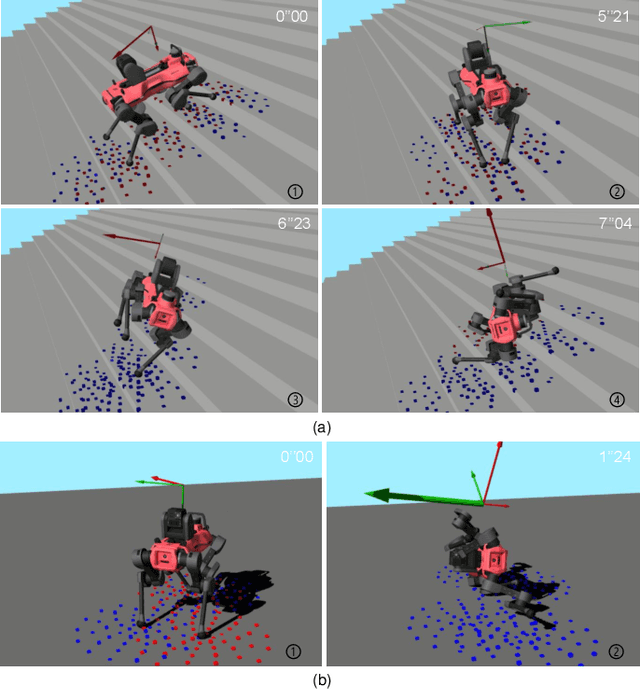
Reinforcement learning (RL)-based legged locomotion controllers often require meticulous reward tuning to track velocities or goal positions while preserving smooth motion on various terrains. Motion imitation methods via RL using demonstration data reduce reward engineering but fail to generalize to novel environments. We address this by proposing a hierarchical RL framework in which a low-level policy is first pre-trained to imitate animal motions on flat ground, thereby establishing motion priors. A subsequent high-level, goal-conditioned policy then builds on these priors, learning residual corrections that enable perceptive locomotion, local obstacle avoidance, and goal-directed navigation across diverse and rugged terrains. Simulation experiments illustrate the effectiveness of learned residuals in adapting to progressively challenging uneven terrains while still preserving the locomotion characteristics provided by the motion priors. Furthermore, our results demonstrate improvements in motion regularization over baseline models trained without motion priors under similar reward setups. Real-world experiments with an ANYmal-D quadruped robot confirm our policy's capability to generalize animal-like locomotion skills to complex terrains, demonstrating smooth and efficient locomotion and local navigation performance amidst challenging terrains with obstacles.
DAPPER: Discriminability-Aware Policy-to-Policy Preference-Based Reinforcement Learning for Query-Efficient Robot Skill Acquisition
May 09, 2025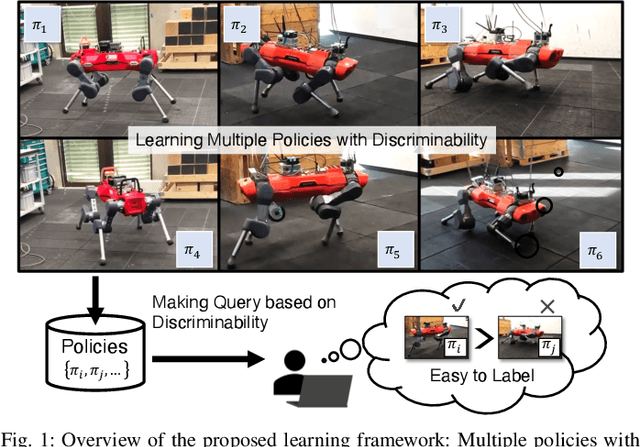
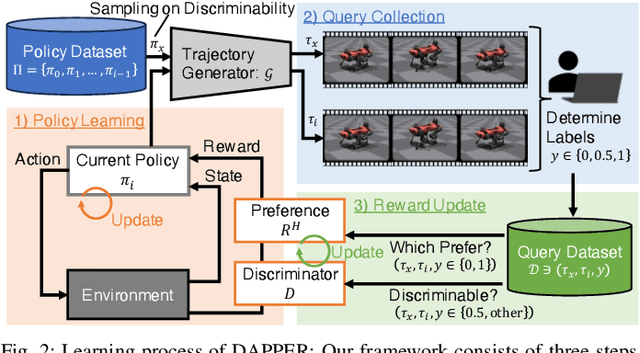
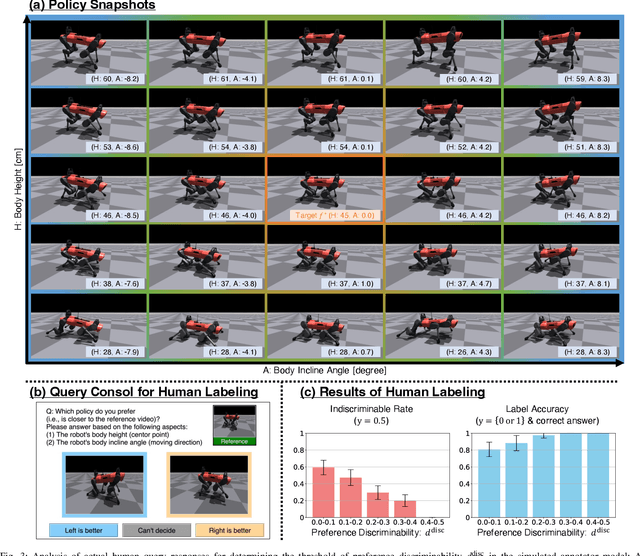
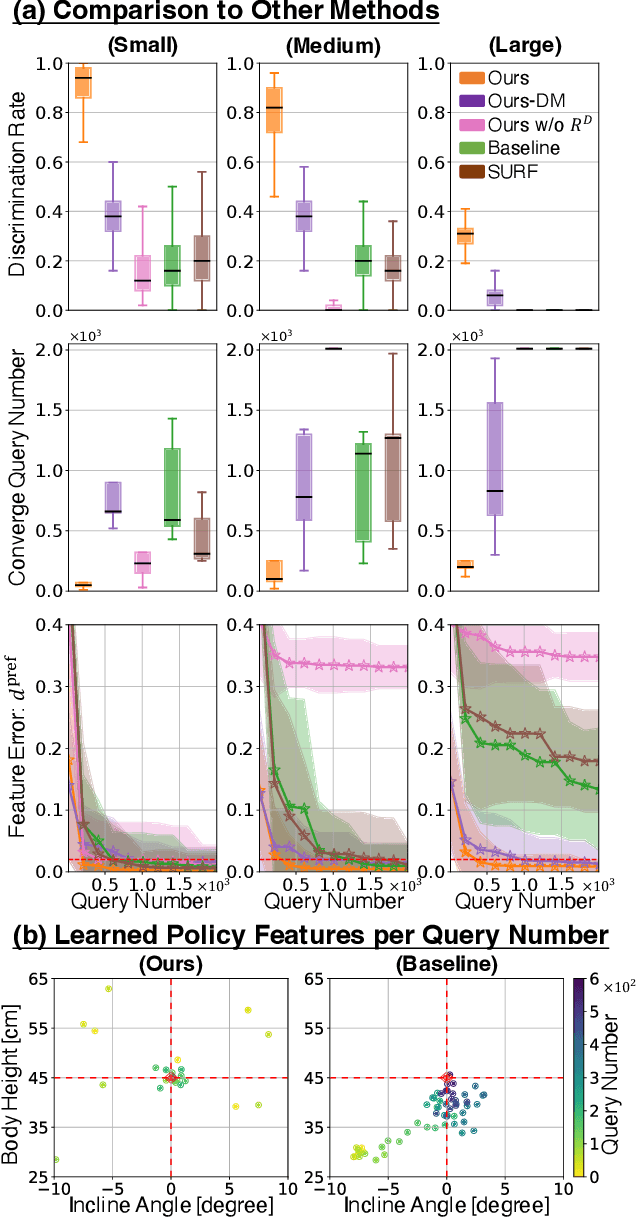
Preference-based Reinforcement Learning (PbRL) enables policy learning through simple queries comparing trajectories from a single policy. While human responses to these queries make it possible to learn policies aligned with human preferences, PbRL suffers from low query efficiency, as policy bias limits trajectory diversity and reduces the number of discriminable queries available for learning preferences. This paper identifies preference discriminability, which quantifies how easily a human can judge which trajectory is closer to their ideal behavior, as a key metric for improving query efficiency. To address this, we move beyond comparisons within a single policy and instead generate queries by comparing trajectories from multiple policies, as training them from scratch promotes diversity without policy bias. We propose Discriminability-Aware Policy-to-Policy Preference-Based Efficient Reinforcement Learning (DAPPER), which integrates preference discriminability with trajectory diversification achieved by multiple policies. DAPPER trains new policies from scratch after each reward update and employs a discriminator that learns to estimate preference discriminability, enabling the prioritized sampling of more discriminable queries. During training, it jointly maximizes the preference reward and preference discriminability score, encouraging the discovery of highly rewarding and easily distinguishable policies. Experiments in simulated and real-world legged robot environments demonstrate that DAPPER outperforms previous methods in query efficiency, particularly under challenging preference discriminability conditions.
Learning to Open and Traverse Doors with a Legged Manipulator
Sep 07, 2024



Using doors is a longstanding challenge in robotics and is of significant practical interest in giving robots greater access to human-centric spaces. The task is challenging due to the need for online adaptation to varying door properties and precise control in manipulating the door panel and navigating through the confined doorway. To address this, we propose a learning-based controller for a legged manipulator to open and traverse through doors. The controller is trained using a teacher-student approach in simulation to learn robust task behaviors as well as estimate crucial door properties during the interaction. Unlike previous works, our approach is a single control policy that can handle both push and pull doors through learned behaviour which infers the opening direction during deployment without prior knowledge. The policy was deployed on the ANYmal legged robot with an arm and achieved a success rate of 95.0% in repeated trials conducted in an experimental setting. Additional experiments validate the policy's effectiveness and robustness to various doors and disturbances. A video overview of the method and experiments can be found at youtu.be/tQDZXN_k5NU.
Identifying Terrain Physical Parameters from Vision -- Towards Physical-Parameter-Aware Locomotion and Navigation
Aug 29, 2024



Identifying the physical properties of the surrounding environment is essential for robotic locomotion and navigation to deal with non-geometric hazards, such as slippery and deformable terrains. It would be of great benefit for robots to anticipate these extreme physical properties before contact; however, estimating environmental physical parameters from vision is still an open challenge. Animals can achieve this by using their prior experience and knowledge of what they have seen and how it felt. In this work, we propose a cross-modal self-supervised learning framework for vision-based environmental physical parameter estimation, which paves the way for future physical-property-aware locomotion and navigation. We bridge the gap between existing policies trained in simulation and identification of physical terrain parameters from vision. We propose to train a physical decoder in simulation to predict friction and stiffness from multi-modal input. The trained network allows the labeling of real-world images with physical parameters in a self-supervised manner to further train a visual network during deployment, which can densely predict the friction and stiffness from image data. We validate our physical decoder in simulation and the real world using a quadruped ANYmal robot, outperforming an existing baseline method. We show that our visual network can predict the physical properties in indoor and outdoor experiments while allowing fast adaptation to new environments.
Dataset and Lessons Learned from the 2024 SaTML LLM Capture-the-Flag Competition
Jun 12, 2024



Large language model systems face important security risks from maliciously crafted messages that aim to overwrite the system's original instructions or leak private data. To study this problem, we organized a capture-the-flag competition at IEEE SaTML 2024, where the flag is a secret string in the LLM system prompt. The competition was organized in two phases. In the first phase, teams developed defenses to prevent the model from leaking the secret. During the second phase, teams were challenged to extract the secrets hidden for defenses proposed by the other teams. This report summarizes the main insights from the competition. Notably, we found that all defenses were bypassed at least once, highlighting the difficulty of designing a successful defense and the necessity for additional research to protect LLM systems. To foster future research in this direction, we compiled a dataset with over 137k multi-turn attack chats and open-sourced the platform.
Rethinking Robustness Assessment: Adversarial Attacks on Learning-based Quadrupedal Locomotion Controllers
May 21, 2024
Legged locomotion has recently achieved remarkable success with the progress of machine learning techniques, especially deep reinforcement learning (RL). Controllers employing neural networks have demonstrated empirical and qualitative robustness against real-world uncertainties, including sensor noise and external perturbations. However, formally investigating the vulnerabilities of these locomotion controllers remains a challenge. This difficulty arises from the requirement to pinpoint vulnerabilities across a long-tailed distribution within a high-dimensional, temporally sequential space. As a first step towards quantitative verification, we propose a computational method that leverages sequential adversarial attacks to identify weaknesses in learned locomotion controllers. Our research demonstrates that, even state-of-the-art robust controllers can fail significantly under well-designed, low-magnitude adversarial sequence. Through experiments in simulation and on the real robot, we validate our approach's effectiveness, and we illustrate how the results it generates can be used to robustify the original policy and offer valuable insights into the safety of these black-box policies.
Learning Robust Autonomous Navigation and Locomotion for Wheeled-Legged Robots
May 03, 2024Autonomous wheeled-legged robots have the potential to transform logistics systems, improving operational efficiency and adaptability in urban environments. Navigating urban environments, however, poses unique challenges for robots, necessitating innovative solutions for locomotion and navigation. These challenges include the need for adaptive locomotion across varied terrains and the ability to navigate efficiently around complex dynamic obstacles. This work introduces a fully integrated system comprising adaptive locomotion control, mobility-aware local navigation planning, and large-scale path planning within the city. Using model-free reinforcement learning (RL) techniques and privileged learning, we develop a versatile locomotion controller. This controller achieves efficient and robust locomotion over various rough terrains, facilitated by smooth transitions between walking and driving modes. It is tightly integrated with a learned navigation controller through a hierarchical RL framework, enabling effective navigation through challenging terrain and various obstacles at high speed. Our controllers are integrated into a large-scale urban navigation system and validated by autonomous, kilometer-scale navigation missions conducted in Zurich, Switzerland, and Seville, Spain. These missions demonstrate the system's robustness and adaptability, underscoring the importance of integrated control systems in achieving seamless navigation in complex environments. Our findings support the feasibility of wheeled-legged robots and hierarchical RL for autonomous navigation, with implications for last-mile delivery and beyond.
Learning to walk in confined spaces using 3D representation
Feb 29, 2024
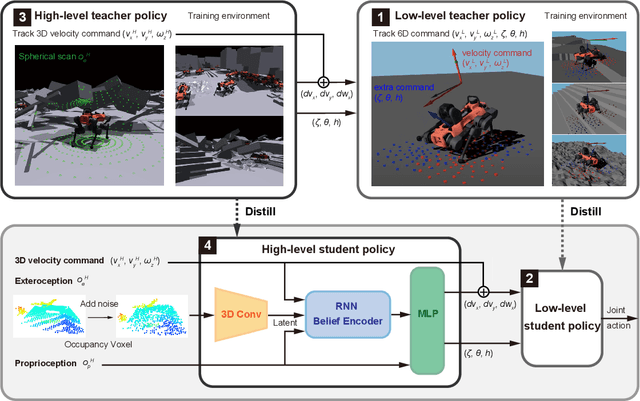
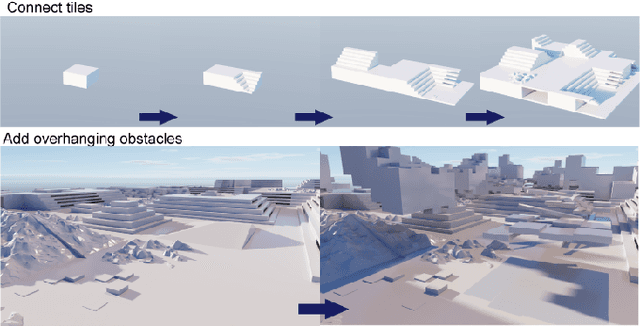
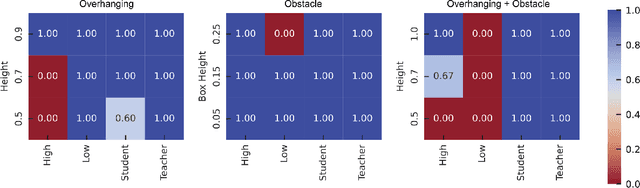
Legged robots have the potential to traverse complex terrain and access confined spaces beyond the reach of traditional platforms thanks to their ability to carefully select footholds and flexibly adapt their body posture while walking. However, robust deployment in real-world applications is still an open challenge. In this paper, we present a method for legged locomotion control using reinforcement learning and 3D volumetric representations to enable robust and versatile locomotion in confined and unstructured environments. By employing a two-layer hierarchical policy structure, we exploit the capabilities of a highly robust low-level policy to follow 6D commands and a high-level policy to enable three-dimensional spatial awareness for navigating under overhanging obstacles. Our study includes the development of a procedural terrain generator to create diverse training environments. We present a series of experimental evaluations in both simulation and real-world settings, demonstrating the effectiveness of our approach in controlling a quadruped robot in confined, rough terrain. By achieving this, our work extends the applicability of legged robots to a broader range of scenarios.
MEM: Multi-Modal Elevation Mapping for Robotics and Learning
Sep 28, 2023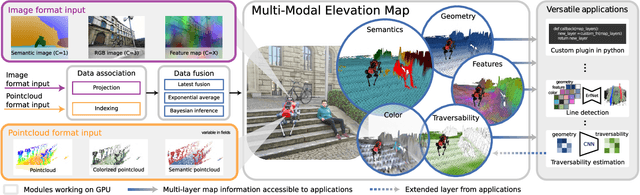
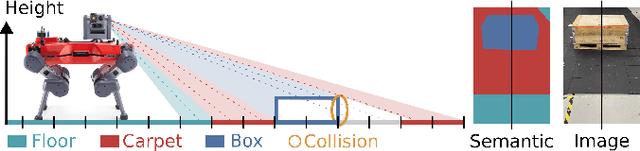

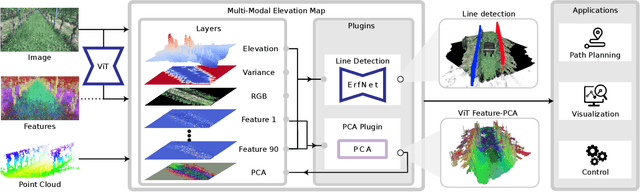
Elevation maps are commonly used to represent the environment of mobile robots and are instrumental for locomotion and navigation tasks. However, pure geometric information is insufficient for many field applications that require appearance or semantic information, which limits their applicability to other platforms or domains. In this work, we extend a 2.5D robot-centric elevation mapping framework by fusing multi-modal information from multiple sources into a popular map representation. The framework allows inputting data contained in point clouds or images in a unified manner. To manage the different nature of the data, we also present a set of fusion algorithms that can be selected based on the information type and user requirements. Our system is designed to run on the GPU, making it real-time capable for various robotic and learning tasks. We demonstrate the capabilities of our framework by deploying it on multiple robots with varying sensor configurations and showcasing a range of applications that utilize multi-modal layers, including line detection, human detection, and colorization.