 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLarge-Scale Autonomous Gas Monitoring for Volcanic Environments: A Legged Robot on Mount Etna
Jan 12, 2026Volcanic gas emissions are key precursors of eruptive activity. Yet, obtaining accurate near-surface measurements remains hazardous and logistically challenging, motivating the need for autonomous solutions. Limited mobility in rough volcanic terrain has prevented wheeled systems from performing reliable in situ gas measurements, reducing their usefulness as sensing platforms. We present a legged robotic system for autonomous volcanic gas analysis, utilizing the quadruped ANYmal, equipped with a quadrupole mass spectrometer system. Our modular autonomy stack integrates a mission planning interface, global planner, localization framework, and terrain-aware local navigation. We evaluated the system on Mount Etna across three autonomous missions in varied terrain, achieving successful gas-source detections with autonomy rates of 93-100%. In addition, we conducted a teleoperated mission in which the robot measured natural fumaroles, detecting sulfur dioxide and carbon dioxide. We discuss lessons learned from the gas-analysis and autonomy perspectives, emphasizing the need for adaptive sensing strategies, tighter integration of global and local planning, and improved hardware design.
Boxi: Design Decisions in the Context of Algorithmic Performance for Robotics
Apr 25, 2025Achieving robust autonomy in mobile robots operating in complex and unstructured environments requires a multimodal sensor suite capable of capturing diverse and complementary information. However, designing such a sensor suite involves multiple critical design decisions, such as sensor selection, component placement, thermal and power limitations, compute requirements, networking, synchronization, and calibration. While the importance of these key aspects is widely recognized, they are often overlooked in academia or retained as proprietary knowledge within large corporations. To improve this situation, we present Boxi, a tightly integrated sensor payload that enables robust autonomy of robots in the wild. This paper discusses the impact of payload design decisions made to optimize algorithmic performance for downstream tasks, specifically focusing on state estimation and mapping. Boxi is equipped with a variety of sensors: two LiDARs, 10 RGB cameras including high-dynamic range, global shutter, and rolling shutter models, an RGB-D camera, 7 inertial measurement units (IMUs) of varying precision, and a dual antenna RTK GNSS system. Our analysis shows that time synchronization, calibration, and sensor modality have a crucial impact on the state estimation performance. We frame this analysis in the context of cost considerations and environment-specific challenges. We also present a mobile sensor suite `cookbook` to serve as a comprehensive guideline, highlighting generalizable key design considerations and lessons learned during the development of Boxi. Finally, we demonstrate the versatility of Boxi being used in a variety of applications in real-world scenarios, contributing to robust autonomy. More details and code: https://github.com/leggedrobotics/grand_tour_box
Diffusion Based Robust LiDAR Place Recognition
Apr 16, 2025Mobile robots on construction sites require accurate pose estimation to perform autonomous surveying and inspection missions. Localization in construction sites is a particularly challenging problem due to the presence of repetitive features such as flat plastered walls and perceptual aliasing due to apartments with similar layouts inter and intra floors. In this paper, we focus on the global re-positioning of a robot with respect to an accurate scanned mesh of the building solely using LiDAR data. In our approach, a neural network is trained on synthetic LiDAR point clouds generated by simulating a LiDAR in an accurate real-life large-scale mesh. We train a diffusion model with a PointNet++ backbone, which allows us to model multiple position candidates from a single LiDAR point cloud. The resulting model can successfully predict the global position of LiDAR in confined and complex sites despite the adverse effects of perceptual aliasing. The learned distribution of potential global positions can provide multi-modal position distribution. We evaluate our approach across five real-world datasets and show the place recognition accuracy of 77% +/-2m on average while outperforming baselines at a factor of 2 in mean error.
Holistic Fusion: Task- and Setup-Agnostic Robot Localization and State Estimation with Factor Graphs
Apr 08, 2025Seamless operation of mobile robots in challenging environments requires low-latency local motion estimation (e.g., dynamic maneuvers) and accurate global localization (e.g., wayfinding). While most existing sensor-fusion approaches are designed for specific scenarios, this work introduces a flexible open-source solution for task- and setup-agnostic multimodal sensor fusion that is distinguished by its generality and usability. Holistic Fusion formulates sensor fusion as a combined estimation problem of i) the local and global robot state and ii) a (theoretically unlimited) number of dynamic context variables, including automatic alignment of reference frames; this formulation fits countless real-world applications without any conceptual modifications. The proposed factor-graph solution enables the direct fusion of an arbitrary number of absolute, local, and landmark measurements expressed with respect to different reference frames by explicitly including them as states in the optimization and modeling their evolution as random walks. Moreover, local smoothness and consistency receive particular attention to prevent jumps in the robot state belief. HF enables low-latency and smooth online state estimation on typical robot hardware while simultaneously providing low-drift global localization at the IMU measurement rate. The efficacy of this released framework is demonstrated in five real-world scenarios on three robotic platforms, each with distinct task requirements.
LEVA: A high-mobility logistic vehicle with legged suspension
Mar 13, 2025The autonomous transportation of materials over challenging terrain is a challenge with major economic implications and remains unsolved. This paper introduces LEVA, a high-payload, high-mobility robot designed for autonomous logistics across varied terrains, including those typical in agriculture, construction, and search and rescue operations. LEVA uniquely integrates an advanced legged suspension system using parallel kinematics. It is capable of traversing stairs using a rl controller, has steerable wheels, and includes a specialized box pickup mechanism that enables autonomous payload loading as well as precise and reliable cargo transportation of up to 85 kg across uneven surfaces, steps and inclines while maintaining a cot of as low as 0.15. Through extensive experimental validation, LEVA demonstrates its off-road capabilities and reliability regarding payload loading and transport.
ForestLPR: LiDAR Place Recognition in Forests Attentioning Multiple BEV Density Images
Mar 06, 2025Place recognition is essential to maintain global consistency in large-scale localization systems. While research in urban environments has progressed significantly using LiDARs or cameras, applications in natural forest-like environments remain largely under-explored. Furthermore, forests present particular challenges due to high self-similarity and substantial variations in vegetation growth over time. In this work, we propose a robust LiDAR-based place recognition method for natural forests, ForestLPR. We hypothesize that a set of cross-sectional images of the forest's geometry at different heights contains the information needed to recognize revisiting a place. The cross-sectional images are represented by \ac{bev} density images of horizontal slices of the point cloud at different heights. Our approach utilizes a visual transformer as the shared backbone to produce sets of local descriptors and introduces a multi-BEV interaction module to attend to information at different heights adaptively. It is followed by an aggregation layer that produces a rotation-invariant place descriptor. We evaluated the efficacy of our method extensively on real-world data from public benchmarks as well as robotic datasets and compared it against the state-of-the-art (SOTA) methods. The results indicate that ForestLPR has consistently good performance on all evaluations and achieves an average increase of 7.38\% and 9.11\% on Recall@1 over the closest competitor on intra-sequence loop closure detection and inter-sequence re-localization, respectively, validating our hypothesis
Continuous-Time State Estimation Methods in Robotics: A Survey
Nov 06, 2024



Accurate, efficient, and robust state estimation is more important than ever in robotics as the variety of platforms and complexity of tasks continue to grow. Historically, discrete-time filters and smoothers have been the dominant approach, in which the estimated variables are states at discrete sample times. The paradigm of continuous-time state estimation proposes an alternative strategy by estimating variables that express the state as a continuous function of time, which can be evaluated at any query time. Not only can this benefit downstream tasks such as planning and control, but it also significantly increases estimator performance and flexibility, as well as reduces sensor preprocessing and interfacing complexity. Despite this, continuous-time methods remain underutilized, potentially because they are less well-known within robotics. To remedy this, this work presents a unifying formulation of these methods and the most exhaustive literature review to date, systematically categorizing prior work by methodology, application, state variables, historical context, and theoretical contribution to the field. By surveying splines and Gaussian processes together and contextualizing works from other research domains, this work identifies and analyzes open problems in continuous-time state estimation and suggests new research directions.
Informed, Constrained, Aligned: A Field Analysis on Degeneracy-aware Point Cloud Registration in the Wild
Aug 21, 2024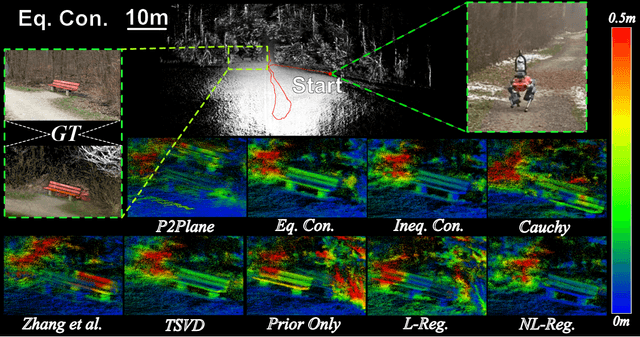
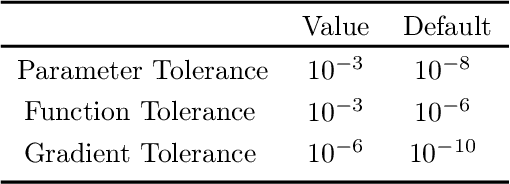
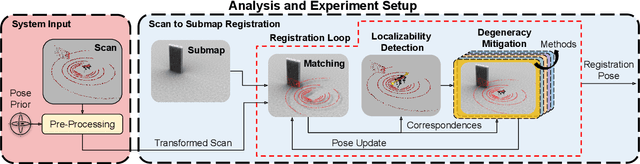
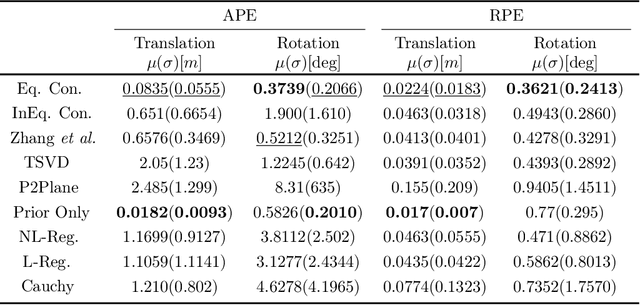
The ICP registration algorithm has been a preferred method for LiDAR-based robot localization for nearly a decade. However, even in modern SLAM solutions, ICP can degrade and become unreliable in geometrically ill-conditioned environments. Current solutions primarily focus on utilizing additional sources of information, such as external odometry, to either replace the degenerate directions of the optimization solution or add additional constraints in a sensor-fusion setup afterward. In response, this work investigates and compares new and existing degeneracy mitigation methods for robust LiDAR-based localization and analyzes the efficacy of these approaches in degenerate environments for the first time in the literature at this scale. Specifically, this work proposes and investigates i) the incorporation of different types of constraints into the ICP algorithm, ii) the effect of using active or passive degeneracy mitigation techniques, and iii) the choice of utilizing global point cloud registration methods on the ill-conditioned ICP problem in LiDAR degenerate environments. The study results are validated through multiple real-world field and simulated experiments. The analysis shows that active optimization degeneracy mitigation is necessary and advantageous in the absence of reliable external estimate assistance for LiDAR-SLAM. Furthermore, introducing degeneracy-aware hard constraints in the optimization before or during the optimization is shown to perform better in the wild than by including the constraints after. Moreover, with heuristic fine-tuned parameters, soft constraints can provide equal or better results in complex ill-conditioned scenarios. The implementations used in the analysis of this work are made publicly available to the community.
Autonomous Forest Inventory with Legged Robots: System Design and Field Deployment
Apr 22, 2024We present a solution for autonomous forest inventory with a legged robotic platform. Compared to their wheeled and aerial counterparts, legged platforms offer an attractive balance of endurance and low soil impact for forest applications. In this paper, we present the complete system architecture of our forest inventory solution which includes state estimation, navigation, mission planning, and real-time tree segmentation and trait estimation. We present preliminary results for three campaigns in forests in Finland and the UK and summarize the main outcomes, lessons, and challenges. Our UK experiment at the Forest of Dean with the ANYmal D legged platform, achieved an autonomous survey of a 0.96 hectare plot in 20 min, identifying over 100 trees with typical DBH accuracy of 2 cm.
Scientific Exploration of Challenging Planetary Analog Environments with a Team of Legged Robots
Jul 19, 2023The interest in exploring planetary bodies for scientific investigation and in-situ resource utilization is ever-rising. Yet, many sites of interest are inaccessible to state-of-the-art planetary exploration robots because of the robots' inability to traverse steep slopes, unstructured terrain, and loose soil. Additionally, current single-robot approaches only allow a limited exploration speed and a single set of skills. Here, we present a team of legged robots with complementary skills for exploration missions in challenging planetary analog environments. We equipped the robots with an efficient locomotion controller, a mapping pipeline for online and post-mission visualization, instance segmentation to highlight scientific targets, and scientific instruments for remote and in-situ investigation. Furthermore, we integrated a robotic arm on one of the robots to enable high-precision measurements. Legged robots can swiftly navigate representative terrains, such as granular slopes beyond 25 degrees, loose soil, and unstructured terrain, highlighting their advantages compared to wheeled rover systems. We successfully verified the approach in analog deployments at the BeyondGravity ExoMars rover testbed, in a quarry in Switzerland, and at the Space Resources Challenge in Luxembourg. Our results show that a team of legged robots with advanced locomotion, perception, and measurement skills, as well as task-level autonomy, can conduct successful, effective missions in a short time. Our approach enables the scientific exploration of planetary target sites that are currently out of human and robotic reach.