 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Collision-Free MPC for Whole-Body Dynamic Locomotion and Manipulation
Paper and Code
Feb 24, 2022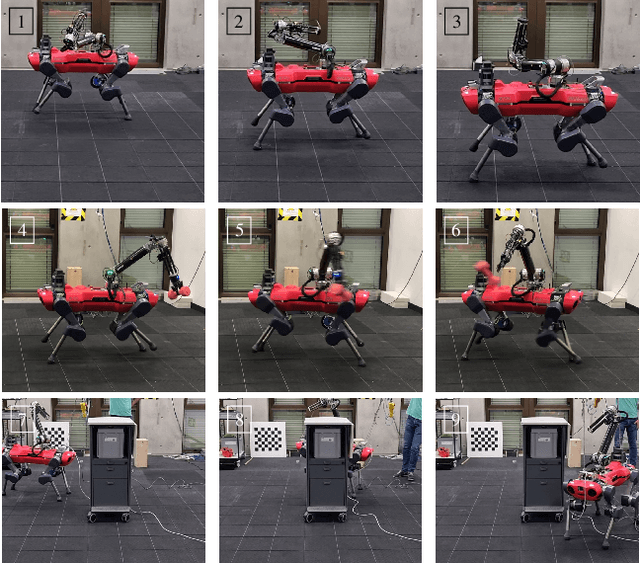
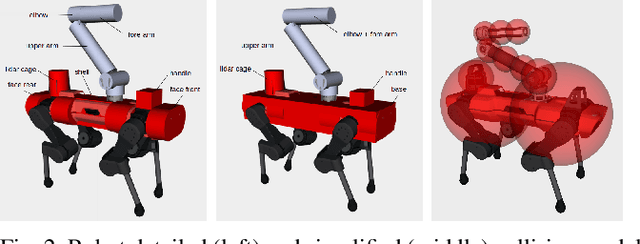

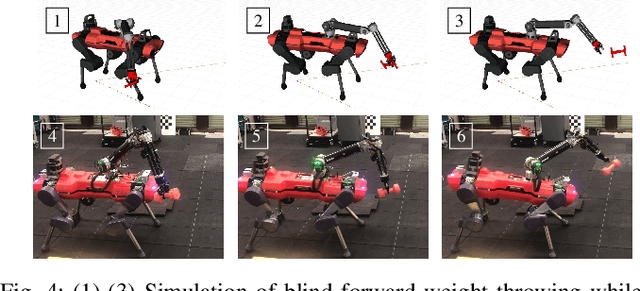
In this paper, we present a real-time whole-body planner for collision-free legged mobile manipulation. We enforce both self-collision and environment-collision avoidance as soft constraints within a Model Predictive Control (MPC) scheme that solves a multi-contact optimal control problem. By penalizing the signed distances among a set of representative primitive collision bodies, the robot is able to safely execute a variety of dynamic maneuvers while preventing any self-collisions. Moreover, collision-free navigation and manipulation in both static and dynamic environments are made viable through efficient queries of distances and their gradients via a euclidean signed distance field. We demonstrate through a comparative study that our approach only slightly increases the computational complexity of the MPC planning. Finally, we validate the effectiveness of our framework through a set of hardware experiments involving dynamic mobile manipulation tasks with potential collisions, such as locomotion balancing with the swinging arm, weight throwing, and autonomous door opening.