 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUWB Anchor Based Localization of a Planetary Rover
Apr 10, 2025



Localization of an autonomous mobile robot during planetary exploration is challenging due to the unknown terrain, the difficult lighting conditions and the lack of any global reference such as satellite navigation systems. We present a novel approach for robot localization based on ultra-wideband (UWB) technology. The robot sets up its own reference coordinate system by distributing UWB anchor nodes in the environment via a rocket-propelled launcher system. This allows the creation of a localization space in which UWB measurements are employed to supplement traditional SLAM-based techniques. The system was developed for our involvement in the ESA-ESRIC challenge 2021 and the AMADEE-24, an analog Mars simulation in Armenia by the Austrian Space Forum (\"OWF).
Direction Finding for Software Defined Radios with Switched Uniform Circular Arrays
Feb 12, 2025



Accurate Direction of Arrival (DoA) estimation is critical for applications in robotics and communication, but high costs and complexity of coherent multi-channel receivers hinder accessibility. This work proposes a cost-effective DoA estimation system for continuous wave (CW) signals in the 2.4 GHz ISM band. A two-channel software-defined radio (SDR) with time-division multiplexing (TDM) enables pseudo-coherent sampling of an eight-element uniform circular array (UCA) with low hardware complexity. A central reference antenna mitigates phase jitter and sampling errors. The system applies an enhanced MUSIC algorithm with spatial smoothing to handle light multipath interference in indoor and outdoor environments. Experiments in an anechoic chamber validate accuracy under ideal conditions, while real-world tests confirm robust performance in multipath-prone scenarios. With 5 Hz DoA updates and post-processing to enhance tracking, the system provides an accessible and reliable solution for DoA estimation in real-world environments.
Obstacle-Avoidant Leader Following with a Quadruped Robot
Oct 01, 2024Personal mobile robotic assistants are expected to find wide applications in industry and healthcare. For example, people with limited mobility can benefit from robots helping with daily tasks, or construction workers can have robots perform precision monitoring tasks on-site. However, manually steering a robot while in motion requires significant concentration from the operator, especially in tight or crowded spaces. This reduces walking speed, and the constant need for vigilance increases fatigue and, thus, the risk of accidents. This work presents a virtual leash with which a robot can naturally follow an operator. We use a sensor fusion based on a custom-built RF transponder, RGB cameras, and a LiDAR. In addition, we customize a local avoidance planner for legged platforms, which enables us to navigate dynamic and narrow environments. We successfully validate on the ANYmal platform the robustness and performance of our entire pipeline in real-world experiments.
Daedalus 2: Autorotation Entry, Descent and Landing Experiment on REXUS29
Jun 17, 2024



In recent years, interplanetary exploration has gained significant momentum, leading to a focus on the development of launch vehicles. However, the critical technology of edl mechanisms has not received the same level of attention and remains less mature and capable. To address this gap, we took advantage of the REXUS program to develop a pioneering edl mechanism. We propose an alternative to conventional, parachute based landing vehicles by utilizing autorotation. Our approach enables future additions such as steerability, controllability, and the possibility of a soft landing. To validate the technique and our specific implementation, we conducted a sounding rocket experiment on REXUS29. The systems design is outlined with relevant design decisions and constraints, covering software, mechanics, electronics and control systems. Furthermore, an emphasis will also be the organization and setup of the team entirely made up and executed by students. The flight results on REXUS itself are presented, including the most important outcomes and possible reasons for mission failure. We have not archived an autorotation based landing, but provide a reliable way of building and operating such vehicles. Ultimately, future works and possibilities for improvements are outlined. The research presented in this paper highlights the need for continued exploration and development of edl mechanisms for future interplanetary missions. By discussing our results, we hope to inspire further research in this area and contribute to the advancement of space exploration technology.
Dynamic Throwing with Robotic Material Handling Machines
May 29, 2024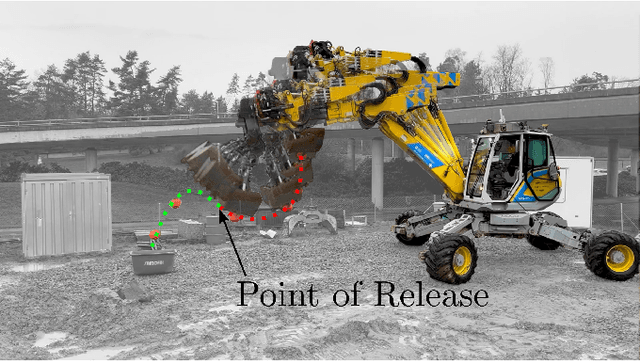
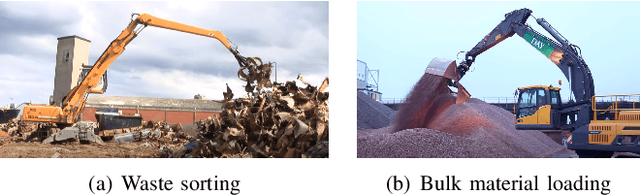
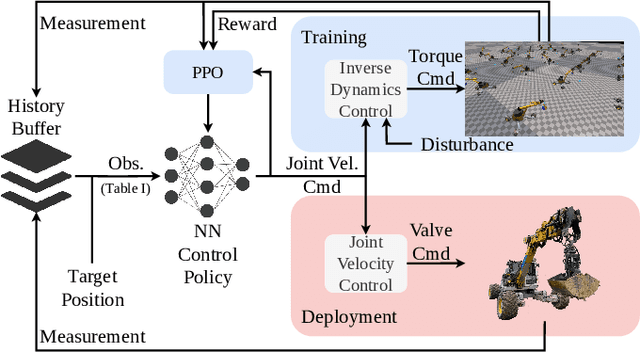
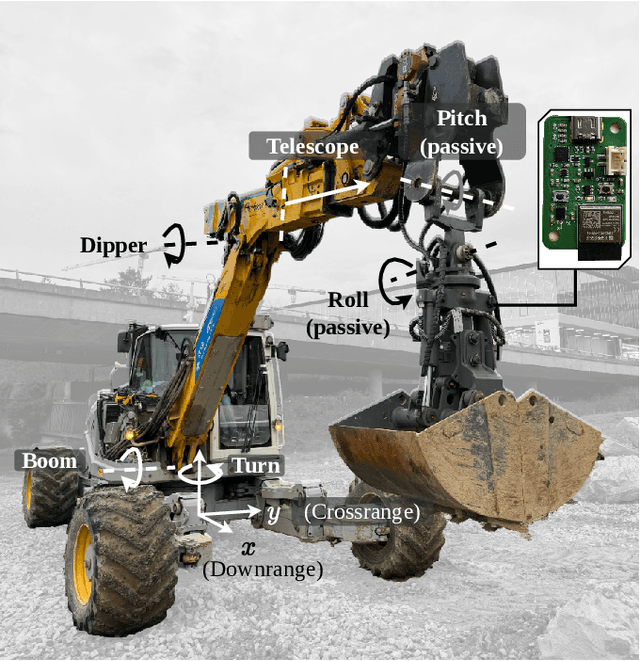
Automation of hydraulic material handling machinery is currently limited to semi-static pick-and-place cycles. Dynamic throwing motions which utilize the passive joints, can greatly improve time efficiency as well as increase the dumping workspace. In this work, we use Reinforcement Learning (RL) to design dynamic controllers for material handlers with underactuated arms as commonly used in logistics. The controllers are tested both in simulation and in real-world experiments on a 12-ton test platform. The method is able to exploit the passive joints of the gripper to perform dynamic throwing motions. With the proposed controllers, the machine is able to throw individual objects to targets outside the static reachability zone with good accuracy for its practical applications. The work demonstrates the possibility of using RL to perform highly dynamic tasks with heavy machinery, suggesting a potential for improving the efficiency and precision of autonomous material handling tasks.