 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDigiForest: Digital Analytics and Robotics for Sustainable Forestry
Apr 16, 2026Covering one third of Earth's land surface, forests are vital to global biodiversity, climate regulation, and human well-being. In Europe, forests and woodlands reach approximately 40% of land area, and the forestry sector is central to achieving the EU's climate neutrality and biodiversity goals; these emphasize sustainable forest management, increased use of long-lived wood products, and resilient forest ecosystems. To meet these goals and properly address their inherent challenges, current practices require further innovation. This chapter introduces DigiForest, a novel, large-scale precision forestry approach leveraging digital technologies and autonomous robotics. DigiForest is structured around four main components: (1) autonomous, heterogeneous mobile robots (aerial, legged, and marsupial) for tree-level data collection; (2) automated extraction of tree traits to build forest inventories; (3) a Decision Support System (DSS) for forecasting forest growth and supporting decision-making; and (4) low-impact selective logging using purpose-built autonomous harvesters. These technologies have been extensively validated in real-world conditions in several locations, including forests in Finland, the UK, and Switzerland.
Autonomous Forest Inventory with Legged Robots: System Design and Field Deployment
Apr 22, 2024We present a solution for autonomous forest inventory with a legged robotic platform. Compared to their wheeled and aerial counterparts, legged platforms offer an attractive balance of endurance and low soil impact for forest applications. In this paper, we present the complete system architecture of our forest inventory solution which includes state estimation, navigation, mission planning, and real-time tree segmentation and trait estimation. We present preliminary results for three campaigns in forests in Finland and the UK and summarize the main outcomes, lessons, and challenges. Our UK experiment at the Forest of Dean with the ANYmal D legged platform, achieved an autonomous survey of a 0.96 hectare plot in 20 min, identifying over 100 trees with typical DBH accuracy of 2 cm.
Online Tree Reconstruction and Forest Inventory on a Mobile Robotic System
Mar 26, 2024



Terrestrial laser scanning (TLS) is the standard technique used to create accurate point clouds for digital forest inventories. However, the measurement process is demanding, requiring up to two days per hectare for data collection, significant data storage, as well as resource-heavy post-processing of 3D data. In this work, we present a real-time mapping and analysis system that enables online generation of forest inventories using mobile laser scanners that can be mounted e.g. on mobile robots. Given incrementally created and locally accurate submaps-data payloads-our approach extracts tree candidates using a custom, Voronoi-inspired clustering algorithm. Tree candidates are reconstructed using an adapted Hough algorithm, which enables robust modeling of the tree stem. Further, we explicitly incorporate the incremental nature of the data collection by consistently updating the database using a pose graph LiDAR SLAM system. This enables us to refine our estimates of the tree traits if an area is revisited later during a mission. We demonstrate competitive accuracy to TLS or manual measurements using laser scanners that we mounted on backpacks or mobile robots operating in conifer, broad-leaf and mixed forests. Our results achieve RMSE of 1.93 cm, a bias of 0.65 cm and a standard deviation of 1.81 cm (averaged across these sequences)-with no post-processing required after the mission is complete.
Evaluation and Deployment of LiDAR-based Place Recognition in Dense Forests
Mar 21, 2024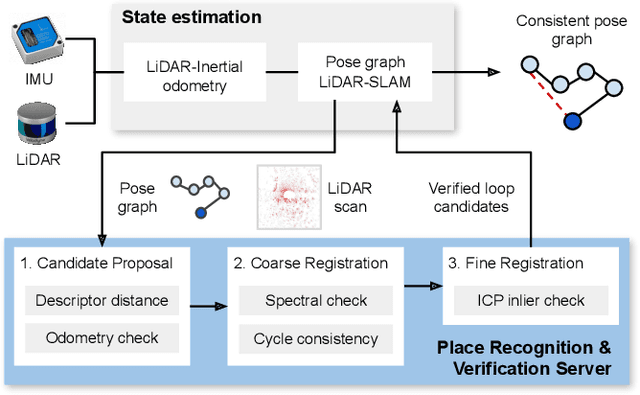
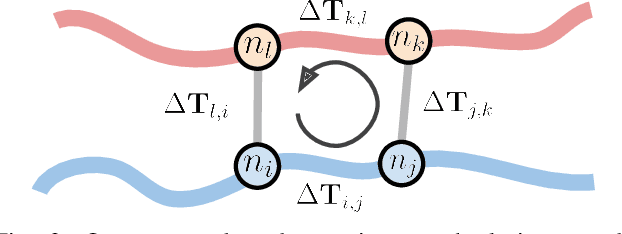
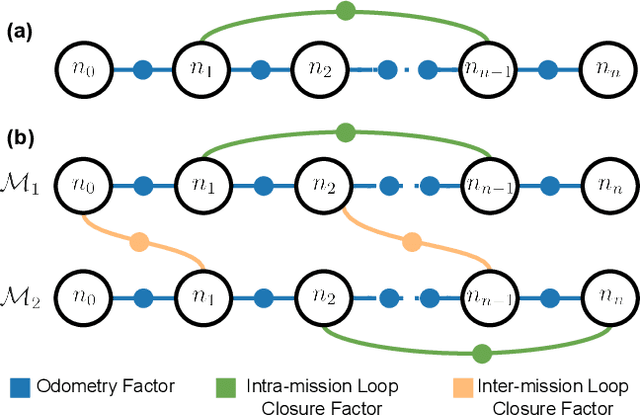
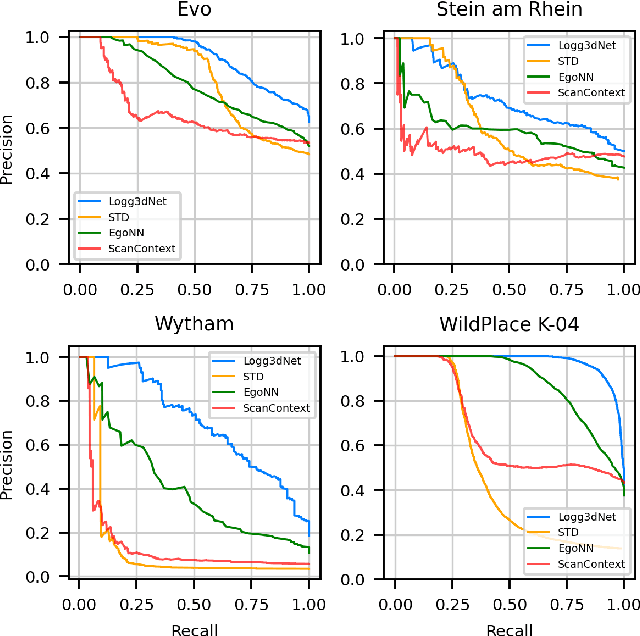
Many LiDAR place recognition systems have been developed and tested specifically for urban driving scenarios. Their performance in natural environments such as forests and woodlands have been studied less closely. In this paper, we analyzed the capabilities of four different LiDAR place recognition systems, both handcrafted and learning-based methods, using LiDAR data collected with a handheld device and legged robot within dense forest environments. In particular, we focused on evaluating localization where there is significant translational and orientation difference between corresponding LiDAR scan pairs. This is particularly important for forest survey systems where the sensor or robot does not follow a defined road or path. Extending our analysis we then incorporated the best performing approach, Logg3dNet, into a full 6-DoF pose estimation system -- introducing several verification layers for precise registration. We demonstrated the performance of our methods in three operational modes: online SLAM, offline multi-mission SLAM map merging, and relocalization into a prior map. We evaluated these modes using data captured in forests from three different countries, achieving 80% of correct loop closures candidates with baseline distances up to 5m, and 60% up to 10m.