 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeyond Cybathlon: On-demand Quadrupedal Assistance for People with Limited Mobility
Mar 17, 2026Background: Assistance robots have the potential to increase the independence of people who need daily care due to limited mobility or being wheelchair-bound. Current solutions of attaching robotic arms to motorized wheelchairs offer limited additional mobility at the cost of increased size and reduced wheelchair maneuverability. Methods: We present an on-demand quadrupedal assistance robot system controlled via a shared autonomy approach, which combines semi-autonomous task execution with human teleoperation. Due to the mobile nature of the system it can assist the operator whenever needed and perform autonomous tasks independently, without otherwise restricting their mobility. We automate pick-and-place tasks, as well as robot movement through the environment with semantic, collision-aware navigation. For teleoperation, we present a mouth-level joystick interface that enables an operator with reduced mobility to control the robot's end effector for precision manipulation. Results: We showcase our system in the \textit{Cybathlon 2024 Assistance Robot Race}, and validate it in an at-home experimental setup, where we measure task completion times and user satisfaction. We find our system capable of assisting in a broad variety of tasks, including those that require dexterous manipulation. The user study confirms the intuition that increased robot autonomy alleviates the operator's mental load. Conclusions: We present a flexible system that has the potential to help people in wheelchairs maintain independence in everyday life by enabling them to solve mobile manipulation problems without external support. We achieve results comparable to previous state-of-the-art on subjective metrics while allowing for more autonomy of the operator and greater agility for manipulation.
Magnecko: Design and Control of a Quadrupedal Magnetic Climbing Robot
Apr 18, 2025Climbing robots hold significant promise for applications such as industrial inspection and maintenance, particularly in hazardous or hard-to-reach environments. This paper describes the quadrupedal climbing robot Magnecko, developed with the major goal of providing a research platform for legged climbing locomotion. With its 12 actuated degrees of freedom arranged in an insect-style joint configuration, Magnecko's high manipulability and high range of motion allow it to handle challenging environments like overcoming concave 90 degree corners. A model predictive controller enables Magnecko to crawl on the ground on horizontal overhangs and on vertical walls. Thanks to the custom actuators and the electro-permanent magnets that are used for adhesion on ferrous surfaces, the system is powerful enough to carry additional payloads of at least 65 percent of its own weight in all orientations. The Magnecko platform serves as a foundation for climbing locomotion in complex three-dimensional environments.
Obstacle-Avoidant Leader Following with a Quadruped Robot
Oct 01, 2024Personal mobile robotic assistants are expected to find wide applications in industry and healthcare. For example, people with limited mobility can benefit from robots helping with daily tasks, or construction workers can have robots perform precision monitoring tasks on-site. However, manually steering a robot while in motion requires significant concentration from the operator, especially in tight or crowded spaces. This reduces walking speed, and the constant need for vigilance increases fatigue and, thus, the risk of accidents. This work presents a virtual leash with which a robot can naturally follow an operator. We use a sensor fusion based on a custom-built RF transponder, RGB cameras, and a LiDAR. In addition, we customize a local avoidance planner for legged platforms, which enables us to navigate dynamic and narrow environments. We successfully validate on the ANYmal platform the robustness and performance of our entire pipeline in real-world experiments.
A Collision-Free MPC for Whole-Body Dynamic Locomotion and Manipulation
Feb 24, 2022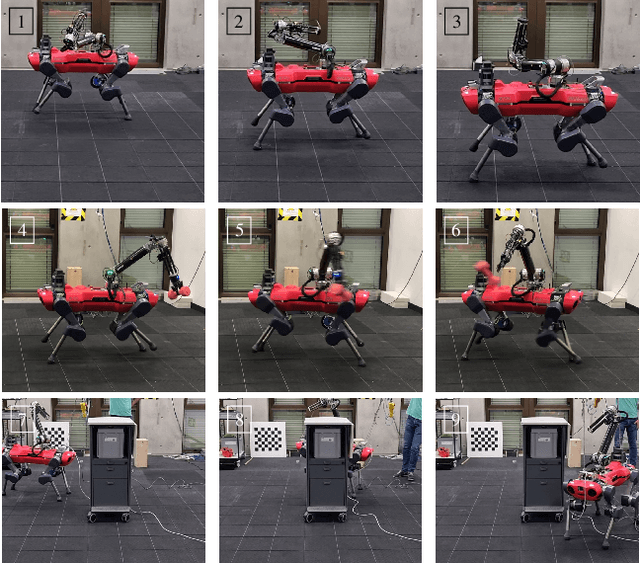
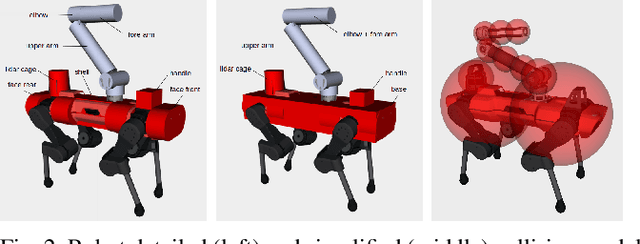

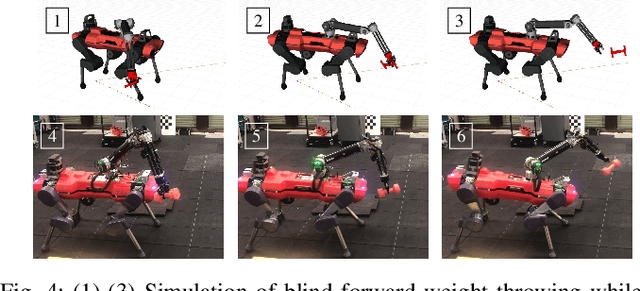
In this paper, we present a real-time whole-body planner for collision-free legged mobile manipulation. We enforce both self-collision and environment-collision avoidance as soft constraints within a Model Predictive Control (MPC) scheme that solves a multi-contact optimal control problem. By penalizing the signed distances among a set of representative primitive collision bodies, the robot is able to safely execute a variety of dynamic maneuvers while preventing any self-collisions. Moreover, collision-free navigation and manipulation in both static and dynamic environments are made viable through efficient queries of distances and their gradients via a euclidean signed distance field. We demonstrate through a comparative study that our approach only slightly increases the computational complexity of the MPC planning. Finally, we validate the effectiveness of our framework through a set of hardware experiments involving dynamic mobile manipulation tasks with potential collisions, such as locomotion balancing with the swinging arm, weight throwing, and autonomous door opening.