 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeETHcavation: A Dataset and Pipeline for Panoptic Scene Understanding and Object Tracking in Dynamic Construction Environments
Oct 05, 2024



Construction sites are challenging environments for autonomous systems due to their unstructured nature and the presence of dynamic actors, such as workers and machinery. This work presents a comprehensive panoptic scene understanding solution designed to handle the complexities of such environments by integrating 2D panoptic segmentation with 3D LiDAR mapping. Our system generates detailed environmental representations in real-time by combining semantic and geometric data, supported by Kalman Filter-based tracking for dynamic object detection. We introduce a fine-tuning method that adapts large pre-trained panoptic segmentation models for construction site applications using a limited number of domain-specific samples. For this use case, we release a first-of-its-kind dataset of 502 hand-labeled sample images with panoptic annotations from construction sites. In addition, we propose a dynamic panoptic mapping technique that enhances scene understanding in unstructured environments. As a case study, we demonstrate the system's application for autonomous navigation, utilizing real-time RRT* for reactive path planning in dynamic scenarios. The dataset (https://leggedrobotics.github.io/panoptic-scene-understanding.github.io/) and code (https://github.com/leggedrobotics/rsl_panoptic_mapping) for training and deployment are publicly available to support future research.
Dynamic Throwing with Robotic Material Handling Machines
May 29, 2024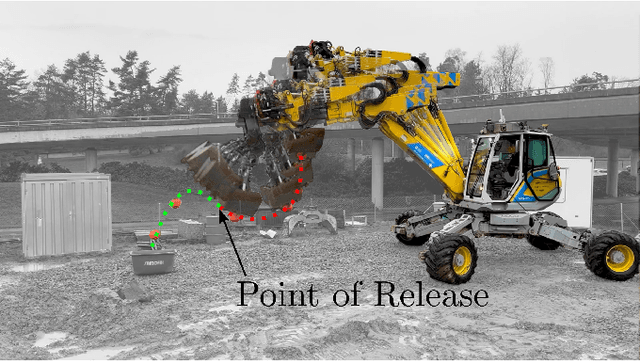
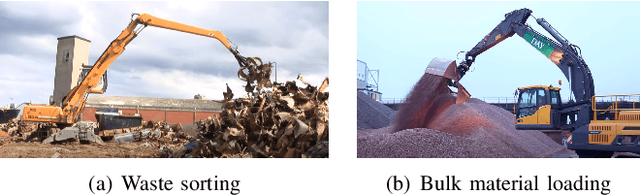
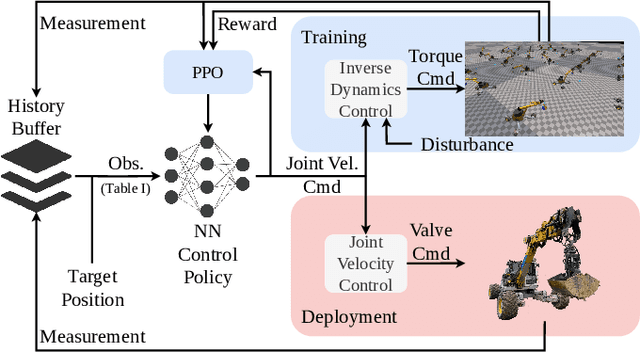
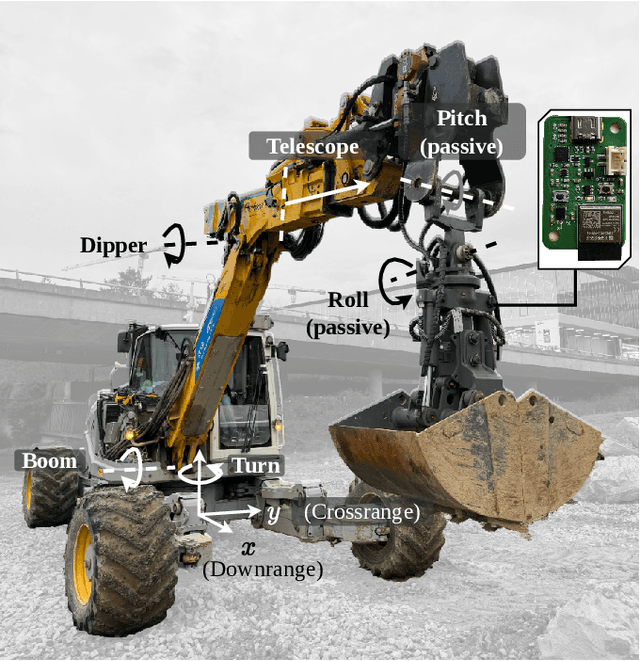
Automation of hydraulic material handling machinery is currently limited to semi-static pick-and-place cycles. Dynamic throwing motions which utilize the passive joints, can greatly improve time efficiency as well as increase the dumping workspace. In this work, we use Reinforcement Learning (RL) to design dynamic controllers for material handlers with underactuated arms as commonly used in logistics. The controllers are tested both in simulation and in real-world experiments on a 12-ton test platform. The method is able to exploit the passive joints of the gripper to perform dynamic throwing motions. With the proposed controllers, the machine is able to throw individual objects to targets outside the static reachability zone with good accuracy for its practical applications. The work demonstrates the possibility of using RL to perform highly dynamic tasks with heavy machinery, suggesting a potential for improving the efficiency and precision of autonomous material handling tasks.