 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Finite-State Controller Based Offline Solver for Deterministic POMDPs
May 01, 2025



Deterministic partially observable Markov decision processes (DetPOMDPs) often arise in planning problems where the agent is uncertain about its environmental state but can act and observe deterministically. In this paper, we propose DetMCVI, an adaptation of the Monte Carlo Value Iteration (MCVI) algorithm for DetPOMDPs, which builds policies in the form of finite-state controllers (FSCs). DetMCVI solves large problems with a high success rate, outperforming existing baselines for DetPOMDPs. We also verify the performance of the algorithm in a real-world mobile robot forest mapping scenario.
Markerless Aerial-Terrestrial Co-Registration of Forest Point Clouds using a Deformable Pose Graph
Oct 13, 2024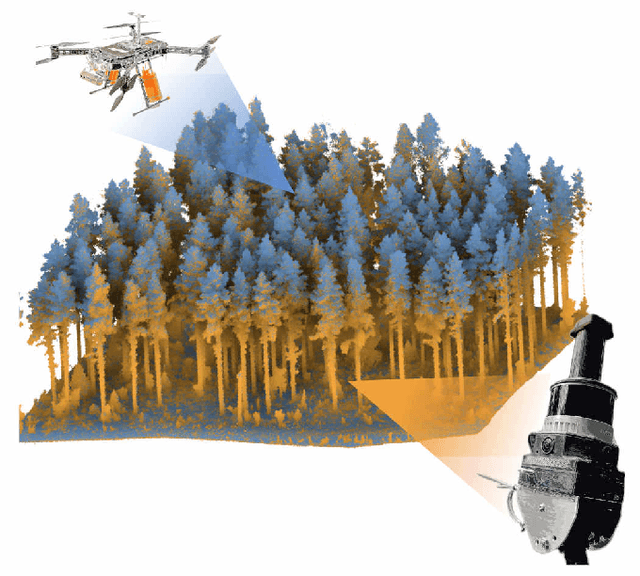
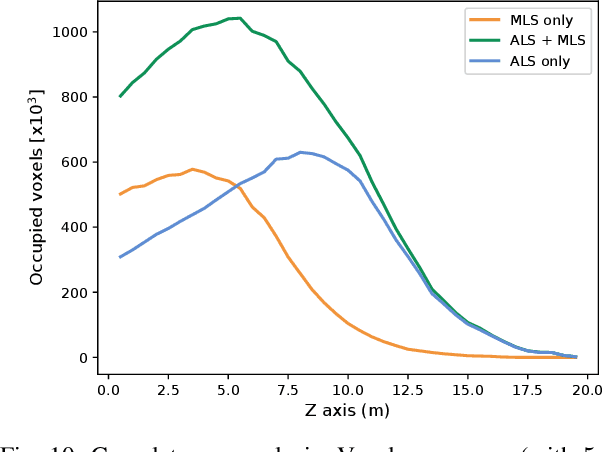
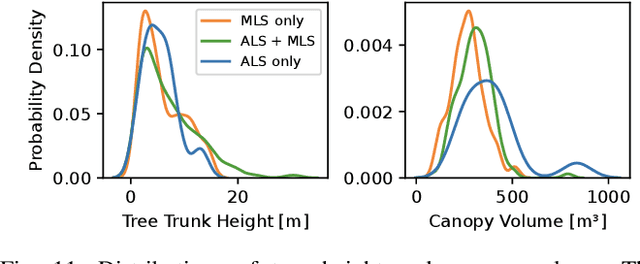
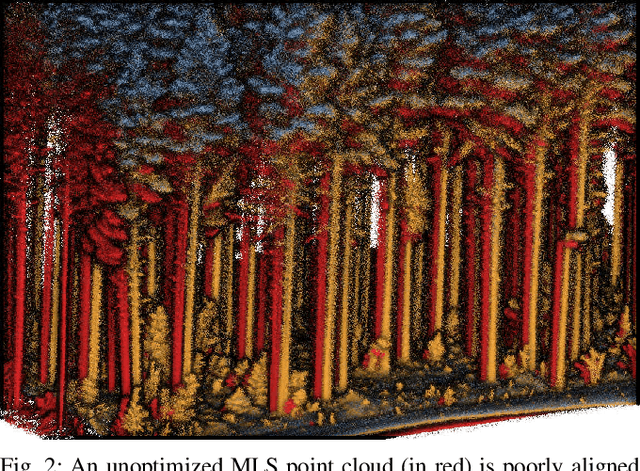
For biodiversity and forestry applications, end-users desire maps of forests that are fully detailed, from the forest floor to the canopy. Terrestrial laser scanning and aerial laser scanning are accurate and increasingly mature methods for scanning the forest. However, individually they are not able to estimate attributes such as tree height, trunk diameter and canopy density due to the inherent differences in their field-of-view and mapping processes. In this work, we present a pipeline that can automatically generate a single joint terrestrial and aerial forest reconstruction. The novelty of the approach is a marker-free registration pipeline, which estimates a set of relative transformation constraints between the aerial cloud and terrestrial sub-clouds without requiring any co-registration reflective markers to be physically placed in the scene. Our method then uses these constraints in a pose graph formulation, which enables us to finely align the respective clouds while respecting spatial constraints introduced by the terrestrial SLAM scanning process. We demonstrate that our approach can produce a fine-grained and complete reconstruction of large-scale natural environments, enabling multi-platform data capture for forestry applications without requiring external infrastructure.
Online Tree Reconstruction and Forest Inventory on a Mobile Robotic System
Mar 26, 2024



Terrestrial laser scanning (TLS) is the standard technique used to create accurate point clouds for digital forest inventories. However, the measurement process is demanding, requiring up to two days per hectare for data collection, significant data storage, as well as resource-heavy post-processing of 3D data. In this work, we present a real-time mapping and analysis system that enables online generation of forest inventories using mobile laser scanners that can be mounted e.g. on mobile robots. Given incrementally created and locally accurate submaps-data payloads-our approach extracts tree candidates using a custom, Voronoi-inspired clustering algorithm. Tree candidates are reconstructed using an adapted Hough algorithm, which enables robust modeling of the tree stem. Further, we explicitly incorporate the incremental nature of the data collection by consistently updating the database using a pose graph LiDAR SLAM system. This enables us to refine our estimates of the tree traits if an area is revisited later during a mission. We demonstrate competitive accuracy to TLS or manual measurements using laser scanners that we mounted on backpacks or mobile robots operating in conifer, broad-leaf and mixed forests. Our results achieve RMSE of 1.93 cm, a bias of 0.65 cm and a standard deviation of 1.81 cm (averaged across these sequences)-with no post-processing required after the mission is complete.
Evaluation and Deployment of LiDAR-based Place Recognition in Dense Forests
Mar 21, 2024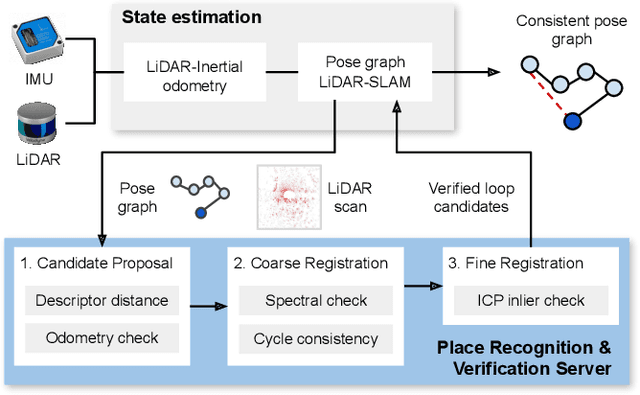
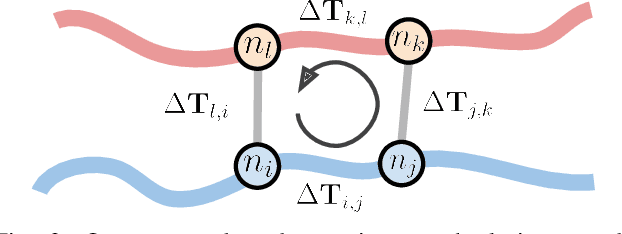
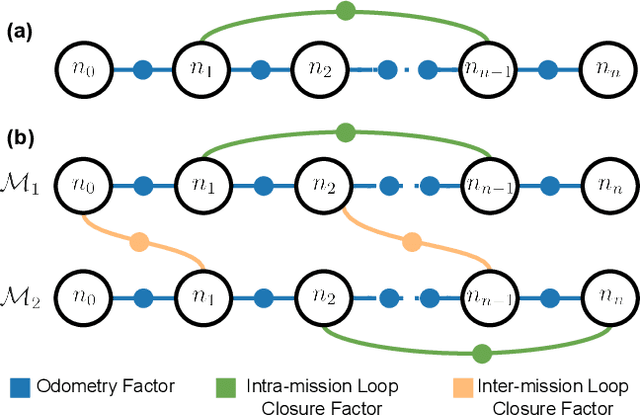
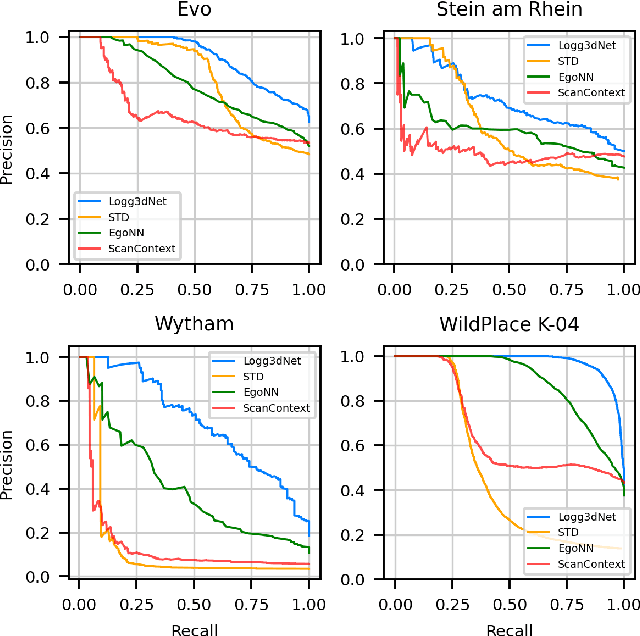
Many LiDAR place recognition systems have been developed and tested specifically for urban driving scenarios. Their performance in natural environments such as forests and woodlands have been studied less closely. In this paper, we analyzed the capabilities of four different LiDAR place recognition systems, both handcrafted and learning-based methods, using LiDAR data collected with a handheld device and legged robot within dense forest environments. In particular, we focused on evaluating localization where there is significant translational and orientation difference between corresponding LiDAR scan pairs. This is particularly important for forest survey systems where the sensor or robot does not follow a defined road or path. Extending our analysis we then incorporated the best performing approach, Logg3dNet, into a full 6-DoF pose estimation system -- introducing several verification layers for precise registration. We demonstrated the performance of our methods in three operational modes: online SLAM, offline multi-mission SLAM map merging, and relocalization into a prior map. We evaluated these modes using data captured in forests from three different countries, achieving 80% of correct loop closures candidates with baseline distances up to 5m, and 60% up to 10m.
Exosense: A Vision-Centric Scene Understanding System For Safe Exoskeleton Navigation
Mar 21, 2024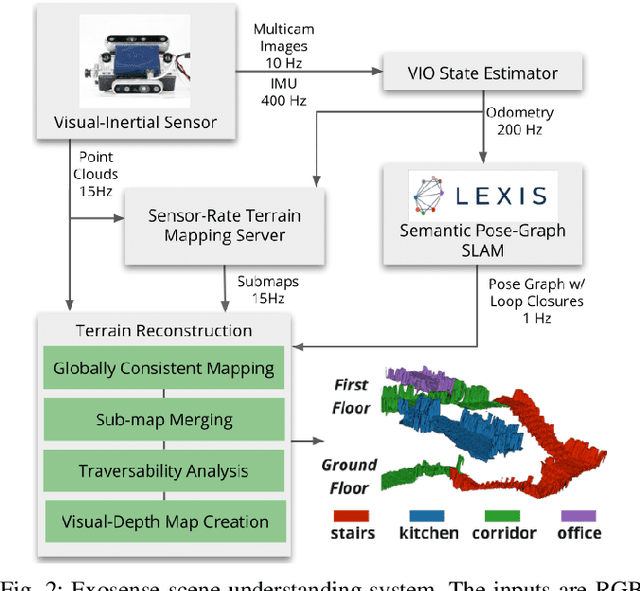
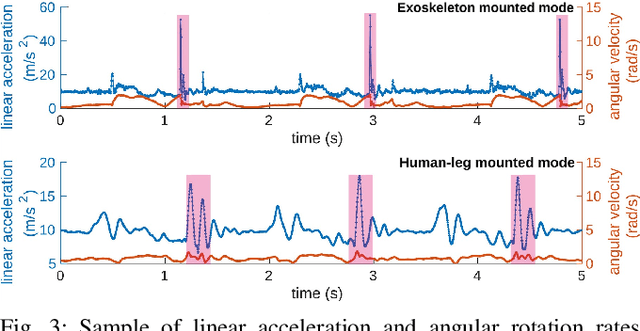
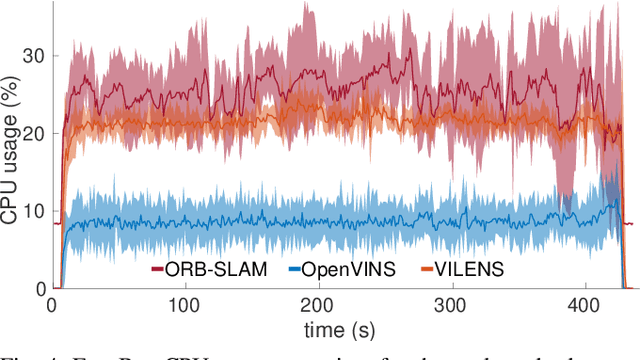
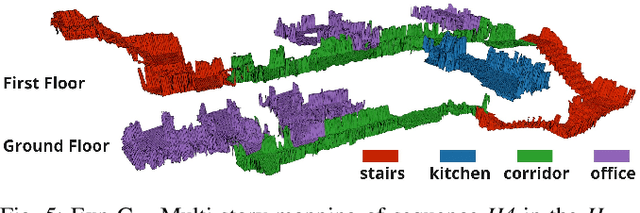
Exoskeletons for daily use by those with mobility impairments are being developed. They will require accurate and robust scene understanding systems. Current research has used vision to identify immediate terrain and geometric obstacles, however these approaches are constrained to detections directly in front of the user and are limited to classifying a finite range of terrain types (e.g., stairs, ramps and level-ground). This paper presents Exosense, a vision-centric scene understanding system which is capable of generating rich, globally-consistent elevation maps, incorporating both semantic and terrain traversability information. It features an elastic Atlas mapping framework associated with a visual SLAM pose graph, embedded with open-vocabulary room labels from a Vision-Language Model (VLM). The device's design includes a wide field-of-view (FoV) fisheye multi-camera system to mitigate the challenges introduced by the exoskeleton walking pattern. We demonstrate the system's robustness to the challenges of typical periodic walking gaits, and its ability to construct accurate semantically-rich maps in indoor settings. Additionally, we showcase its potential for motion planning -- providing a step towards safe navigation for exoskeletons.
SiLVR: Scalable Lidar-Visual Reconstruction with Neural Radiance Fields for Robotic Inspection
Mar 11, 2024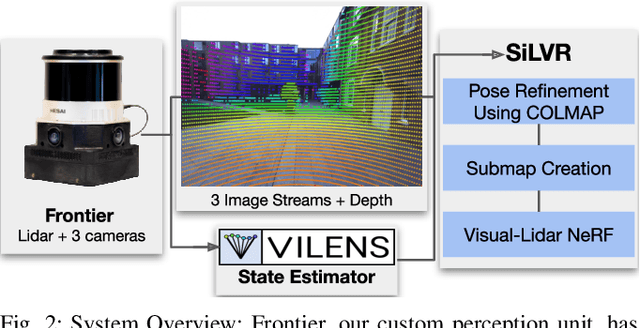
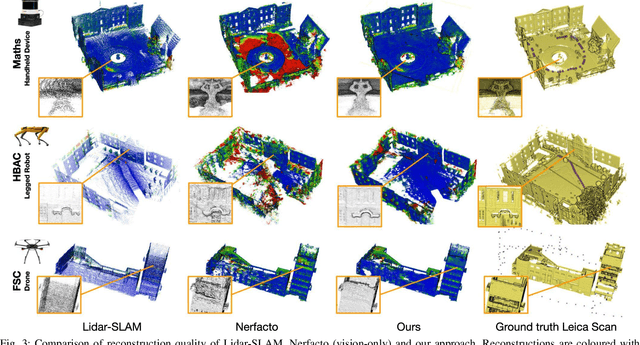
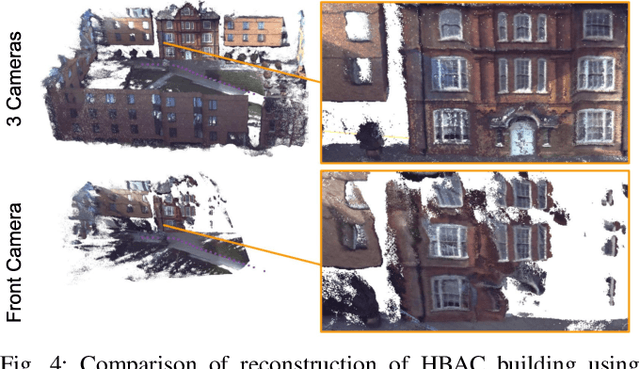
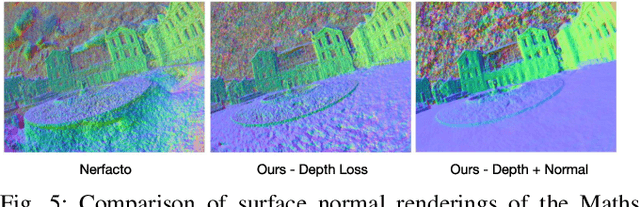
We present a neural-field-based large-scale reconstruction system that fuses lidar and vision data to generate high-quality reconstructions that are geometrically accurate and capture photo-realistic textures. This system adapts the state-of-the-art neural radiance field (NeRF) representation to also incorporate lidar data which adds strong geometric constraints on the depth and surface normals. We exploit the trajectory from a real-time lidar SLAM system to bootstrap a Structure-from-Motion (SfM) procedure to both significantly reduce the computation time and to provide metric scale which is crucial for lidar depth loss. We use submapping to scale the system to large-scale environments captured over long trajectories. We demonstrate the reconstruction system with data from a multi-camera, lidar sensor suite onboard a legged robot, hand-held while scanning building scenes for 600 metres, and onboard an aerial robot surveying a multi-storey mock disaster site-building. Website: https://ori-drs.github.io/projects/silvr/
Resilient Legged Local Navigation: Learning to Traverse with Compromised Perception End-to-End
Oct 05, 2023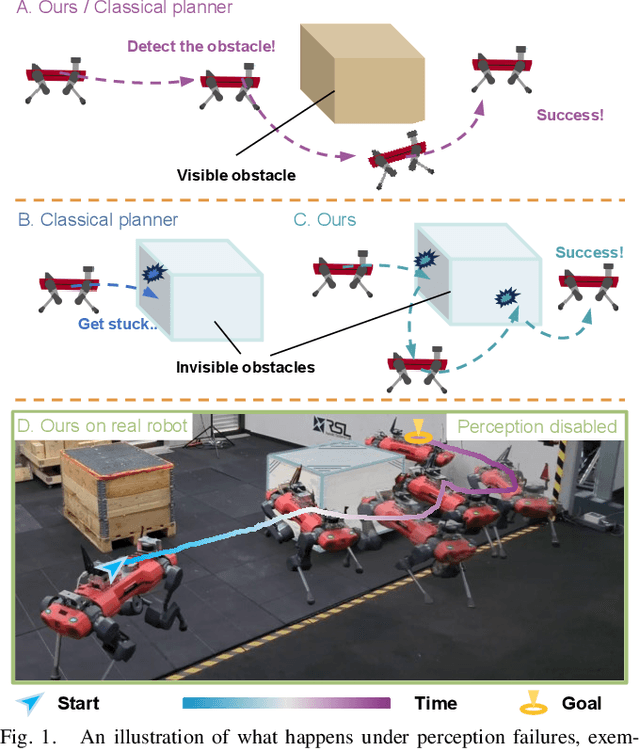

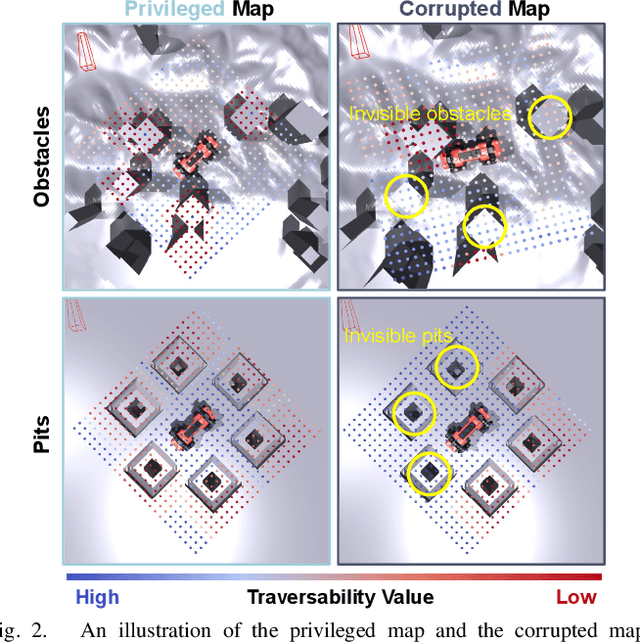

Autonomous robots must navigate reliably in unknown environments even under compromised exteroceptive perception, or perception failures. Such failures often occur when harsh environments lead to degraded sensing, or when the perception algorithm misinterprets the scene due to limited generalization. In this paper, we model perception failures as invisible obstacles and pits, and train a reinforcement learning (RL) based local navigation policy to guide our legged robot. Unlike previous works relying on heuristics and anomaly detection to update navigational information, we train our navigation policy to reconstruct the environment information in the latent space from corrupted perception and react to perception failures end-to-end. To this end, we incorporate both proprioception and exteroception into our policy inputs, thereby enabling the policy to sense collisions on different body parts and pits, prompting corresponding reactions. We validate our approach in simulation and on the real quadruped robot ANYmal running in real-time (<10 ms CPU inference). In a quantitative comparison with existing heuristic-based locally reactive planners, our policy increases the success rate over 30% when facing perception failures. Project Page: https://bit.ly/45NBTuh.
MEM: Multi-Modal Elevation Mapping for Robotics and Learning
Sep 28, 2023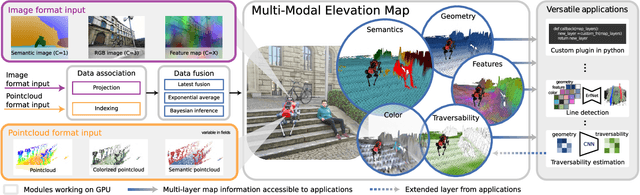
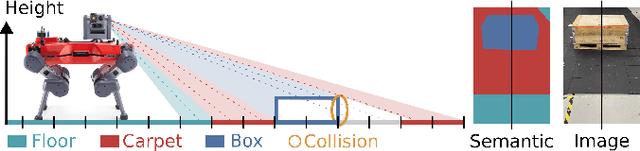

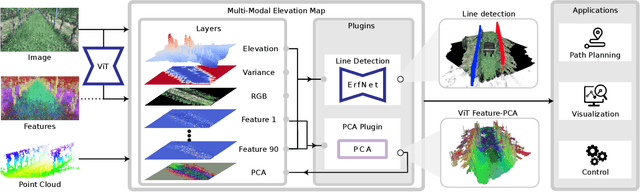
Elevation maps are commonly used to represent the environment of mobile robots and are instrumental for locomotion and navigation tasks. However, pure geometric information is insufficient for many field applications that require appearance or semantic information, which limits their applicability to other platforms or domains. In this work, we extend a 2.5D robot-centric elevation mapping framework by fusing multi-modal information from multiple sources into a popular map representation. The framework allows inputting data contained in point clouds or images in a unified manner. To manage the different nature of the data, we also present a set of fusion algorithms that can be selected based on the information type and user requirements. Our system is designed to run on the GPU, making it real-time capable for various robotic and learning tasks. We demonstrate the capabilities of our framework by deploying it on multiple robots with varying sensor configurations and showcasing a range of applications that utilize multi-modal layers, including line detection, human detection, and colorization.
Language-EXtended Indoor SLAM (LEXIS): A Versatile System for Real-time Visual Scene Understanding
Sep 26, 2023



Versatile and adaptive semantic understanding would enable autonomous systems to comprehend and interact with their surroundings. Existing fixed-class models limit the adaptability of indoor mobile and assistive autonomous systems. In this work, we introduce LEXIS, a real-time indoor Simultaneous Localization and Mapping (SLAM) system that harnesses the open-vocabulary nature of Large Language Models (LLMs) to create a unified approach to scene understanding and place recognition. The approach first builds a topological SLAM graph of the environment (using visual-inertial odometry) and embeds Contrastive Language-Image Pretraining (CLIP) features in the graph nodes. We use this representation for flexible room classification and segmentation, serving as a basis for room-centric place recognition. This allows loop closure searches to be directed towards semantically relevant places. Our proposed system is evaluated using both public, simulated data and real-world data, covering office and home environments. It successfully categorizes rooms with varying layouts and dimensions and outperforms the state-of-the-art (SOTA). For place recognition and trajectory estimation tasks we achieve equivalent performance to the SOTA, all also utilizing the same pre-trained model. Lastly, we demonstrate the system's potential for planning.
Fast Traversability Estimation for Wild Visual Navigation
May 16, 2023Natural environments such as forests and grasslands are challenging for robotic navigation because of the false perception of rigid obstacles from high grass, twigs, or bushes. In this work, we propose Wild Visual Navigation (WVN), an online self-supervised learning system for traversability estimation which uses only vision. The system is able to continuously adapt from a short human demonstration in the field. It leverages high-dimensional features from self-supervised visual transformer models, with an online scheme for supervision generation that runs in real-time on the robot. We demonstrate the advantages of our approach with experiments and ablation studies in challenging environments in forests, parks, and grasslands. Our system is able to bootstrap the traversable terrain segmentation in less than 5 min of in-field training time, enabling the robot to navigate in complex outdoor terrains - negotiating obstacles in high grass as well as a 1.4 km footpath following. While our experiments were executed with a quadruped robot, ANYmal, the approach presented can generalize to any ground robot.