 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLarge Scale Robotic Material Handling: Learning, Planning, and Control
Aug 12, 2025Bulk material handling involves the efficient and precise moving of large quantities of materials, a core operation in many industries, including cargo ship unloading, waste sorting, construction, and demolition. These repetitive, labor-intensive, and safety-critical operations are typically performed using large hydraulic material handlers equipped with underactuated grippers. In this work, we present a comprehensive framework for the autonomous execution of large-scale material handling tasks. The system integrates specialized modules for environment perception, pile attack point selection, path planning, and motion control. The main contributions of this work are two reinforcement learning-based modules: an attack point planner that selects optimal grasping locations on the material pile to maximize removal efficiency and minimize the number of scoops, and a robust trajectory following controller that addresses the precision and safety challenges associated with underactuated grippers in movement, while utilizing their free-swinging nature to release material through dynamic throwing. We validate our framework through real-world experiments on a 40 t material handler in a representative worksite, focusing on two key tasks: high-throughput bulk pile management and high-precision truck loading. Comparative evaluations against human operators demonstrate the system's effectiveness in terms of precision, repeatability, and operational safety. To the best of our knowledge, this is the first complete automation of material handling tasks on a full scale.
CompSLAM: Complementary Hierarchical Multi-Modal Localization and Mapping for Robot Autonomy in Underground Environments
May 10, 2025Robot autonomy in unknown, GPS-denied, and complex underground environments requires real-time, robust, and accurate onboard pose estimation and mapping for reliable operations. This becomes particularly challenging in perception-degraded subterranean conditions under harsh environmental factors, including darkness, dust, and geometrically self-similar structures. This paper details CompSLAM, a highly resilient and hierarchical multi-modal localization and mapping framework designed to address these challenges. Its flexible architecture achieves resilience through redundancy by leveraging the complementary nature of pose estimates derived from diverse sensor modalities. Developed during the DARPA Subterranean Challenge, CompSLAM was successfully deployed on all aerial, legged, and wheeled robots of Team Cerberus during their competition-winning final run. Furthermore, it has proven to be a reliable odometry and mapping solution in various subsequent projects, with extensions enabling multi-robot map sharing for marsupial robotic deployments and collaborative mapping. This paper also introduces a comprehensive dataset acquired by a manually teleoperated quadrupedal robot, covering a significant portion of the DARPA Subterranean Challenge finals course. This dataset evaluates CompSLAM's robustness to sensor degradations as the robot traverses 740 meters in an environment characterized by highly variable geometries and demanding lighting conditions. The CompSLAM code and the DARPA SubT Finals dataset are made publicly available for the benefit of the robotics community
Boxi: Design Decisions in the Context of Algorithmic Performance for Robotics
Apr 25, 2025Achieving robust autonomy in mobile robots operating in complex and unstructured environments requires a multimodal sensor suite capable of capturing diverse and complementary information. However, designing such a sensor suite involves multiple critical design decisions, such as sensor selection, component placement, thermal and power limitations, compute requirements, networking, synchronization, and calibration. While the importance of these key aspects is widely recognized, they are often overlooked in academia or retained as proprietary knowledge within large corporations. To improve this situation, we present Boxi, a tightly integrated sensor payload that enables robust autonomy of robots in the wild. This paper discusses the impact of payload design decisions made to optimize algorithmic performance for downstream tasks, specifically focusing on state estimation and mapping. Boxi is equipped with a variety of sensors: two LiDARs, 10 RGB cameras including high-dynamic range, global shutter, and rolling shutter models, an RGB-D camera, 7 inertial measurement units (IMUs) of varying precision, and a dual antenna RTK GNSS system. Our analysis shows that time synchronization, calibration, and sensor modality have a crucial impact on the state estimation performance. We frame this analysis in the context of cost considerations and environment-specific challenges. We also present a mobile sensor suite `cookbook` to serve as a comprehensive guideline, highlighting generalizable key design considerations and lessons learned during the development of Boxi. Finally, we demonstrate the versatility of Boxi being used in a variety of applications in real-world scenarios, contributing to robust autonomy. More details and code: https://github.com/leggedrobotics/grand_tour_box
Holistic Fusion: Task- and Setup-Agnostic Robot Localization and State Estimation with Factor Graphs
Apr 08, 2025Seamless operation of mobile robots in challenging environments requires low-latency local motion estimation (e.g., dynamic maneuvers) and accurate global localization (e.g., wayfinding). While most existing sensor-fusion approaches are designed for specific scenarios, this work introduces a flexible open-source solution for task- and setup-agnostic multimodal sensor fusion that is distinguished by its generality and usability. Holistic Fusion formulates sensor fusion as a combined estimation problem of i) the local and global robot state and ii) a (theoretically unlimited) number of dynamic context variables, including automatic alignment of reference frames; this formulation fits countless real-world applications without any conceptual modifications. The proposed factor-graph solution enables the direct fusion of an arbitrary number of absolute, local, and landmark measurements expressed with respect to different reference frames by explicitly including them as states in the optimization and modeling their evolution as random walks. Moreover, local smoothness and consistency receive particular attention to prevent jumps in the robot state belief. HF enables low-latency and smooth online state estimation on typical robot hardware while simultaneously providing low-drift global localization at the IMU measurement rate. The efficacy of this released framework is demonstrated in five real-world scenarios on three robotic platforms, each with distinct task requirements.
Diffusion-Based Approximate MPC: Fast and Consistent Imitation of Multi-Modal Action Distributions
Apr 06, 2025Approximating model predictive control (MPC) using imitation learning (IL) allows for fast control without solving expensive optimization problems online. However, methods that use neural networks in a simple L2-regression setup fail to approximate multi-modal (set-valued) solution distributions caused by local optima found by the numerical solver or non-convex constraints, such as obstacles, significantly limiting the applicability of approximate MPC in practice. We solve this issue by using diffusion models to accurately represent the complete solution distribution (i.e., all modes) at high control rates (more than 1000 Hz). This work shows that diffusion based AMPC significantly outperforms L2-regression-based approximate MPC for multi-modal action distributions. In contrast to most earlier work on IL, we also focus on running the diffusion-based controller at a higher rate and in joint space instead of end-effector space. Additionally, we propose the use of gradient guidance during the denoising process to consistently pick the same mode in closed loop to prevent switching between solutions. We propose using the cost and constraint satisfaction of the original MPC problem during parallel sampling of solutions from the diffusion model to pick a better mode online. We evaluate our method on the fast and accurate control of a 7-DoF robot manipulator both in simulation and on hardware deployed at 250 Hz, achieving a speedup of more than 70 times compared to solving the MPC problem online and also outperforming the numerical optimization (used for training) in success ratio.
Continuous-Time State Estimation Methods in Robotics: A Survey
Nov 06, 2024



Accurate, efficient, and robust state estimation is more important than ever in robotics as the variety of platforms and complexity of tasks continue to grow. Historically, discrete-time filters and smoothers have been the dominant approach, in which the estimated variables are states at discrete sample times. The paradigm of continuous-time state estimation proposes an alternative strategy by estimating variables that express the state as a continuous function of time, which can be evaluated at any query time. Not only can this benefit downstream tasks such as planning and control, but it also significantly increases estimator performance and flexibility, as well as reduces sensor preprocessing and interfacing complexity. Despite this, continuous-time methods remain underutilized, potentially because they are less well-known within robotics. To remedy this, this work presents a unifying formulation of these methods and the most exhaustive literature review to date, systematically categorizing prior work by methodology, application, state variables, historical context, and theoretical contribution to the field. By surveying splines and Gaussian processes together and contextualizing works from other research domains, this work identifies and analyzes open problems in continuous-time state estimation and suggests new research directions.
Reinforcement Learning Control for Autonomous Hydraulic Material Handling Machines with Underactuated Tools
Oct 07, 2024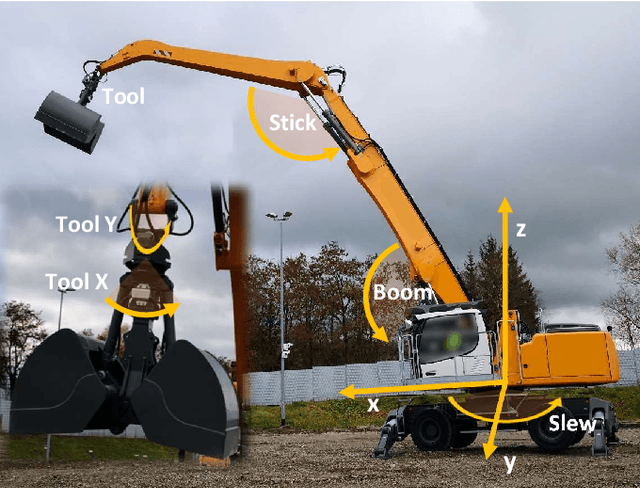
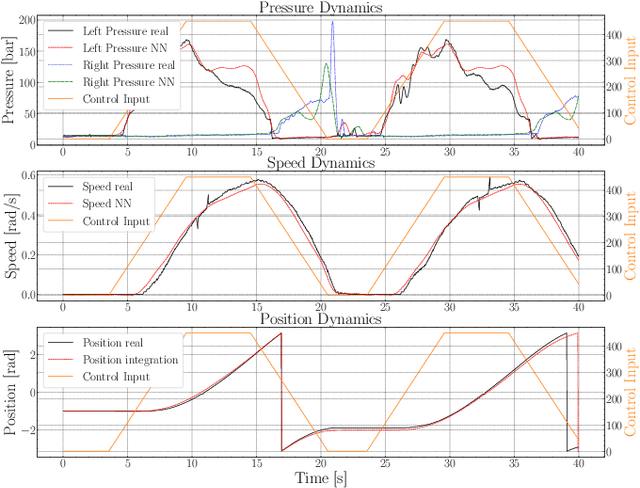
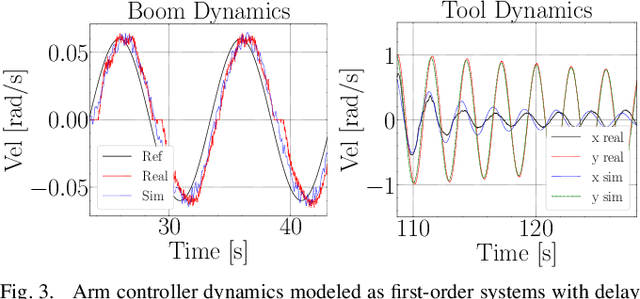
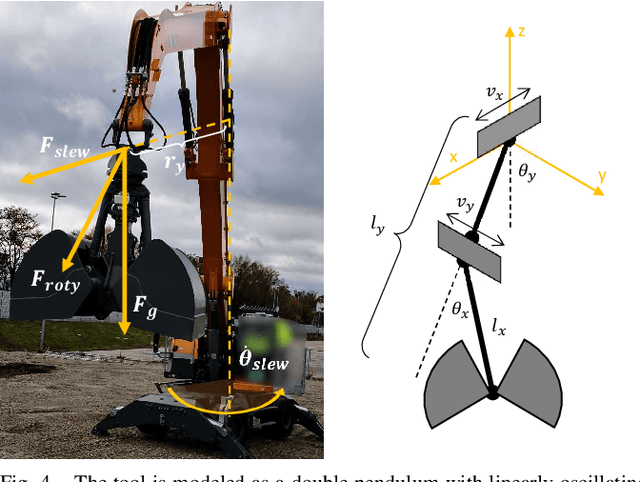
The precise and safe control of heavy material handling machines presents numerous challenges due to the hard-to-model hydraulically actuated joints and the need for collision-free trajectory planning with a free-swinging end-effector tool. In this work, we propose an RL-based controller that commands the cabin joint and the arm simultaneously. It is trained in a simulation combining data-driven modeling techniques with first-principles modeling. On the one hand, we employ a neural network model to capture the highly nonlinear dynamics of the upper carriage turn hydraulic motor, incorporating explicit pressure prediction to handle delays better. On the other hand, we model the arm as velocity-controllable and the free-swinging end-effector tool as a damped pendulum using first principles. This combined model enhances our simulation environment, enabling the training of RL controllers that can be directly transferred to the real machine. Designed to reach steady-state Cartesian targets, the RL controller learns to leverage the hydraulic dynamics to improve accuracy, maintain high speeds, and minimize end-effector tool oscillations. Our controller, tested on a mid-size prototype material handler, is more accurate than an inexperienced operator and causes fewer tool oscillations. It demonstrates competitive performance even compared to an experienced professional driver.
ETHcavation: A Dataset and Pipeline for Panoptic Scene Understanding and Object Tracking in Dynamic Construction Environments
Oct 05, 2024



Construction sites are challenging environments for autonomous systems due to their unstructured nature and the presence of dynamic actors, such as workers and machinery. This work presents a comprehensive panoptic scene understanding solution designed to handle the complexities of such environments by integrating 2D panoptic segmentation with 3D LiDAR mapping. Our system generates detailed environmental representations in real-time by combining semantic and geometric data, supported by Kalman Filter-based tracking for dynamic object detection. We introduce a fine-tuning method that adapts large pre-trained panoptic segmentation models for construction site applications using a limited number of domain-specific samples. For this use case, we release a first-of-its-kind dataset of 502 hand-labeled sample images with panoptic annotations from construction sites. In addition, we propose a dynamic panoptic mapping technique that enhances scene understanding in unstructured environments. As a case study, we demonstrate the system's application for autonomous navigation, utilizing real-time RRT* for reactive path planning in dynamic scenarios. The dataset (https://leggedrobotics.github.io/panoptic-scene-understanding.github.io/) and code (https://github.com/leggedrobotics/rsl_panoptic_mapping) for training and deployment are publicly available to support future research.
Informed, Constrained, Aligned: A Field Analysis on Degeneracy-aware Point Cloud Registration in the Wild
Aug 21, 2024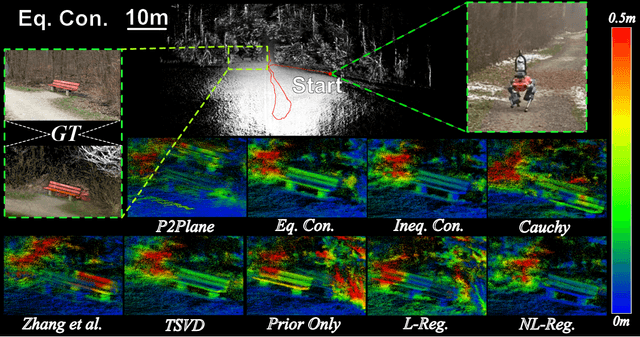
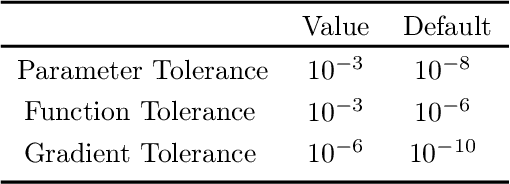
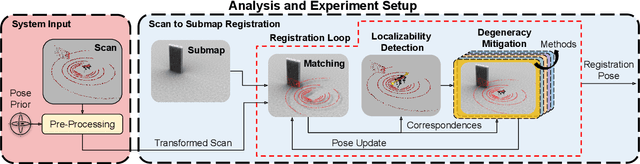
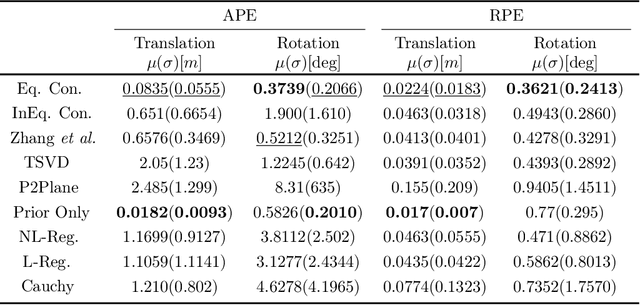
The ICP registration algorithm has been a preferred method for LiDAR-based robot localization for nearly a decade. However, even in modern SLAM solutions, ICP can degrade and become unreliable in geometrically ill-conditioned environments. Current solutions primarily focus on utilizing additional sources of information, such as external odometry, to either replace the degenerate directions of the optimization solution or add additional constraints in a sensor-fusion setup afterward. In response, this work investigates and compares new and existing degeneracy mitigation methods for robust LiDAR-based localization and analyzes the efficacy of these approaches in degenerate environments for the first time in the literature at this scale. Specifically, this work proposes and investigates i) the incorporation of different types of constraints into the ICP algorithm, ii) the effect of using active or passive degeneracy mitigation techniques, and iii) the choice of utilizing global point cloud registration methods on the ill-conditioned ICP problem in LiDAR degenerate environments. The study results are validated through multiple real-world field and simulated experiments. The analysis shows that active optimization degeneracy mitigation is necessary and advantageous in the absence of reliable external estimate assistance for LiDAR-SLAM. Furthermore, introducing degeneracy-aware hard constraints in the optimization before or during the optimization is shown to perform better in the wild than by including the constraints after. Moreover, with heuristic fine-tuned parameters, soft constraints can provide equal or better results in complex ill-conditioned scenarios. The implementations used in the analysis of this work are made publicly available to the community.
MultiViPerFrOG: A Globally Optimized Multi-Viewpoint Perception Framework for Camera Motion and Tissue Deformation
Aug 08, 2024Reconstructing the 3D shape of a deformable environment from the information captured by a moving depth camera is highly relevant to surgery. The underlying challenge is the fact that simultaneously estimating camera motion and tissue deformation in a fully deformable scene is an ill-posed problem, especially from a single arbitrarily moving viewpoint. Current solutions are often organ-specific and lack the robustness required to handle large deformations. Here we propose a multi-viewpoint global optimization framework that can flexibly integrate the output of low-level perception modules (data association, depth, and relative scene flow) with kinematic and scene-modeling priors to jointly estimate multiple camera motions and absolute scene flow. We use simulated noisy data to show three practical examples that successfully constrain the convergence to a unique solution. Overall, our method shows robustness to combined noisy input measures and can process hundreds of points in a few milliseconds. MultiViPerFrOG builds a generalized learning-free scaffolding for spatio-temporal encoding that can unlock advanced surgical scene representations and will facilitate the development of the computer-assisted-surgery technologies of the future.