 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeObstacle-Avoidant Leader Following with a Quadruped Robot
Oct 01, 2024Personal mobile robotic assistants are expected to find wide applications in industry and healthcare. For example, people with limited mobility can benefit from robots helping with daily tasks, or construction workers can have robots perform precision monitoring tasks on-site. However, manually steering a robot while in motion requires significant concentration from the operator, especially in tight or crowded spaces. This reduces walking speed, and the constant need for vigilance increases fatigue and, thus, the risk of accidents. This work presents a virtual leash with which a robot can naturally follow an operator. We use a sensor fusion based on a custom-built RF transponder, RGB cameras, and a LiDAR. In addition, we customize a local avoidance planner for legged platforms, which enables us to navigate dynamic and narrow environments. We successfully validate on the ANYmal platform the robustness and performance of our entire pipeline in real-world experiments.
Waverider: Leveraging Hierarchical, Multi-Resolution Maps for Efficient and Reactive Obstacle Avoidance
May 22, 2024



Fast and reliable obstacle avoidance is an important task for mobile robots. In this work, we propose an efficient reactive system that provides high-quality obstacle avoidance while running at hundreds of hertz with minimal resource usage. Our approach combines wavemap, a hierarchical volumetric map representation, with a novel hierarchical and parallelizable obstacle avoidance algorithm formulated through Riemannian Motion Policies (RMP). Leveraging multi-resolution obstacle avoidance policies, the proposed navigation system facilitates precise, low-latency (36ms), and extremely efficient obstacle avoidance with a very large perceptive radius (30m). We perform extensive statistical evaluations on indoor and outdoor maps, verifying that the proposed system compares favorably to fixed-resolution RMP variants and CHOMP. Finally, the RMP formulation allows the seamless fusion of obstacle avoidance with additional objectives, such as goal-seeking, to obtain a fully-fledged navigation system that is versatile and robust. We deploy the system on a Micro Aerial Vehicle and show how it navigates through an indoor obstacle course. Our complete implementation, called waverider, is made available as open source.
Efficient volumetric mapping of multi-scale environments using wavelet-based compression
Jun 02, 2023



Volumetric maps are widely used in robotics due to their desirable properties in applications such as path planning, exploration, and manipulation. Constant advances in mapping technologies are needed to keep up with the improvements in sensor technology, generating increasingly vast amounts of precise measurements. Handling this data in a computationally and memory-efficient manner is paramount to representing the environment at the desired scales and resolutions. In this work, we express the desirable properties of a volumetric mapping framework through the lens of multi-resolution analysis. This shows that wavelets are a natural foundation for hierarchical and multi-resolution volumetric mapping. Based on this insight we design an efficient mapping system that uses wavelet decomposition. The efficiency of the system enables the use of uncertainty-aware sensor models, improving the quality of the maps. Experiments on both synthetic and real-world data provide mapping accuracy and runtime performance comparisons with state-of-the-art methods on both RGB-D and 3D LiDAR data. The framework is open-sourced to allow the robotics community at large to explore this approach.
maplab 2.0 -- A Modular and Multi-Modal Mapping Framework
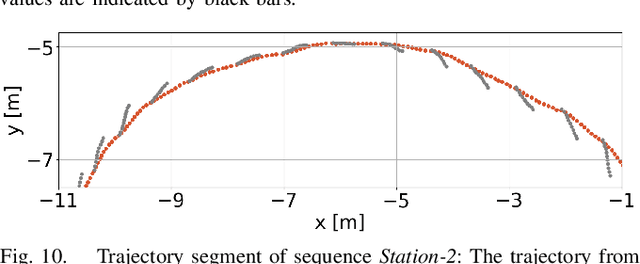
Dec 01, 2022Integration of multiple sensor modalities and deep learning into Simultaneous Localization And Mapping (SLAM) systems are areas of significant interest in current research. Multi-modality is a stepping stone towards achieving robustness in challenging environments and interoperability of heterogeneous multi-robot systems with varying sensor setups. With maplab 2.0, we provide a versatile open-source platform that facilitates developing, testing, and integrating new modules and features into a fully-fledged SLAM system. Through extensive experiments, we show that maplab 2.0's accuracy is comparable to the state-of-the-art on the HILTI 2021 benchmark. Additionally, we showcase the flexibility of our system with three use cases: i) large-scale (approx. 10 km) multi-robot multi-session (23 missions) mapping, ii) integration of non-visual landmarks, and iii) incorporating a semantic object-based loop closure module into the mapping framework. The code is available open-source at https://github.com/ethz-asl/maplab.
Incremental 3D Scene Completion for Safe and Efficient Exploration Mapping and Planning
Aug 17, 2022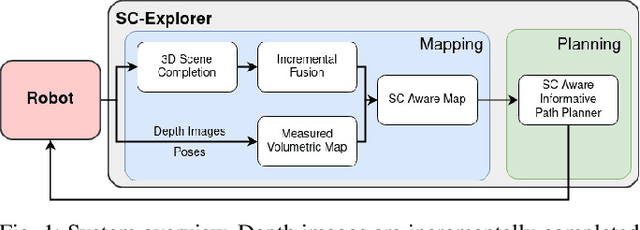
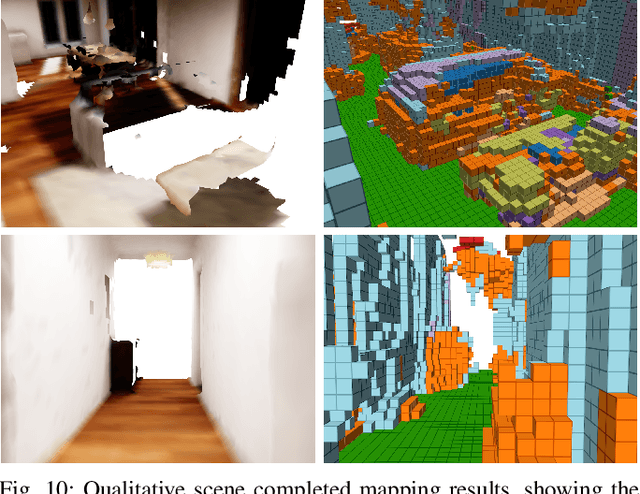
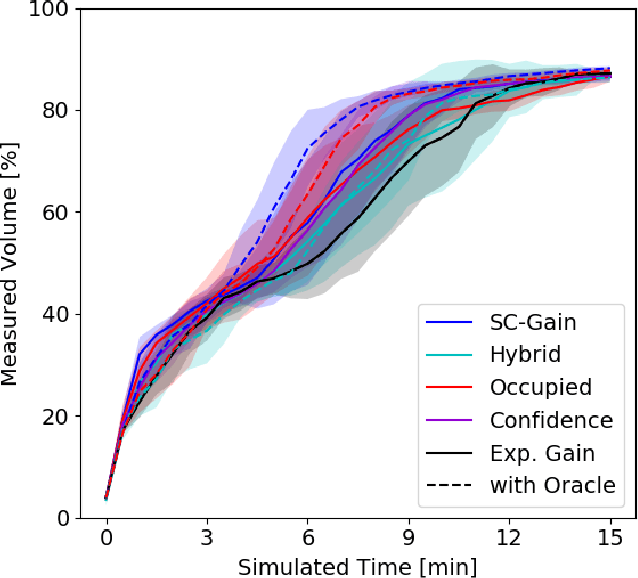
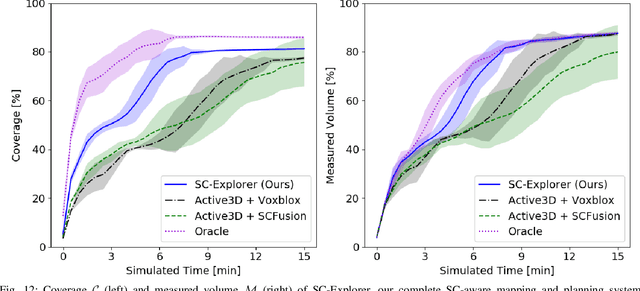
Exploration of unknown environments is a fundamental problem in robotics and an essential component in numerous applications of autonomous systems. A major challenge in exploring unknown environments is that the robot has to plan with the limited information available at each time step. While most current approaches rely on heuristics and assumption to plan paths based on these partial observations, we instead propose a novel way to integrate deep learning into exploration by leveraging 3D scene completion for informed, safe, and interpretable exploration mapping and planning. Our approach, SC-Explorer, combines scene completion using a novel incremental fusion mechanism and a newly proposed hierarchical multi-layer mapping approach, to guarantee safety and efficiency of the robot. We further present an informative path planning method, leveraging the capabilities of our mapping approach and a novel scene-completion-aware information gain. While our method is generally applicable, we evaluate it in the use case of a Micro Aerial Vehicle (MAV). We thoroughly study each component in high-fidelity simulation experiments using only mobile hardware, and show that our method can speed up coverage of an environment by 73% compared to the baselines with only minimal reduction in map accuracy. Even if scene completions are not included in the final map, we show that they can be used to guide the robot to choose more informative paths, speeding up the measurement of the scene with the robot's sensors by 35%. We make our methods available as open-source.
Team CERBERUS Wins the DARPA Subterranean Challenge: Technical Overview and Lessons Learned
Jul 11, 2022
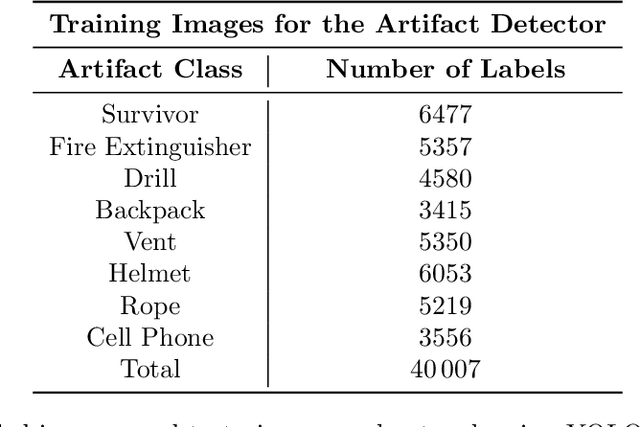
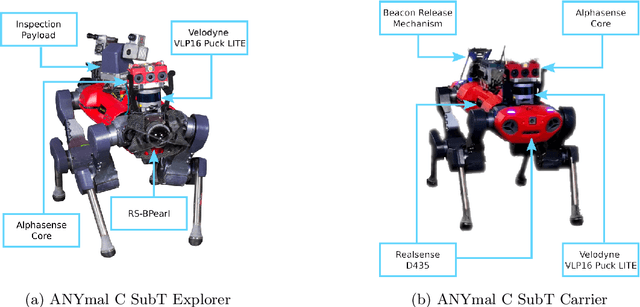
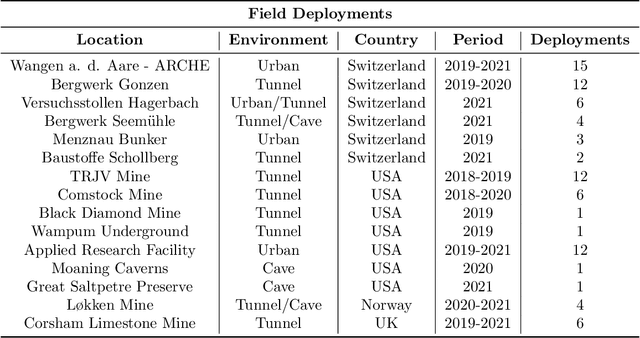
This article presents the CERBERUS robotic system-of-systems, which won the DARPA Subterranean Challenge Final Event in 2021. The Subterranean Challenge was organized by DARPA with the vision to facilitate the novel technologies necessary to reliably explore diverse underground environments despite the grueling challenges they present for robotic autonomy. Due to their geometric complexity, degraded perceptual conditions combined with lack of GPS support, austere navigation conditions, and denied communications, subterranean settings render autonomous operations particularly demanding. In response to this challenge, we developed the CERBERUS system which exploits the synergy of legged and flying robots, coupled with robust control especially for overcoming perilous terrain, multi-modal and multi-robot perception for localization and mapping in conditions of sensor degradation, and resilient autonomy through unified exploration path planning and local motion planning that reflects robot-specific limitations. Based on its ability to explore diverse underground environments and its high-level command and control by a single human supervisor, CERBERUS demonstrated efficient exploration, reliable detection of objects of interest, and accurate mapping. In this article, we report results from both the preliminary runs and the final Prize Round of the DARPA Subterranean Challenge, and discuss highlights and challenges faced, alongside lessons learned for the benefit of the community.
CERBERUS: Autonomous Legged and Aerial Robotic Exploration in the Tunnel and Urban Circuits of the DARPA Subterranean Challenge
Jan 18, 2022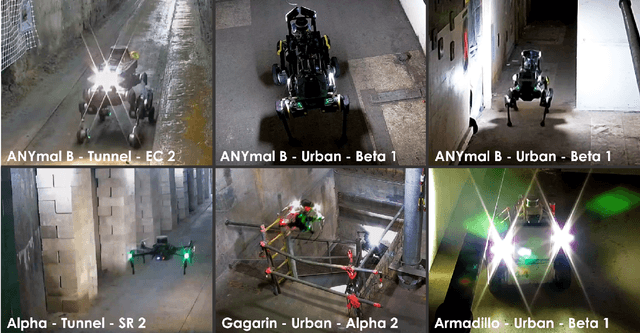
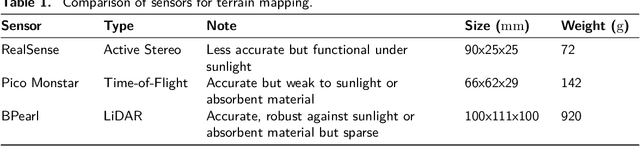

Autonomous exploration of subterranean environments constitutes a major frontier for robotic systems as underground settings present key challenges that can render robot autonomy hard to achieve. This has motivated the DARPA Subterranean Challenge, where teams of robots search for objects of interest in various underground environments. In response, the CERBERUS system-of-systems is presented as a unified strategy towards subterranean exploration using legged and flying robots. As primary robots, ANYmal quadruped systems are deployed considering their endurance and potential to traverse challenging terrain. For aerial robots, both conventional and collision-tolerant multirotors are utilized to explore spaces too narrow or otherwise unreachable by ground systems. Anticipating degraded sensing conditions, a complementary multi-modal sensor fusion approach utilizing camera, LiDAR, and inertial data for resilient robot pose estimation is proposed. Individual robot pose estimates are refined by a centralized multi-robot map optimization approach to improve the reported location accuracy of detected objects of interest in the DARPA-defined coordinate frame. Furthermore, a unified exploration path planning policy is presented to facilitate the autonomous operation of both legged and aerial robots in complex underground networks. Finally, to enable communication between the robots and the base station, CERBERUS utilizes a ground rover with a high-gain antenna and an optical fiber connection to the base station, alongside breadcrumbing of wireless nodes by our legged robots. We report results from the CERBERUS system-of-systems deployment at the DARPA Subterranean Challenge Tunnel and Urban Circuits, along with the current limitations and the lessons learned for the benefit of the community.
Autonomous Teamed Exploration of Subterranean Environments using Legged and Aerial Robots
Nov 11, 2021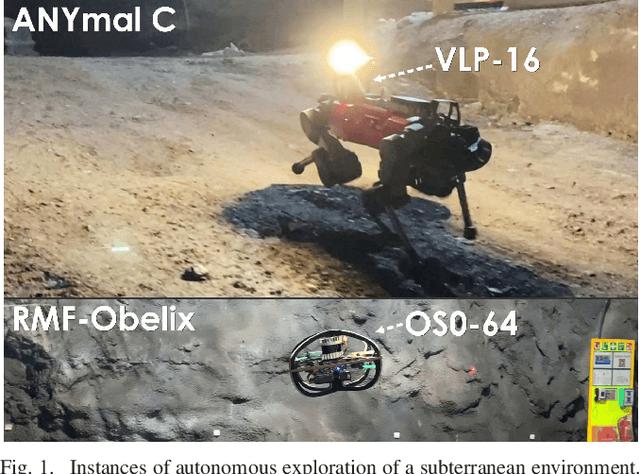
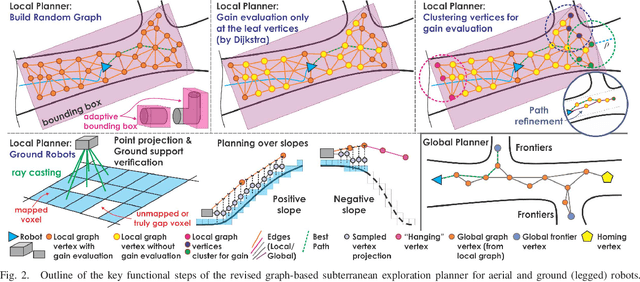
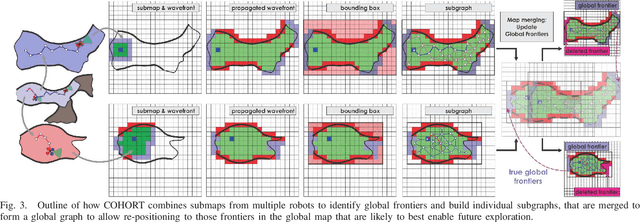
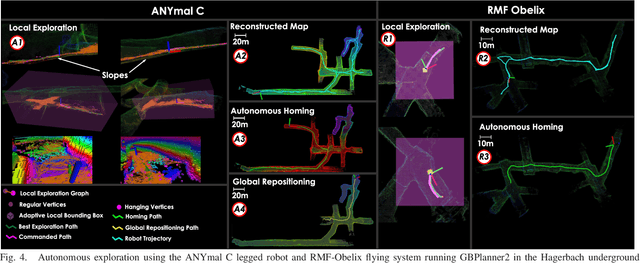
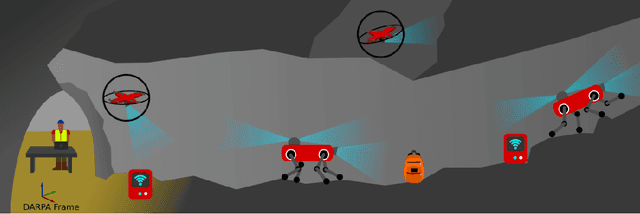
This paper presents a novel strategy for autonomous teamed exploration of subterranean environments using legged and aerial robots. Tailored to the fact that subterranean settings, such as cave networks and underground mines, often involve complex, large-scale and multi-branched topologies, while wireless communication within them can be particularly challenging, this work is structured around the synergy of an onboard exploration path planner that allows for resilient long-term autonomy, and a multi-robot coordination framework. The onboard path planner is unified across legged and flying robots and enables navigation in environments with steep slopes, and diverse geometries. When a communication link is available, each robot of the team shares submaps to a centralized location where a multi-robot coordination framework identifies global frontiers of the exploration space to inform each system about where it should re-position to best continue its mission. The strategy is verified through a field deployment inside an underground mine in Switzerland using a legged and a flying robot collectively exploring for 45 min, as well as a longer simulation study with three systems.
Dynamic Object Aware LiDAR SLAM based on Automatic Generation of Training Data
Apr 08, 2021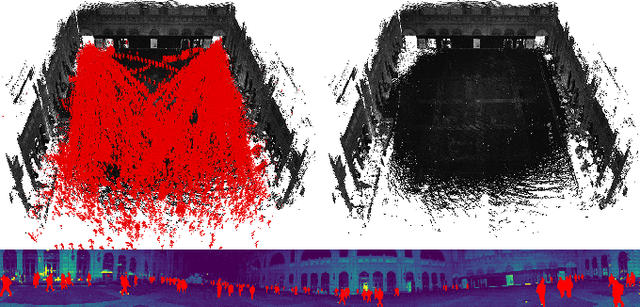
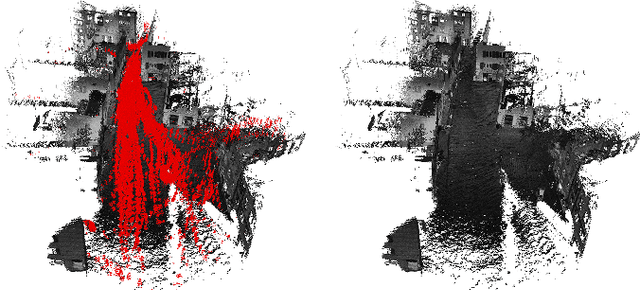
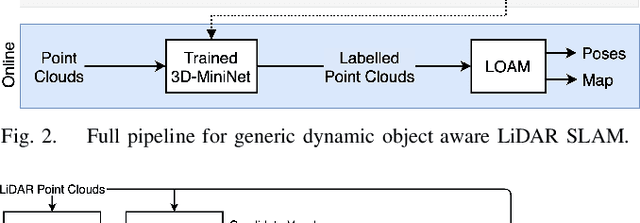
Highly dynamic environments, with moving objects such as cars or humans, can pose a performance challenge for LiDAR SLAM systems that assume largely static scenes. To overcome this challenge and support the deployment of robots in real world scenarios, we propose a complete solution for a dynamic object aware LiDAR SLAM algorithm. This is achieved by leveraging a real-time capable neural network that can detect dynamic objects, thus allowing our system to deal with them explicitly. To efficiently generate the necessary training data which is key to our approach, we present a novel end-to-end occupancy grid based pipeline that can automatically label a wide variety of arbitrary dynamic objects. Our solution can thus generalize to different environments without the need for expensive manual labeling and at the same time avoids assumptions about the presence of a predefined set of known objects in the scene. Using this technique, we automatically label over 12000 LiDAR scans collected in an urban environment with a large amount of pedestrians and use this data to train a neural network, achieving an average segmentation IoU of 0.82. We show that explicitly dealing with dynamic objects can improve the LiDAR SLAM odometry performance by 39.6% while yielding maps which better represent the environments. A supplementary video as well as our test data are available online.
A Unified Approach for Autonomous Volumetric Exploration of Large Scale Environments under Severe Odometry Drift
Oct 19, 2020
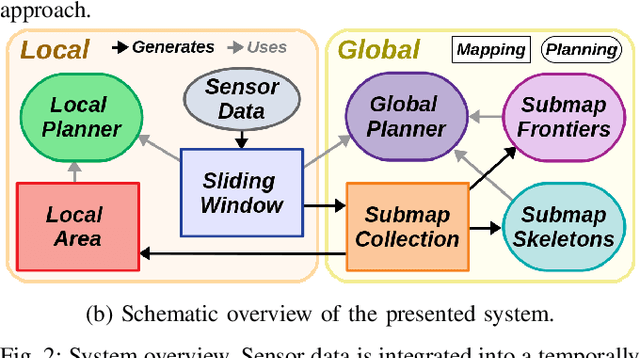


Exploration is a fundamental problem in robot autonomy. A major limitation, however, is that during exploration robots oftentimes have to rely on on-board systems alone for state estimation, accumulating significant drift over time in large environments. Drift can be detrimental to robot safety and exploration performance. In this work, a submap-based, multi-layer approach for both mapping and planning is proposed to enable safe and efficient volumetric exploration of large scale environments despite odometry drift. The central idea of our approach combines local (temporally and spatially) and global mapping to guarantee safety and efficiency. Similarly, our planning approach leverages the presented map to compute global volumetric frontiers in a changing global map and utilizes the nature of exploration dealing with partial information for efficient local and global planning. The presented system is thoroughly evaluated and shown to outperform state of the art methods even under drift-free conditions. Our system, termed GLoca}, will be made available open source.