 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDigiForest: Digital Analytics and Robotics for Sustainable Forestry
Apr 16, 2026Covering one third of Earth's land surface, forests are vital to global biodiversity, climate regulation, and human well-being. In Europe, forests and woodlands reach approximately 40% of land area, and the forestry sector is central to achieving the EU's climate neutrality and biodiversity goals; these emphasize sustainable forest management, increased use of long-lived wood products, and resilient forest ecosystems. To meet these goals and properly address their inherent challenges, current practices require further innovation. This chapter introduces DigiForest, a novel, large-scale precision forestry approach leveraging digital technologies and autonomous robotics. DigiForest is structured around four main components: (1) autonomous, heterogeneous mobile robots (aerial, legged, and marsupial) for tree-level data collection; (2) automated extraction of tree traits to build forest inventories; (3) a Decision Support System (DSS) for forecasting forest growth and supporting decision-making; and (4) low-impact selective logging using purpose-built autonomous harvesters. These technologies have been extensively validated in real-world conditions in several locations, including forests in Finland, the UK, and Switzerland.
ToolGym: an Open-world Tool-using Environment for Scalable Agent Testing and Data Curation
Jan 09, 2026Tool-using LLM agents still struggle in open-world settings with large tool pools, long-horizon objectives, wild constraints, and unreliable tool states. For scalable and realistic training and testing, we introduce an open-world tool-using environment, built on 5,571 format unified tools across 204 commonly used apps. It includes a task creation engine that synthesizes long-horizon, multi-tool workflows with wild constraints, and a state controller that injects interruptions and failures to stress-test robustness. On top of this environment, we develop a tool select-then-execute agent framework with a planner-actor decomposition to separate deliberate reasoning and self-correction from step-wise execution. Comprehensive evaluation of state-of-the-art LLMs reveals the misalignment between tool planning and execution abilities, the constraint following weakness of existing LLMs, and DeepSeek-v3.2's strongest robustness. Finally, we collect 1,170 trajectories from our environment to fine-tune LLMs, achieving superior performance to baselines using 119k samples, indicating the environment's value as both a realistic benchmark and a data engine for tool-using agents. Our code and data will be publicly released.
SAHA: Supervised Autonomous HArvester for selective forest thinning
Jan 03, 2026Forestry plays a vital role in our society, creating significant ecological, economic, and recreational value. Efficient forest management involves labor-intensive and complex operations. One essential task for maintaining forest health and productivity is selective thinning, which requires skilled operators to remove specific trees to create optimal growing conditions for the remaining ones. In this work, we present a solution based on a small-scale robotic harvester (SAHA) designed for executing this task with supervised autonomy. We build on a 4.5-ton harvester platform and implement key hardware modifications for perception and automatic control. We implement learning- and model-based approaches for precise control of hydraulic actuators, accurate navigation through cluttered environments, robust state estimation, and reliable semantic estimation of terrain traversability. Integrating state-of-the-art techniques in perception, planning, and control, our robotic harvester can autonomously navigate forest environments and reach targeted trees for selective thinning. We present experimental results from extensive field trials over kilometer-long autonomous missions in northern European forests, demonstrating the harvester's ability to operate in real forests. We analyze the performance and provide the lessons learned for advancing robotic forest management.
Large Scale Robotic Material Handling: Learning, Planning, and Control
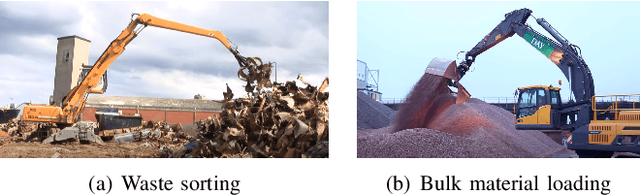
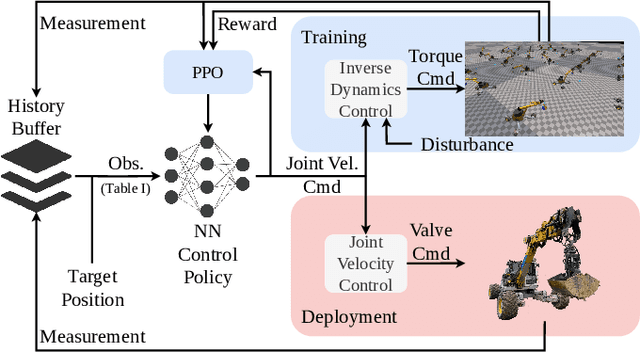
Aug 12, 2025Bulk material handling involves the efficient and precise moving of large quantities of materials, a core operation in many industries, including cargo ship unloading, waste sorting, construction, and demolition. These repetitive, labor-intensive, and safety-critical operations are typically performed using large hydraulic material handlers equipped with underactuated grippers. In this work, we present a comprehensive framework for the autonomous execution of large-scale material handling tasks. The system integrates specialized modules for environment perception, pile attack point selection, path planning, and motion control. The main contributions of this work are two reinforcement learning-based modules: an attack point planner that selects optimal grasping locations on the material pile to maximize removal efficiency and minimize the number of scoops, and a robust trajectory following controller that addresses the precision and safety challenges associated with underactuated grippers in movement, while utilizing their free-swinging nature to release material through dynamic throwing. We validate our framework through real-world experiments on a 40 t material handler in a representative worksite, focusing on two key tasks: high-throughput bulk pile management and high-precision truck loading. Comparative evaluations against human operators demonstrate the system's effectiveness in terms of precision, repeatability, and operational safety. To the best of our knowledge, this is the first complete automation of material handling tasks on a full scale.
Causal-Copilot: An Autonomous Causal Analysis Agent
Apr 21, 2025Causal analysis plays a foundational role in scientific discovery and reliable decision-making, yet it remains largely inaccessible to domain experts due to its conceptual and algorithmic complexity. This disconnect between causal methodology and practical usability presents a dual challenge: domain experts are unable to leverage recent advances in causal learning, while causal researchers lack broad, real-world deployment to test and refine their methods. To address this, we introduce Causal-Copilot, an autonomous agent that operationalizes expert-level causal analysis within a large language model framework. Causal-Copilot automates the full pipeline of causal analysis for both tabular and time-series data -- including causal discovery, causal inference, algorithm selection, hyperparameter optimization, result interpretation, and generation of actionable insights. It supports interactive refinement through natural language, lowering the barrier for non-specialists while preserving methodological rigor. By integrating over 20 state-of-the-art causal analysis techniques, our system fosters a virtuous cycle -- expanding access to advanced causal methods for domain experts while generating rich, real-world applications that inform and advance causal theory. Empirical evaluations demonstrate that Causal-Copilot achieves superior performance compared to existing baselines, offering a reliable, scalable, and extensible solution that bridges the gap between theoretical sophistication and real-world applicability in causal analysis. A live interactive demo of Causal-Copilot is available at https://causalcopilot.com/.
A Review of Multimodal Explainable Artificial Intelligence: Past, Present and Future
Dec 18, 2024



Artificial intelligence (AI) has rapidly developed through advancements in computational power and the growth of massive datasets. However, this progress has also heightened challenges in interpreting the "black-box" nature of AI models. To address these concerns, eXplainable AI (XAI) has emerged with a focus on transparency and interpretability to enhance human understanding and trust in AI decision-making processes. In the context of multimodal data fusion and complex reasoning scenarios, the proposal of Multimodal eXplainable AI (MXAI) integrates multiple modalities for prediction and explanation tasks. Meanwhile, the advent of Large Language Models (LLMs) has led to remarkable breakthroughs in natural language processing, yet their complexity has further exacerbated the issue of MXAI. To gain key insights into the development of MXAI methods and provide crucial guidance for building more transparent, fair, and trustworthy AI systems, we review the MXAI methods from a historical perspective and categorize them across four eras: traditional machine learning, deep learning, discriminative foundation models, and generative LLMs. We also review evaluation metrics and datasets used in MXAI research, concluding with a discussion of future challenges and directions. A project related to this review has been created at https://github.com/ShilinSun/mxai_review.
Reinforcement Learning Control for Autonomous Hydraulic Material Handling Machines with Underactuated Tools
Oct 07, 2024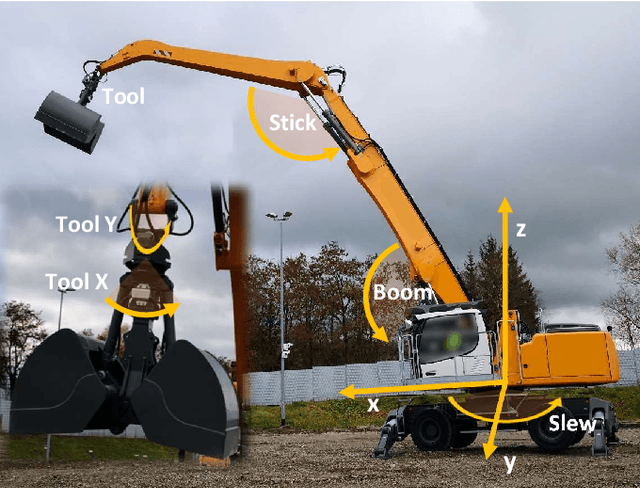
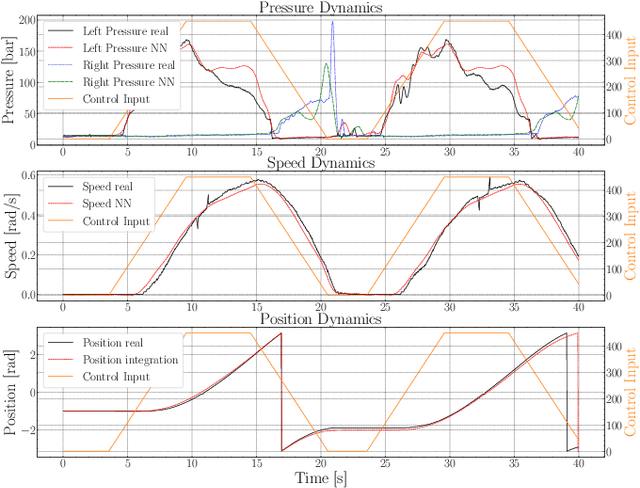
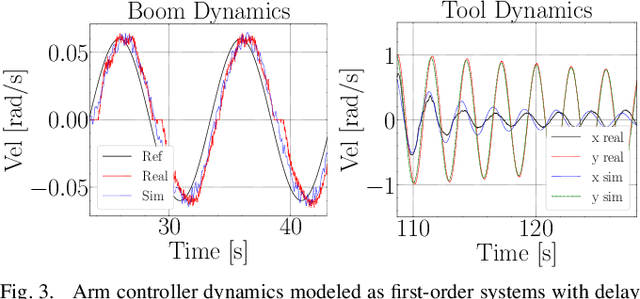
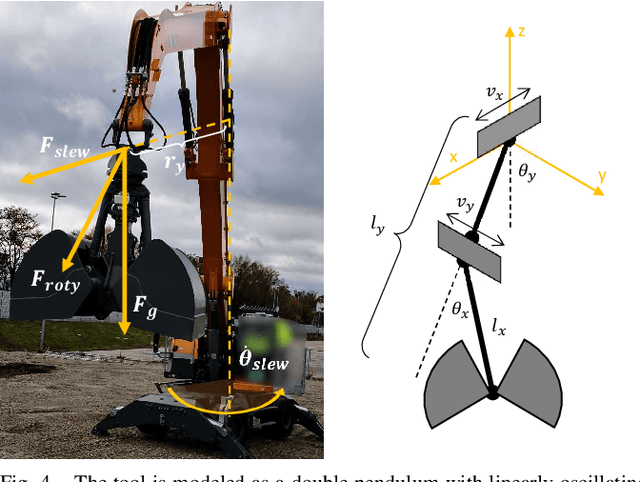
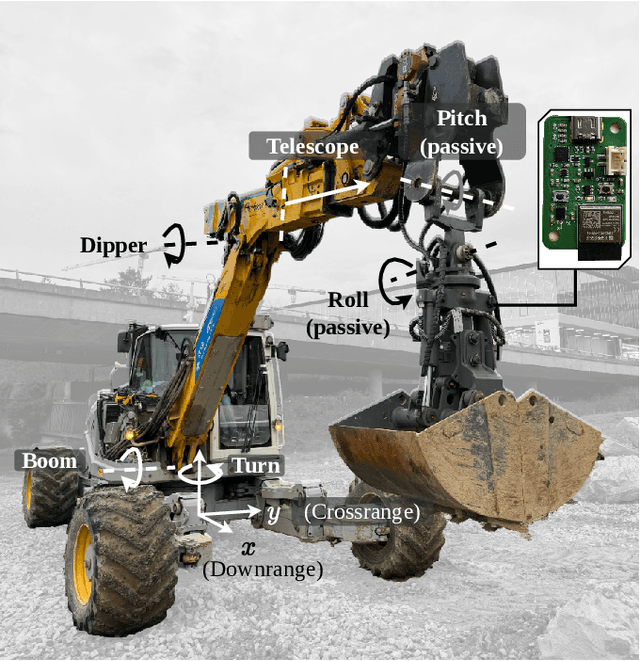
The precise and safe control of heavy material handling machines presents numerous challenges due to the hard-to-model hydraulically actuated joints and the need for collision-free trajectory planning with a free-swinging end-effector tool. In this work, we propose an RL-based controller that commands the cabin joint and the arm simultaneously. It is trained in a simulation combining data-driven modeling techniques with first-principles modeling. On the one hand, we employ a neural network model to capture the highly nonlinear dynamics of the upper carriage turn hydraulic motor, incorporating explicit pressure prediction to handle delays better. On the other hand, we model the arm as velocity-controllable and the free-swinging end-effector tool as a damped pendulum using first principles. This combined model enhances our simulation environment, enabling the training of RL controllers that can be directly transferred to the real machine. Designed to reach steady-state Cartesian targets, the RL controller learns to leverage the hydraulic dynamics to improve accuracy, maintain high speeds, and minimize end-effector tool oscillations. Our controller, tested on a mid-size prototype material handler, is more accurate than an inexperienced operator and causes fewer tool oscillations. It demonstrates competitive performance even compared to an experienced professional driver.
Dynamic Throwing with Robotic Material Handling Machines
May 29, 2024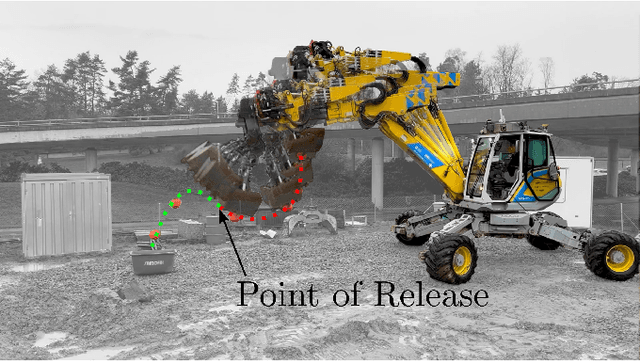
Automation of hydraulic material handling machinery is currently limited to semi-static pick-and-place cycles. Dynamic throwing motions which utilize the passive joints, can greatly improve time efficiency as well as increase the dumping workspace. In this work, we use Reinforcement Learning (RL) to design dynamic controllers for material handlers with underactuated arms as commonly used in logistics. The controllers are tested both in simulation and in real-world experiments on a 12-ton test platform. The method is able to exploit the passive joints of the gripper to perform dynamic throwing motions. With the proposed controllers, the machine is able to throw individual objects to targets outside the static reachability zone with good accuracy for its practical applications. The work demonstrates the possibility of using RL to perform highly dynamic tasks with heavy machinery, suggesting a potential for improving the efficiency and precision of autonomous material handling tasks.
Motion Primitives Planning For Center-Articulated Vehicles
May 27, 2024Autonomous navigation across unstructured terrains, including forests and construction areas, faces unique challenges due to intricate obstacles and the element of the unknown. Lacking pre-existing maps, these scenarios necessitate a motion planning approach that combines agility with efficiency. Critically, it must also incorporate the robot's kinematic constraints to navigate more effectively through complex environments. This work introduces a novel planning method for center-articulated vehicles (CAV), leveraging motion primitives within a receding horizon planning framework using onboard sensing. The approach commences with the offline creation of motion primitives, generated through forward simulations that reflect the distinct kinematic model of center-articulated vehicles. These primitives undergo evaluation through a heuristic-based scoring function, facilitating the selection of the most suitable path for real-time navigation. To augment this planning process, we develop a pose-stabilizing controller, tailored to the kinematic specifications of center-articulated vehicles. During experiments, our method demonstrates a $67\%$ improvement in SPL (Success Rate weighted by Path Length) performance over existing strategies. Furthermore, its efficacy was validated through real-world experiments conducted with a tree harvester vehicle - SAHA.
A Unified Optimal Transport Framework for Cross-Modal Retrieval with Noisy Labels
Mar 20, 2024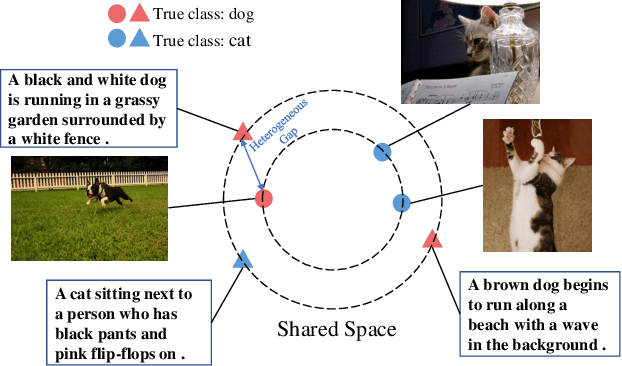
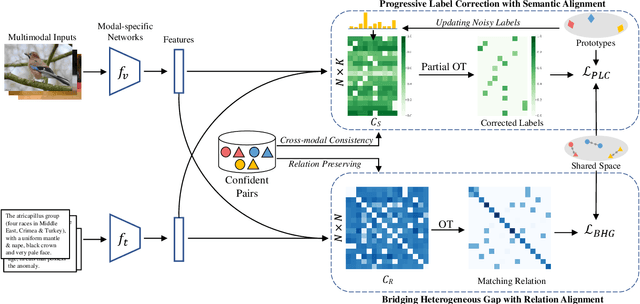
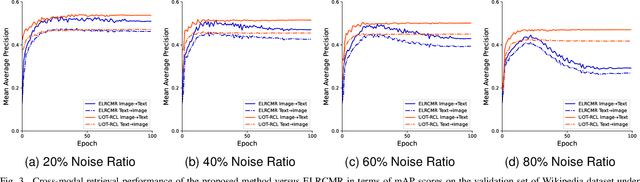
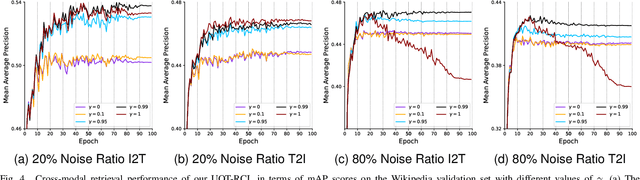
Cross-modal retrieval (CMR) aims to establish interaction between different modalities, among which supervised CMR is emerging due to its flexibility in learning semantic category discrimination. Despite the remarkable performance of previous supervised CMR methods, much of their success can be attributed to the well-annotated data. However, even for unimodal data, precise annotation is expensive and time-consuming, and it becomes more challenging with the multimodal scenario. In practice, massive multimodal data are collected from the Internet with coarse annotation, which inevitably introduces noisy labels. Training with such misleading labels would bring two key challenges -- enforcing the multimodal samples to \emph{align incorrect semantics} and \emph{widen the heterogeneous gap}, resulting in poor retrieval performance. To tackle these challenges, this work proposes UOT-RCL, a Unified framework based on Optimal Transport (OT) for Robust Cross-modal Retrieval. First, we propose a semantic alignment based on partial OT to progressively correct the noisy labels, where a novel cross-modal consistent cost function is designed to blend different modalities and provide precise transport cost. Second, to narrow the discrepancy in multi-modal data, an OT-based relation alignment is proposed to infer the semantic-level cross-modal matching. Both of these two components leverage the inherent correlation among multi-modal data to facilitate effective cost function. The experiments on three widely-used cross-modal retrieval datasets demonstrate that our UOT-RCL surpasses the state-of-the-art approaches and significantly improves the robustness against noisy labels.